7 Ю Л
о
Oi
сд
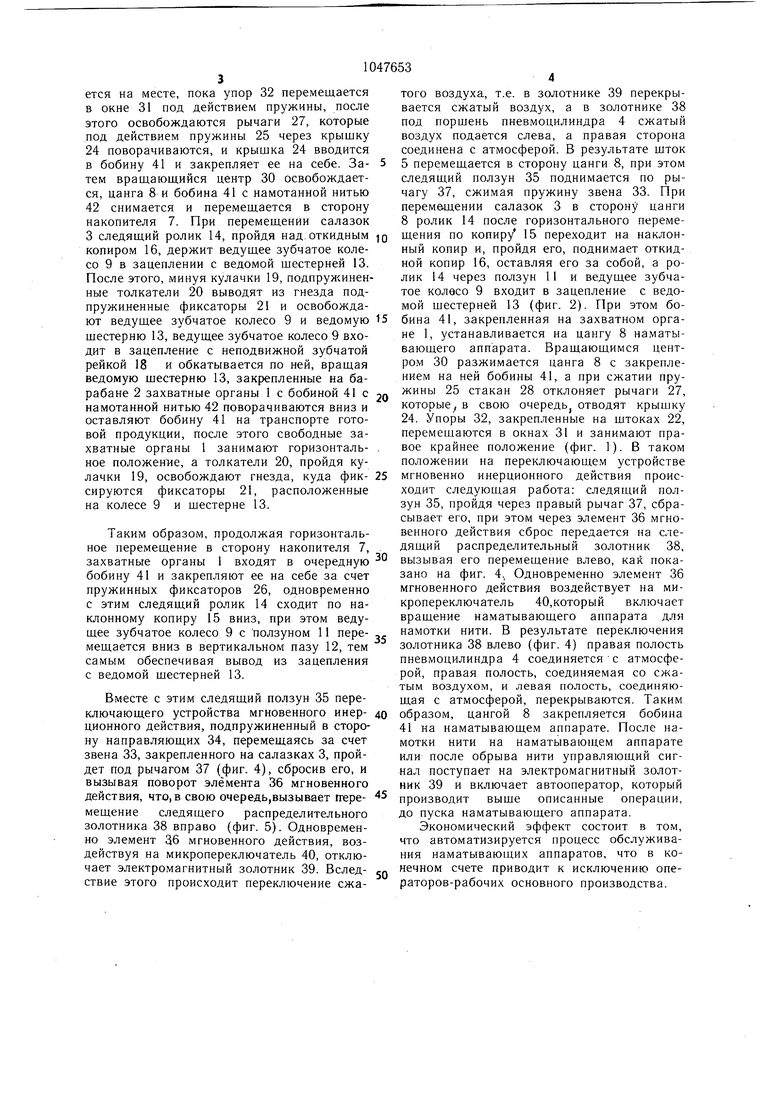
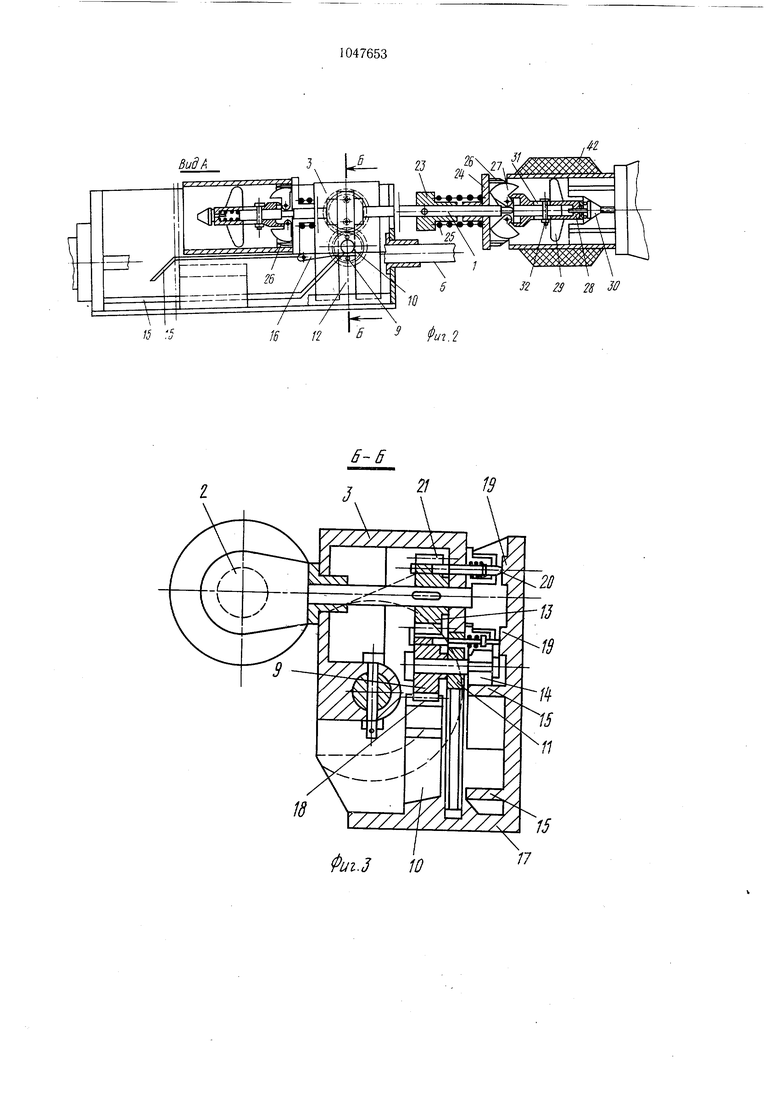
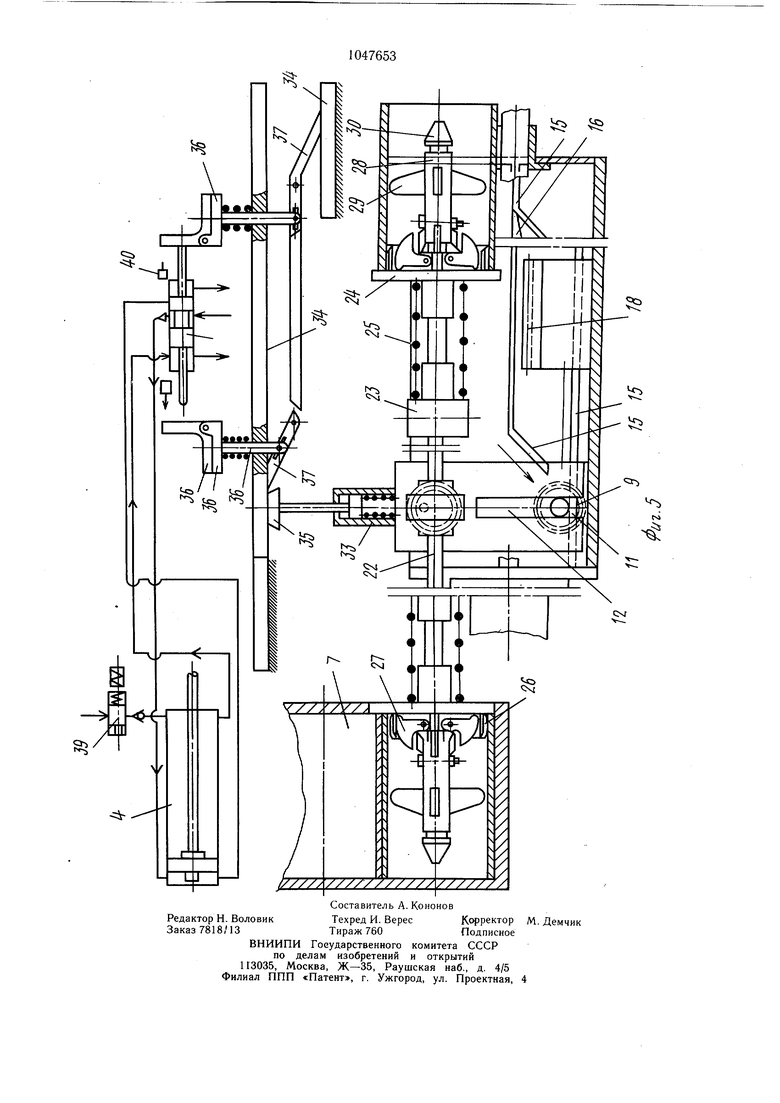
оо т Изобретение относится к машиностроению, а именно к автооператорам для загрузки и разгрузки бобин при обслуживании наматывающих аппаратов и может быть использовано для захвата и транспортировки изделий типа колец и втулок. Известен автооператор поворотный двухзахватный для одновременной автоматической загрузки штучных изделий, содержащий захватные органы, смонтированные на поворотном барабане, установленном на салазках, механизм преобразования движений и привод 1. Недостатком известного автооператора является то, что при повороте на 180° увеличивается длина барабане более- чем в 2 раза из-за увеличения длин копирных пазов, выполненных на барабане, а кроме того, данный автооператор не может ориентировать и закреплять изделия. Цель изобретения - повышение производительности и надежности работы автооператора. Поставленная цель достигается тем, что в автооператоре, содержащем захватные органы, смонтированные на поворотном барабане, установленном на салазках, механизм преобразования движения и привод, механизм преобразования движений выполнен в виде зубчатой рейки, ползуна, зубчатой пары, ролика и копира, причем ролик смонтирован на оси ведущего колеса зубчатой пары, ось смонтирована в ползуне, установленном в вертикальном пазу, выполненном в салазках, а ведомая шестерня зубчатой пары жестко связана с барабаном, каждый захватный орган выполнен в виде опорной втулки, подпружиненной относительно нее крышки, пружинных фиксаторов, установленных по периметру крышки, вращающих центров и стаканов с центрирующим элементом. На фиг. 1 изображен автооператор, разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 2; на фиг. 4 - автооператор с повернутым на 90° барабаном; на фиг. 5 - автооператор в момент взятия бобины из накопителя. Автооператор состоит из захватных органов 1, смонтированных на поворотном барабане 2, установленном на салазках 3. Привод выполнен в виде пневмоцилиндра 4, шток 5 которого связан с горизонтальными направляющими 6, на которых установлены салазки 3, перемещающиеся между накопителем 7 и цангой 8 наматывающего аппарата. Поворот захватных