Изобретение относится к подъемно- транспортному машиностроению и может найти применение в системах для управления уравновешивающим подъемником, и в частности, его силовым органом.
Цель изобретения - удобство эксплуатации .
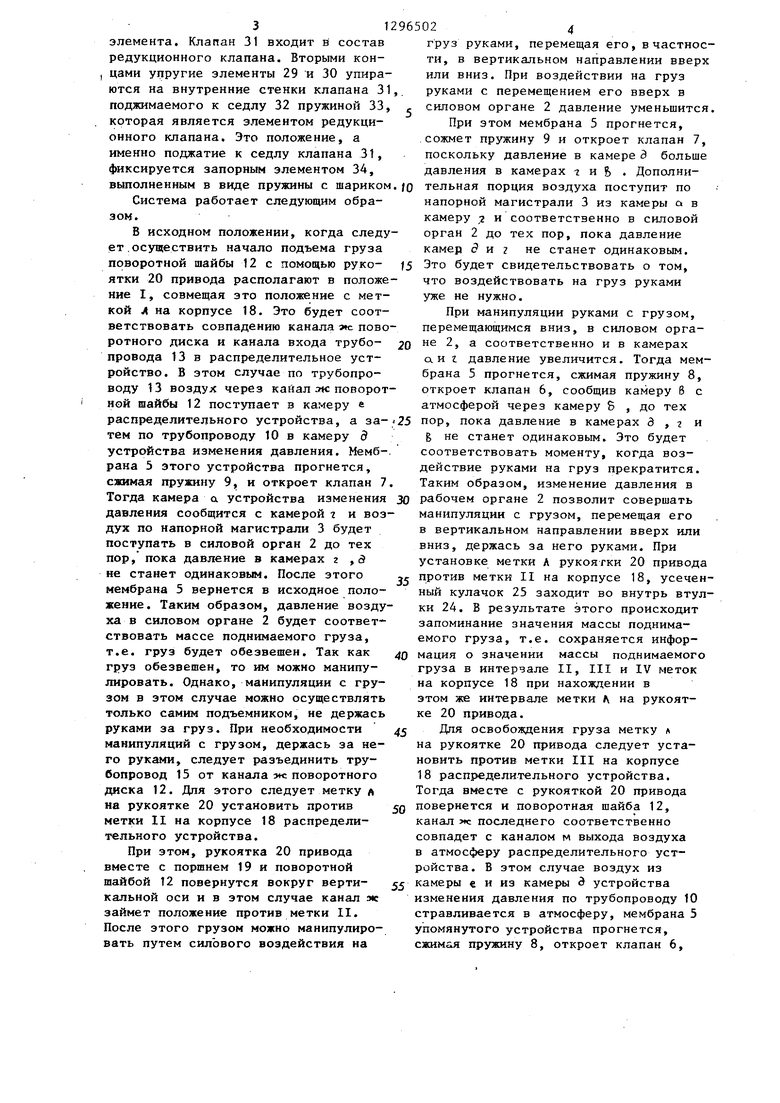
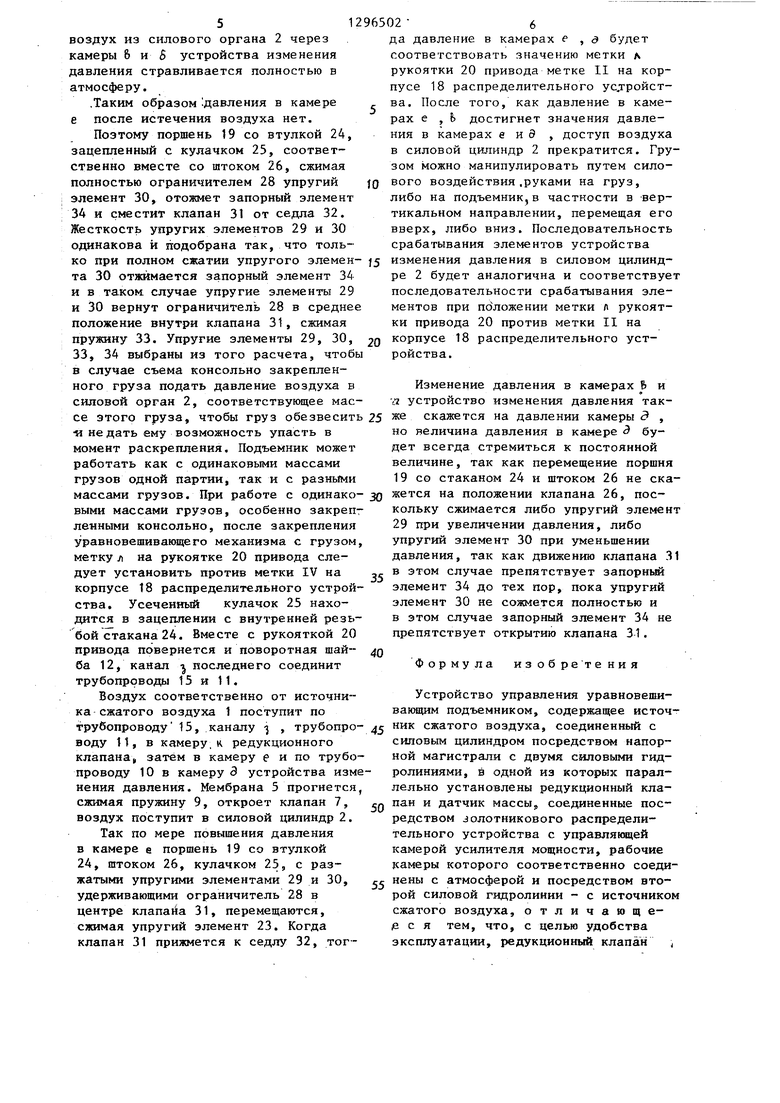
На фиг. 1 дана принципиальная комбинированная схема устройства; на фиг. 2 - разрез В-Б на фиг. 1; на фиг. 3 - вид В на фиг. 1.
Устройство управления уравновешивающим подъемником состоит из источника сжатого воздуха 1, соединенного f5 на том же горизонтальном уровне, что с силоаьгм органом 2, выполненным в и вход канала , Через поворотную виде пневмоцилиндра, посредством на- шайбу 12 с возможностью возвратно- порной магистрали 3, в которой уста- поступательного перемещения и с иск- новлено устройство изменения давления лючением поворота пропущен подвижный в силовом органе. Устройство измене- 20 элемент редукционного клапана, сос- ния давления содержит корпус 4, гд е расположена мембрана 5, в которую упираются с обеих сторон клапаны 6 и 7s поджимаемые соответственно пру25
жинами 8 и 9. В корпусе Д имеется несколько камер: а, б. В, г,Э. Камера а сообщена с источником сжатого воздуха, камера S - с атмосферой, Камеры Б и г сообщены с силовым органом 2. Камера Э устройства изменения 30 рукоятки 20 привода, соответстауищее давления соединена трубопроводом 10 каждой из упомянутых меток на корпусе
тоящий из поршня 19, связанного с приводом (не показан), имеющим рукоятку 20.
На рукоятке 20 привода имеется одна метка л , а на корпусе 18 распределительного устройства 4 метки I, II, Ш, IV, соответствукщие четырем положениям метки А рукоятки 20 привода. Причем, каждое положение
с выходом распределительного устройства, причем выход расположен в камере е упомянутого устройства.
