Известные способы уменьшения статической ошибки регулирования имеют тот недостаток, что при возвраш,ении следящей системы в рабочую точку области регулирования система оказывается разрегулированной.
Предлагаемый способ позволяет уменьшить постоянную составляюш,ую погрешности регулирования в заранее заданной, например нулевой, точке области регулирования, а также предотвраш,ает разрегулировку системы при возврате ее в эту точку. Это достигается тем, что входной (управляюший) сигнал следяш,ей системы выбирают так, чтобы он проходил через заданную точку области регулирования н имел в этой точке, в среднем, одну и ту же крутизну как при переходе от положительной волны к отрицательной, так и наоборот. Выходной сигнал (сигнал обратной связи) должен отставать по фазе от входного (управляюш,его) сигнала не более чем на 180°. В процессе работы системы сравнивают сигнал обратной связи с входным сигналом и выделяют из сигнала обратной связи постоянную составляюшую, интегрируют ее и полученный корректирующий сигнал, пропорциональный значению этого интеграла, вводят в систему.
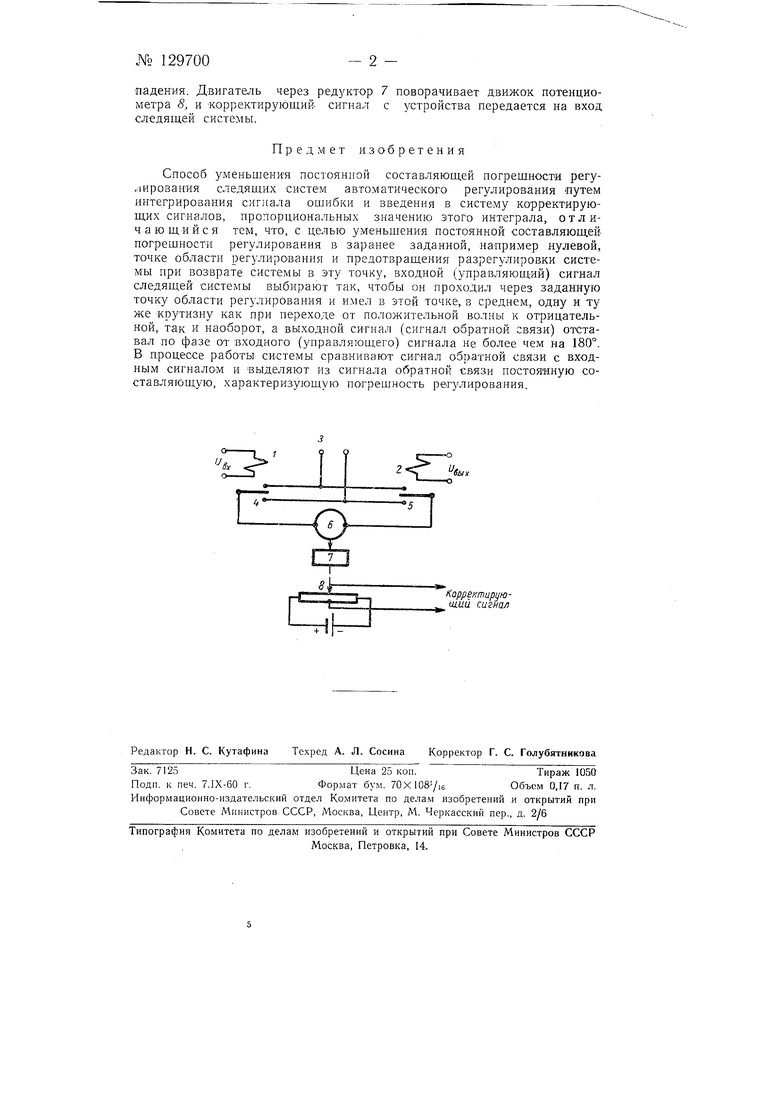
Для замыкания и размыкания цепей в зависимости от полярности сигналов и„. и U j- применены поляризованные реле / и 2 (см. чертеж). Схема несовпадения, которая в этом случае получается путем переключения контактов реле 1 и 2, образует цепь для прохождения тока от другого источника 3 при несовпадении знаков И,. и Uвы., причем полярность или фаза подключения источника зависит от знака перехода сигналов U. и f/«b,.v через опорный сигнал. К якорям 4 5 реле подключается двигатель 6 постояиного (или переменного) тока. Этот двигатель и будет осуществлять интегрирование сигналов весовпадения. Двигатель через редуктор 7 поворачивает движок потенциометра S, и Корректирующий, сигнал с устройства передается на вход следящей системы.
изобретения
Способ уменьшения постоянной составляющей погрешности регулирования следящих систем автоматического регулирования путем интегрирования сигнала ошибки и введения в систему корр-ектирующих сигналов, пропорциональных значению этого интеграла, отличающийся тем, что, с целью уменьщения постоянной составляющей потрешности регулирования в заранее заданной, например нулевой, точке области регулирования и предотвращения разрегулировки системы при возврате системы в эту точку, входной (управляющий) сигнал следящей системы выбирают так, чтобы он проходил через заданную точку области регулирования и имел в этой точке, в среднем, одну и ту же крутизну как при переходе от положительной волны к отрицательной, так и наоборот, а выходной сигнал (сигнал обратной связи) отставал по фазе от входного (управляющего) сигнала не более чем на 180°. В процессе работы системы сравнивают сигнал обратной связи с входным сигналом и выделяют из сигнала обратной связи постоянную составляющую, характеризующую погрешность регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический решающий элемент | 1960 |
|
SU142047A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Статоскоп | 1984 |
|
SU1278636A1 |
| Привод наведения | 2021 |
|
RU2767023C1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| СПОСОБ УПРАВЛЕНИЯ МОСТОВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 1993 |
|
RU2093949C1 |
| АНАЛОГОВЫЙ ИНТЕГРАТОР | 2014 |
|
RU2571618C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
Корректирию иии сигнал