органов 1 осуществляется от пневмоцилиндра 4 через механизм преобразования движения, состоящий из ведущего зубчатого колеса 9, ось 10 которого установлена в ползуне II, смонтированном в вертикальном пазу 12, выполненном в салазках 3, и ведомой щестерни 13, жестко установленной на барабане 2. Для управления ползуном 11 на оси 10 установлен следящий ролик 14, взаимодействующий с копиром 15 и откидным копиром 16. На корпусе 17 механизма преобразования движения установлена неподвижная зубчатая рейка 18 и кулачки 19, которые через толкатели 20, подпружиненные относительно салазок 3, связаны с фиксаторами 21. Захватные органы 1 закреплены на ступенчатых штоках 22, выполнены в виде опорных втулок 23 и крышек 24, подпружиненных пружинами 25 относительно их, причем по периметру крышки 24 установлены пружинные фиксаторы 26. Крышки 24 взаимодействуют с рычагами 27, контактирующими со стаканами 28, на которых установлены элементы центрирования 29 и вращающиеся центры 30. При этом стаканы 28 снабжены окнами 31, в которые входят упоры 32, закрепленные на штоках 22. Работа привода управляется переключающи.м устройством инерционного действия. Переключающее устройство мгновенного инерционного действия содержит звено 33 с возвратно-поступательным перемещением и снабжено подпружиненным в сторону направляющих 34 следящим ползуном 35, причем на неподвижных направляющих 34 установлены подпружиненные элементы зб мгновенного действия, связанные подвиж„д рычагами 37, которые расположены между направляющими 34 с возможностью пропуска под собой следящего ползуна 35. Переключающим органом в устройстве является следящий распределительный золотник 38, который размещен между элементамизб м7новённого дей7т7ияГдляобеспечения замкнутого слежения за работой пневмоцилиндра 4 имеется электромагнитный золотник 39 и два микропереключателя 40, расположенные напротив каждого элемента 36 мгновенного действия, причем один микропереключатель 40 связан с электромагнитным золотником 39, а другой - с электродвигателем, служащим приводом вращения цанги 8 (не показан). Автооператор работает следующим образом. Началом работы служит управляющий сигнал, поступающий на электромагнитный золотник 39 после полного цикла намотки или