Магистраль управления включает в себя упомянутый трубопровод 10, трубопровод 11, соединяющий вход редукционного клапана - камера К с рас- йределительным устройством, в частности с его золотником, образованным 40 рается концами соответственно в торец
поворотной шайбой 12
Одновременно в магистраль управления входит трубопровод 13, соединяющий датчик массы 14 также с расПределительным устройством, а именно, 45 ка 24 с внутренней резьбой. Внутри
,с поворотной шайбой 12. Кроме того, в магистраль управления входит трубопровод 15, соединяющий источник сжатого воздуха 1 тоже с поворотной шайбой 12 распределительного устройства, который расположен между упорами 16 и 17 в корпусе 18 распределительного устройства. В поворотной Шайбе 12 выполнены каналы п: и . Причем канал j и вход канала яс в поворотной шайбе 12 выполнены на разных горизонтальных уровнях и расстояние между этими уровнями больше суммы радиусов каналов лс и . Вход и вы
ход канала з в поворотной шайбе 12 выполнены под углом d. , равном углу ji между входом трубопровода 13 в корпус 18 распределительного устройства и выходом из последнего трубопровода 11. Выход трубопровода 13 в поворотной шайбе 12 и канал м выхода воздуха в атмосферу в корпусе 18 распределительного устройства расположены на том же -горизонтальном уровне, что и канал Вход трубопровода 15 в поворотной шайбе 12 и выход трубопровода 11 из корпуса 18 распределительного устройства расположены
на том же горизонтальном уровне, что и вход канала , Через поворотную шайбу 12 с возможностью возвратно- поступательного перемещения и с иск- лючением поворота пропущен подвижный элемент редукционного клапана, сос-
рукоятки 20 привода, соответстауищее каждой из упомянутых меток на корпус
тоящий из поршня 19, связанного с приводом (не показан), имеющим рукоятку 20.
На рукоятке 20 привода имеется одна метка л , а на корпусе 18 распределительного устройства 4 метки I, II, Ш, IV, соответствукщие четырем положениям метки А рукоятки 20 привода. Причем, каждое положение
распределительного устройства фиксируется.
Поршень 19 перемещается в направ- 35 ляющих 21 с уплотнительными элементами (не показаны). На штоке 22 рукоятки 20 привода установлен выполненный в виде пружины элемент 23 редукционного клапана. Упругий элемент 23 упипоршня и корпус 18 распределительного устройства.
С противоположного торца поршня 19 эксцентрично по оси установлена втул-
втулки 24 расположен усеченный кулачок 25 штока 26, входящего в состав редукционного клапана. Шток 26 расположен соосно оси поршня 19 и уста50 новлен с возможностью возвратно-поступательного перемещения в направляющих 27, -исключающих его поворот вокруг его оси. Второй конец штока 26 снабжен ограничителем 28, выполненным
55 за одно целое со штоком 26, причем по обе стороны ограничителя 28 установлены упругие элементы 29 и 30, являющиеся составными частями клапана 31 и выполняющие функцию исполнительного
груз руками, перемещая его, в частнос ти, в вертикальном направлении вверх или вниз. При воздействии на груз руками с перемещением его вверх в силовом органе 2 давление уменьшится
При этом мембрана 5 прогнется, сожмет пружину 9 и откроет клапан 7, поскольку давление в камере Э больше давления в камерах -г и 5 . Дополнительная порция воздуха поступит по напорной магистрали 3 из камеры а в камеру ,2 и соответственно в силовой орган 2 до тех пор, пока давление камер д VI г не станет одинаковым. Это будет свидетельствовать о том, что воздействовать на груз руками уже не нужно.
При манипуляции руками с грузом, перемещающимся вниз, в силовом органе 2, а соответственно и в камерах аи г давление увеличится. Тогда мем брана 5 прогнется, сжимая пружину 8, откроет клапан 6, сообщив камеру 6 с атмосферой через камеру S , до тех
элемента. Клапан 31 входит в состав редукционного клапана. Вторыми кон- , цами уцругие элементы 29 и 30 упираются на внутренние стенки клапана 31, поджимаемого к седлу 32 пружиной 33, , которая является элементом редукционного клапана. Это положение, а именно поджатие к седлу клапана 31, фиксируется запорным элементом 34, выполненным в виде пружины с шариком.Q
Система работает следующим образом.
