Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления уравновешивающими стреловыми подъемниками.
Цель изобретения - повышение надежности.
На чертеже показано устройство, общий вид.
Устройство для управления подъемником содержит регулятор 1 давления, включающий в себя клапаны 2 и 3, механически связанные друг с другом посредством толкателей 4 и мембраны 5, образующей в корпусе регулятора 1 камеры слежения 6 и управления 7. Источник 8 сжатого воздуха сообщен через клапан 3 с полостью силового пневмоцилиндра 9, дополнительно сообщенной через клапан 2 с атмосферой. Датчик 10 массы груза включает в себя клапан 11, посредством которого источник 8 сообщен с камерой 7, толкатель 12, соединенный с мембранами 13 и 14, образующими с корпусом камеры 15 и 16 управления
Толкатель 12 выполнен с каналом 17, сообщающим полость клапана 11 с камерой 15. Полость клапана 11 и камера 16 сообщены друг с другом, а камера 15 - с атмосферой. Рукоятка 18 управления установлена в корпусе датчика 10 на оси и взаимодействует с толкателем 12 и мембранами 13 и 14. Между подсетью пневмоцилиндра 9 и камерой 7 установлены последовательно соединенные редукционный клапан 19 и регулируемый дроссель 20, а параллельно им включен регулируемый дроссель 21. Датчик 10 выполнен с винтом 22 для взаимодействия на толкатель 12.
Устройство работает следующим образом.
Масса стрелы уравновешивается противовесом (не показано). Масса грузозахватного органа и масса датчика 10 уравновешиваются усилием пневмоцилиндра 9. Уравновешивание достигается по команде датчика 10.
При подъеме груза оператор указательным пальцем кисти руки воздействует на рукоятку 1 управления вверх. Толкатель 12, перемещаясь вниз, прогибает мембраны 13
и 14 и открывает клапан 11. Воздух через открытый клапан 11 поступает в камеру 16. Сила давления воздуха, действующая на мембрану 13 снизу, стремится переместить
толкатель 12 вверх, а сила давления воздуха в камере 16, действующая на мембрану 14 сверху, препятствует перемещению толкателя 12 вверх. Поскольку рабочие площади мембран 13 и 14 равны, то равны и силы
давления воздуха на эти мембраны. Толкатель 12 исвязанная с ним рукоятка 18управ- ления остаются разгруженными от действия упомянутых сил. Пневматический сигнал датчика 10 массы груза по магистрали управления поступает в камеру 7 управления регулятора 1 давления. Давление воздуха в камере 7 увеличивается, в результате чего мембрана 5 с толкателями 4 перемещается в сторону клапана 3 Клапан 3 открывается
и пропускает воздух в полость пневмоцилиндра 9.
Одновременно часть пневматического сигнала из камеры 7 через регулируемый дроссель 21 поступает в рабочую полость
пневмоцилиндра 9. Таким образом, в рабочей полости пневмоцилиндра 9 создается давление воздуха, необходимое для создания усилия, уравновешивающего суммарную массу грузозахватного органа с грузом
и датчика 10 массы груза. По приходу груза в заданную по высоте точку зоны обслуживания воздействие на рукоятку 18 управления прекращается. Клапан 11 датчика 10 массы груза под действием усилия пружины
переместит толкатель 12 вверх и запрет седло. Давление воздуха в камерах регулятора 1 давления выравнивается. Мембрана 5 придет в состояние равновесия, а клапан 3 закроется.
Груз, уравновешенный посредством пневмоцилиндра 9, перемещается в горизонтальной плоскости оператором за ручку 18.
При длительных перемещениях груза в
горизонтальной плоскости неизбежные утечки воздуха через уплотнения пневмоцилиндра 9 компенсируются датчиком 10 массы груза следующим образом.
Винтом 22 нагружают пружину и перемещают толкатель 12 вниз, клапан 11 открывается. Воздух из датчика 10 через камеру 7 регулятора 1 и регулируемый дроссель 21 поступает в рабочую полость пневмоцилин- дра 9. Усилия мембраны 5, развиваемого давлением воздуха в камере 7. недостаточно для открытия клапана 3.
При пускании груза оператор большим пальцем кисти руки воздействует на рукоят- ку 18 управления вниз, толкатель 12 отрывается от клапана 11 и открытым клапаном 17 сообщает датчик 10с атмосферой. Клапан 2 регулятора 1 давления открывается и пропускает воздух из пневмоцилиндра 9 в атмос- феру. По окончании воздействия на рукоятку 18 воздух из рабочей полостипнев- моцилиндра 9 через дроссель 21 большого сопротивления поступает в камеру 7 управления и по управляющему входу - в настро- ечную камеру редукционного клапана 19. Редукционный клапан 19 выдает пневматический сигнал в виде уровня давления, который поступает в камеру 7 и обеспечивает быстрое выравнивание давления воздуха в камерах 6 и 7, при этом клапан 2 закроется
Устройство может быть использовано в зоне высоких температур и в помещениях с запыленной атмосферой.