после сигнала следящего за обрывностью нити датчика (не показан). После перемещения электромагнитного золотника 39 под поршень пневмоцилиндра 4поступает сжатый воздух и через шток 5и горизонтальные направляющие 6, на которых закреплены салазки 3, происходит перемещение захватных органов от цанги 8. При этом бобина 41 с намотанной нитью 42 захватывается крышкой 24 с пружиннными фиксаторами 26. Стакан 28 остается на месте, пока упор 32 перемещается в окне 31 под действием пружины, после этого освобождаются рычаги 27, которые под действием пружины 25 через крышку 24 поворачиваются, и крышка 24 вводится в бобину 41 и закрепляет ее на себе. Затем вращаюш ийся центр 30 освобождается, цанга 8 и бобина 41 с намотанной нитью 42 снимается и перемещается в сторону накопителя 7. При перемещении салазок 3 следящий ролик 14, пройдя над. откидным копиром 16, держит ведущее зубчатое колесо 9 в зацеплении с ведомой шестерней 13. После этого, минуя кулачки 19, подпружиненные толкатели 20 выводят из гнезда подпружиненные фиксаторы 21 и освобождают ведущее зубчатое колесо 9 и ведомую шестерню 13, ведущее зубчатое колесо 9 входит в зацепление с неподвижной зубчатой рейкой 18 и обкатывается по ней, вращая ведомую щестерню 13, закрепленные на барабане 2 захватные органы I с бобиной 41 с намотанной нитью 42 поворачиваются вниз и оставляют бобину 41 на транспорте готовой продукции, после этого свободные захватные органы 1 занимают горизонтальное положение, а толкатели 20, пройдя кулачки 19, освобождают гнезда, куда фиксируются фиксаторы 21, расположенные на колесе 9 и шестерне 13. Таким образом, продолжая горизонтальное перемещение в сторону накопителя 7, захватные органы 1 входят в очередную бобину 41 и закрепляют ее на себе за счет пружинных фиксаторов 26, одновременно с этим следящий ролик 14 сходит по наклонному копиру 15 вниз, при этом ведущее зубчатое колесо 9 с ползуном 11 перемещается вниз в вертикальном пазу 12, тем самым обеспечивая вывод из зацепления с ведомой щестерней 13. Вместе с этим следящий ползун 35 переключающего устройства мгновенного инерционного действия, подпружиненный в сторону направляющих 34, перемещаясь за счет звена 33, закрепленного на салазках 3, пройдет под рычагом 37 (фиг. 