В исходном положении, когда следует .осуществить начало подъема груза поворотной шайбы 12 с помощью руко- t5 ятки 20 привода располагают в положение I, совмещая это положение с меткой Л на корпусе 18. Это будет соответствовать совпадению канала -ж поворотного диска и канала входа трубо- 20 провода 13 в распределительное устройство. В этом случае по трубопроводу 13 воздух через канал лс поворотной шайбы 12 поступает в камеру е распределительного устройства, а за- 25 пор, пока давление в камерах 3 , 2 и тем по трубопроводу 10 в камеру д В не станет одинаковым. Это будет устройства изменения давления. Мемб-. соответствовать моменту, когда воз- рана 5 этого устройства прогнется, действие руками на груз прекратится. сжимая пружину 9, и откроет клапан 7. Таким образом, изменение давления в Тогда камера а устройства изменения ЗО рабочем органе 2 позволит совершать давления сообщится с камерой i и воздух по напорной магистрали 3 будет поступать в силовой орган 2 до тех пор, пока давление в камерах г ,S не станет одинаковым. После этого мембрана 5 вернется в исходное положение . Таким образом, давление воздуха в силовом органе 2 будет соответ ствовать массе поднимаемого груза, т.е. груз будет обезвешен. Так как груз обезвешен, то им можно манипулировать. Однако, манипуляции с грузом в этом случае можно осуществлять только самим подъемником, не держась руками за груз. При необходимости манипуляций с грузом, держась за него руками, следует разъединить трубопровод 15 от канала ж: поворотного диска 12. Для этого следует метку А на рукоятке 20 установить против метки II на корпусе 18 распределительного устройства.
При этом, рукоятка 20 привода вместе с поршнем 19 и поворотной шайбой 12 повернутся вокруг вертикальной оси и в этом случае канал :ж займет положение против метки II. После этого грузом можно манипулировать путем силового воздействия на
40
манипуляции с грузом, перемещая его в вертикальном направлении вверх или вниз, держась за него руками. При установке метки А рукоятки 20 привода J2 против метки II на корпусе 18, усечен ный кулачок 25 заходит во внутрь втул ки 24. В результате этого происходит запоминание значения массы поднимаемого груза, т.е. сохраняется информация о значении массы поднимаемого груза в интервале И, III и IV меток на корпусе 18 при нахождении в этом же интервале метки Л на рукоятке 20 привода.
Для освобождения груза метку л на рукоятке 20 привода следует установить против метки III на корпусе 18 распределительного устройства. Тогда вместе с рукояткой 20 привода повернется и поворотная шайба 12, канал с последнего соответственно совпадет с каналом м выхода воздуха в атмосферу распределительного устройства. В этом случае воздух из камеры € и из камеры д устройства изменения давления по трубопроводу 10 стравливается в атмосферу, мембрана 5 упомянутого устройства прогнется, сжимая пружину 8, откроет клапан 6,
45
50
55
груз руками, перемещая его, в частности, в вертикальном направлении вверх или вниз. При воздействии на груз руками с перемещением его вверх в силовом органе 2 давление уменьшится
При этом мембрана 5 прогнется, сожмет пружину 9 и откроет клапан 7, поскольку давление в камере Э больше давления в камерах -г и 5 . Дополнительная порция воздуха поступит по напорной магистрали 3 из камеры а в камеру ,2 и соответственно в силовой орган 2 до тех пор, пока давление камер д VI г не станет одинаковым. Это будет свидетельствовать о том, что воздействовать на груз руками уже не нужно.