Формула изобретения Устройство для управления уравновешивающим стреловым подъемником, содержащее регулятор давления, включающий в себя по крайней мере два клапана, механически связанных друг и другом посредством толкателя, соединенного с мембраной, образующей в корпусе регулятора камеры слежения и управления, источник сжатого воздуха, сообщенный через один клапан регулятора с полостью силового пневмоцилиндра, дополнительно сообщенного через другой клапан с атмосферой, датчик массы груза, включающий в себя клапан, посредством которого источник сжатого воздуха сообщен с камерой управления регулятора, толкатель, прижатый к клапану, соединенный с мембраной и рукояткой управления и выполненный с каналом, сообщающим одну камеру управления с атмосферой, а также регулируемые дроссели, отличающееся тем. что, с целью повышения надежности, оно снабжено редукционным клапаном, включенным последовательно с одним регулируемым дросселем между камерой управления регулятора и полостью пневмоцилиндра. дополнительно сообщенными друг с другом посредством другого регулируемого дросселя, причем датчик массы груза включает в себя дополнительную мембрану, соединенную с толкателем, а другая камера управления датчика сообщена с камерой его клапана
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| Устройство для управления уравновешивающим стреловым подъемником | 1983 |
|
SU1177259A1 |
| Система управления уравновешивающим подъемником | 1984 |
|
SU1199738A2 |
| Манипулятор с уравновешиванием груза | 1989 |
|
SU1705229A1 |
| Устройство для управления пневматическим уравновешивающим стреловым подъемником | 1984 |
|
SU1328279A1 |
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления стреловыми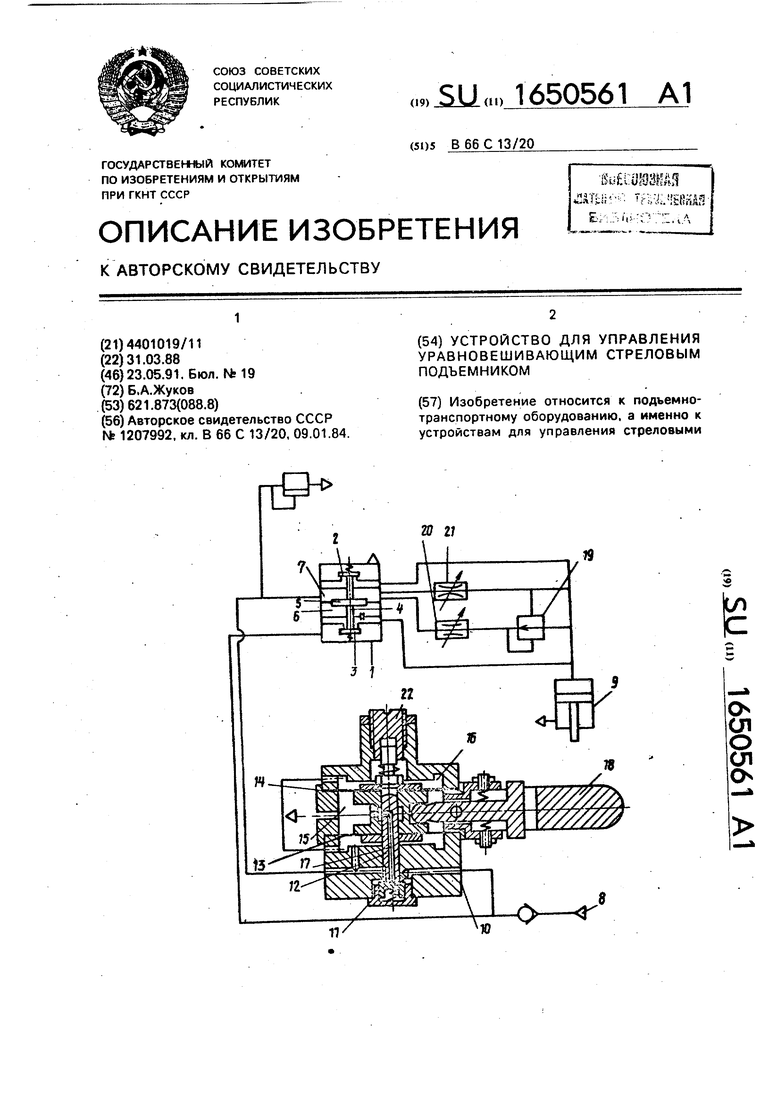
| Система управления уравновешивающим подъемником | 1984 |
|
SU1207992A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