4), сбросив его, и вызывая поворот элемента 36 мгновенного действия, что,в свою очередь,вызывает гтеремещение следящего распределительного золотника 38 вправо (фиг. 5). Одновременно элемент 36 мгновенного действия, воздействуя на микропереключатель 40, отключает электромагнитный золотник 39. Вследствие этого происходит переключение ежатого воздуха, т.е. в золотнике 39 перекрывается сжатый воздух, а в золотнике 38 под поршень пневмоцилиндра 4 сжатый воздух подается слева, а правая сторона соединена с атмосферой. В результате шток 5 перемешается в сторону цанги 8, при этом следяший ползун 35 поднимается по рычагу 37, сжимая пружину звена 33. При переме.шении салазок 3 в сторону цанги 8 ролик 14 после горизонтального перемешения по копиру 15 переходит на наклонныи копир и, пройдя его, поднимает откидной копир 16, оставляя его за собой, а ролик 14 через ползун 11 и ведущее зубчатое колесо 9 входит в зацепление с ведомой шестерней 13 (фиг. 2). При этом бобина 41, закрепленная на захватном органе 1, устанавливается на цангу 8 наматывающего аппарата. Вращающимся центром 30 разжимается цанга 8 с закреплением на ней бобины 41, а при сжатии 25 стакан 28 отклоняет рычаги 27, которые в свою очередь отводят крышку 24. Упоры 32, закрепленные на штоках 22, перемещаются в окнах 31 и занимают правое крайнее положение (фиг. 1). В таком положении на переключающем устройстве мгновенно инерционного действия происходит следующая работа: следящий ползун 35, пройдя через правый рычаг 37, сбрасывает его, при этом через элемент 36 мгновенного действия сброс передается на следящий распределительный золотник 38, вызывая его перемещение влево, кай показано на фиг. 4., Одновременно элемент 36 мгновенного действия воздействует на микропереключатель 40,который включает вращение наматывающего аппарата для намотки нити. В результате переключения золотника 38 влево (фиг. 4) правая полость пневмоцилиндра 4 соединяется с атмосферой, правая полость, соединяемая со сжатым воздухом, и левая полость, соединяющая с атмосферой, перекрываются. Таким образом, цангой 8 закрепляется бобина 41 на наматывающем аппарате. После намотки нити на наматывающем аппарате или после обрыва нити управляющий сигнал поступает на электромагнитный золотник 39 и включает автооператор, который производит выше описанные операции, до пуска наматывающего аппарата, Экономический эффект состоит в том, что автоматизируется процесс обслуживания наматывающих аппаратов, что в копечном счете приводит к исключению операторов-рабочих основного производства. 32 23 28 30