При манипуляции руками с грузом, перемещающимся вниз, в силовом органе 2, а соответственно и в камерах аи г давление увеличится. Тогда мембрана 5 прогнется, сжимая пружину 8, откроет клапан 6, сообщив камеру 6 с атмосферой через камеру S , до тех
пор, пока давление в камерах 3 , 2 и В не станет одинаковым. Это будет соответствовать моменту, когда воз- действие руками на груз прекратится. Таким образом, изменение давления в рабочем органе 2 позволит совершать
пор, пока давление в камерах 3 , 2 и В не станет одинаковым. Это будет соответствовать моменту, когда воз- действие руками на груз прекратится. Таким образом, изменение давления в рабочем органе 2 позволит совершать
манипуляции с грузом, перемещая его в вертикальном направлении вверх или вниз, держась за него руками. При установке метки А рукоятки 20 привода против метки II на корпусе 18, усеченный кулачок 25 заходит во внутрь втулки 24. В результате этого происходит запоминание значения массы поднимаемого груза, т.е. сохраняется информация о значении массы поднимаемого груза в интервале И, III и IV меток на корпусе 18 при нахождении в этом же интервале метки Л на рукоятке 20 привода.
Для освобождения груза метку л на рукоятке 20 привода следует установить против метки III на корпусе 18 распределительного устройства. Тогда вместе с рукояткой 20 привода повернется и поворотная шайба 12, канал с последнего соответственно совпадет с каналом м выхода воздуха в атмосферу распределительного устройства. В этом случае воздух из камеры € и из камеры д устройства изменения давления по трубопроводу 10 стравливается в атмосферу, мембрана 5 упомянутого устройства прогнется, сжимая пружину 8, откроет клапан 6,
воздух из силового органа 2 через камеры 6 и 5 устройства изменения давления стравливается полностью в атмосферу.
.Таким образом давления в камере е после истечения воздуха нет.
Поэтому поршень 19 со втулкой 24, зацепленный с кулачком 25, соответственно вместе со штоком 26, сжимая полностью ограничителем 28 упругий элемент 30, отожмет запорный элемент 34 и сместит клапан 31 от седла 32. Жесткость упругих элементов 29 и 30 одинакова и подобрана так, что только при полном сжатии упругого элемен- fj изменения давления в силовом цилиндта 30 отжимается запорный элемент 34 и в таком случае упругие элементы 29 и 30 вернут ограничитель 28 в среднее положение внутри клапана 31, сжимая пружину 33. Упругие элементы 29, 30, 33, 34 выбраны из того расчета, чтобы в случае съема консольно закрепленного груза подать давление воздуха в силовой орган 2, соответствующее массе этого груза, чтобы груз обезвесить и не дать ему возможность упасть в момент раскрепления. Подъемник может работать как с одинаковыми массами
Изменение давления в камерах 6 и д устройство изменения давления также скажется на давлении камеры Э , но величина давления в камере Э будет всегда стремиться к постоянной величине, так как перемещение поршня 19 со стаканом 24 и штоком 26 не скагрузов одной партии, так и с разными массами грузов. При работе с одинако- зо жется на положении клапана 26, пос- выми массами грузов, особенно закреп- кольку сжимается либо упругий элемент ленными консольно, после закрепления уравновешивающего механизма с грузом, метку л на рукоятке 20 привода следует установить против метки IV на корпусе 18 распределительного устройства. Усеченный кулачок 25 нахо29 при увеличении давления, либо упругий элемент 30 при уменьшении давления, так как движению клапана 31 ,г в этом случае препятствует запорный элемент 34 до тех пор, пока упругий элемент 30 не сожмется полностью и в этом случае запорный элемент 34 не препятствует открытию клапана 31.
дится в зацеплении с внутренней резьбой стакана 24. Вместе с рукояткой 20 привода повернется и поворотная шайба 12, канал -j последнего соединит трубопроводы 15 и 11.
Воздух соответственно от источника -сжатого воздуха 1 поступит по
29 при увеличении давления, либо упругий элемент 30 при уменьшении давления, так как движению клапана 31 ,г в этом случае препятствует запорный элемент 34 до тех пор, пока упругий элемент 30 не сожмется полностью и в этом случае запорный элемент 34 не препятствует открытию клапана 31.