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПАКОВКИ СТЕРЖНЕОБРАЗНЫХПРЕДМЕТОВ | 1971 |
|
SU420505A1 |
| Устройство для автоматического регулирования линейной скорости вытяжки волокна | 1981 |
|
SU1057446A1 |
| Ленточно-шлифовальный станок для обра-бОТКи НАРужНОй пОВЕРХНОСТи длиННОМЕРНыХТРуб СлОжНОгО пРОфиля | 1979 |
|
SU818827A1 |
| Устройство для наложения ленточного материала на барабан сборочного станка | 1988 |
|
SU1565722A2 |
| Устройство для наложения ленточного материала на барабан сборочного станка | 1984 |
|
SU1141012A2 |
| Многошпиндельный копировально-фрезерный станок | 1974 |
|
SU682327A1 |
| Роторно-конвейерная машина | 1988 |
|
SU1574479A1 |
| Роторный станок для шлифования отверстий деталей | 1989 |
|
SU1660940A1 |
| Способ обкатки беговой дорожки оси велопедали и роторно-конвейерная линия для его осуществления | 1990 |
|
SU1781016A1 |
| Устройство для подгонки величиныСОпРОТиВлЕНия РЕзиСТОРОВ | 1979 |
|
SU828223A1 |
АВТООПЕРАТОР, содержащий захватные органы, смонтированные на поворотном барабане, установленном на салазках, механизм преобразования движений и привод, отличающийся тем, что, с целью повышения производительности и надежности, механизм преобразования движения выполнен в виде зубчатой рейки, ползуна, зубчатой пары, ролика и копира, причем ролик смонтирован на оси ведущего колеса зубчатой пары, ось смонтирована в ползуне, установленном Б вертикальном пазу, выполненном в салазках, а ведомая шестерня зубчатой пары жестко связана с барабаном, кроме того, захватные органы выполнены в виде опорных втулок, крышек, подпружиненных относительно них, пружинных фиксаторов, установленных по периметру крышек, враш.аюших центров и стаканов с центрируюшими элементами.
///y///////////////////////////
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АВТООПЕРАТОР ПОВОРОТНЫЙ ДВУХЗАХВАТНЫЙ | 0 |
|
SU275672A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