40
Формула изобре тения
Устройство управления уравновешивающим подъемником, содержащее источ- трубопроводу 15, каналу } , трубопро- 5 сжатого воздуха, соединенный с воду 11, в камеру.к редукционного силовым цилиндром посредством напорклапана, затем в камеру е и по трубопроводу 10 в камеру 3 устройства изменения давления. Мембрана 5 прогнется, сжимая пружину 9, откроет клапан 7, воздух поступит в силовой цилиндр 2.
Так по мере повышения давления в камере е поршень 19 со втулкой 24, штоком 26, кулачком 25, с разжатыми упругими элементами 29 и 30, удерживающими ограничитель 28 в центре клапана 31, перемещаются, сжимая упругий элемент 23. Когда клапан 31 прижмется к седлу 32, тог
296502-6
да давление в камерах в , а будет соответствовать значению метки А рукоятки 20 привода метке II на корпусе 18 распределительного ус.тройст- на. После того, как давление в камерах е , Ь достигнет значения давления в камерах е и 9 , доступ воздуха в силовой цилиндр 2 прекратится. Грузом можно манипулировать путем сило- JO вого воздействия .руками на груз,
либо на подъемник, в частности в -вертикальном направлении, перемещая его вверх, либо вниз. Последовательность срабатывания элементов устройства
ре 2 будет аналогична и соответствует последовательности срабатывания элементов при пбложении метки л рукоятки привода 20 против метки II на корпусе 18 распределительного устройства.
Изменение давления в камерах 6 и д устройство изменения давления также скажется на давлении камеры Э , но величина давления в камере Э будет всегда стремиться к постоянной величине, так как перемещение поршня 19 со стаканом 24 и штоком 26 не скажется на положении клапана 26, пос- кольку сжимается либо упругий элемент
жется на положении клапана 26, пос- кольку сжимается либо упругий элемент
29 при увеличении давления, либо упругий элемент 30 при уменьшении давления, так как движению клапана 31 в этом случае препятствует запорный элемент 34 до тех пор, пока упругий элемент 30 не сожмется полностью и в этом случае запорный элемент 34 не препятствует открытию клапана 31.
40
Формула изобре тения
ной магистрали с двумя силовыми гидролиниями, в одной из которых параллельно установлены редукционный клапан и датчик массы, соединенные посредством золотникового распределительного устройства с управлянэдей камерой усилителя мощности, рабочие камеры которого соответственно соеди- нены с атмосферой и посредством второй силовой гидролинии - с источником сжатого воздуха, отличающейся тем, что, с целью удобства эксплуатации, редукционный клапа.н j
7-1296502-8
содержит размещенные в установленных кулачка, при этом золотниковое рас- в корпусе одних и других направля- пределительнйе устройство представляющих соответственно поршень с экс- j ет собой размещенную в упомянутом центрично закрепленной на его торце корпусе и охватывакяцую поршень пово5 ротную шайбу, вьшолненную с каналами
втулкой с внутренней резьбой и кулачок, установленный соосно поршню и с возможностью взаимодействия с резьбой втулки, и фиксатор положения
для соединения редукционного клапана и датчика массы с управляющей каме- .рой усилителя мощности.
для соединения редукционного клапана и датчика массы с управляющей каме- .рой усилителя мощности.
Фиг.1
Эксцентриситет
Л
Фиг.3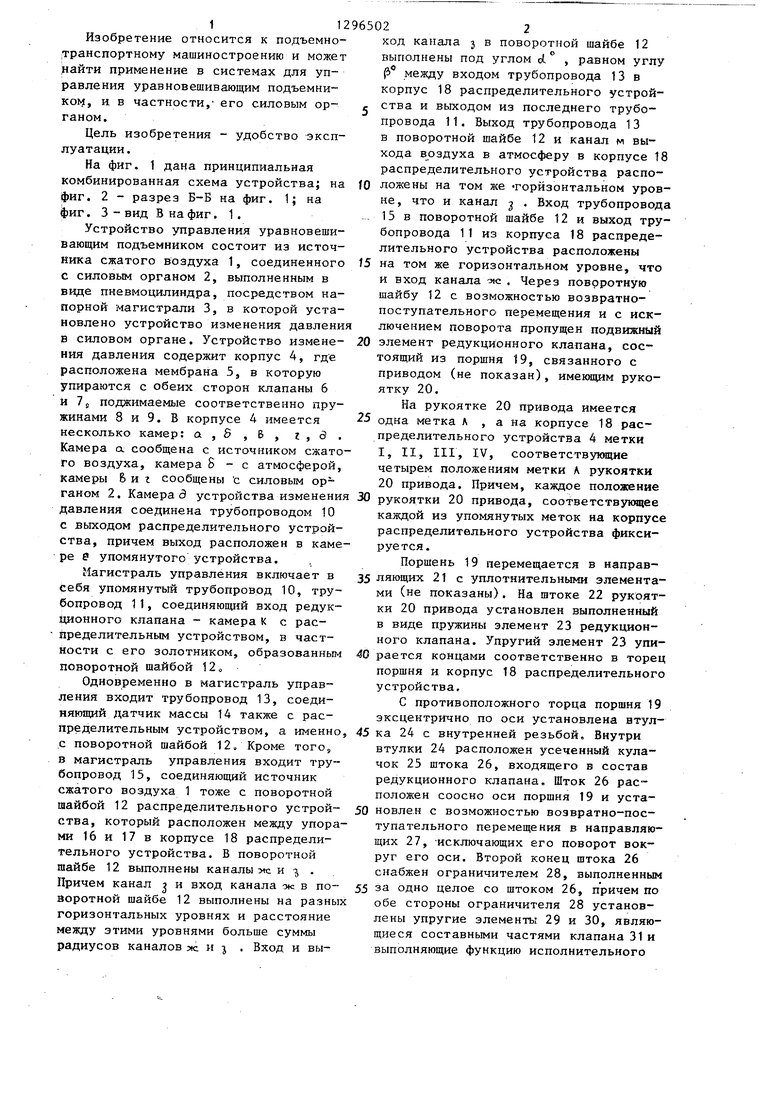
| название | год | авторы | номер документа |
|---|---|---|---|
| Электровоздухораспределитель тормоза железнодорожного транспортного средства | 1989 |
|
SU1717442A2 |
| Устройство для непрерывного впрыска топлива в двигатель внутреннего сгорания | 1980 |
|
SU1056919A3 |
| Устройство для управления уравновешивающим стреловым подъемником | 1988 |
|
SU1650561A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Зуботехническая пила | 1989 |
|
SU1648442A1 |
| Электровоздухораспределитель тормоза железнодорожного транспортного средства | 1989 |
|
SU1781109A1 |
| ЗАПОРНОЕ УСТРОЙСТВО К МАШИНАМррУ-?-] | 1973 |
|
SU378167A1 |
| Устройство для управления тормозом подъемной машины | 1988 |
|
SU1523511A1 |
| МОБИЛЬНЫЙ ИМПУЛЬСНЫЙ ПИТАТЕЛЬ | 2003 |
|
RU2245485C1 |
Изобретение относится к области подъемно-транспортного машиностроения, а именно к устройствам для управления уравновешивающим подъемником. Цель изобретения - удобство в эксплуатации. Устройство управления уравновешивающим подъемником содержит силовой орган, соединенный с двумя силовыми гидролиниями, в одной из которых установлены редукционный клапан с поршнем, втулкой и кулачком, датчик массы и золотниковое распределительное устройство с поворотной шайбой и с управляющей камерой усилителя мощности, рабочие камеры которого соответственно соединены с атмосферой и посредством второй силовой линии с источником сжатого воздуха. Грузом можно манипулировать путем cimoBoro воздействия руками на груз либо на подъемник.
Составитель А. Шмалько Редактор И. Сегляник Техред В.Кадар Корректор А. Обручар
Заказ 710/25
Тираж 721
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| Авторское свидетельство СССР № 914478, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
