(54) АВТОМАТ ДЛЯ РАЗБРАКОВКИ РЕЛЕ

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для разбраковки реле | 1985 |
|
SU1252835A1 |
| Автомат коммутации и разбраковки | 1974 |
|
SU560278A1 |
| ЛИНИЯ НАМОТКИ КАТУШЕК РЕЛЕ | 2004 |
|
RU2262479C1 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| АППАРАТ ДЛЯ МЕТАНИЯ ТЕННИСНЫХ МЯЧЕЙ | 1972 |
|
SU347066A1 |
| Устройство для механических испытаний и разбраковки полупроводниковых приборов | 1979 |
|
SU911655A1 |
| Установка для сортировки по весу шарообразных изделий | 1980 |
|
SU910233A1 |
| Устройство для контроля и разбраковкиРАдиОэлЕМЕНТОВ | 1979 |
|
SU805451A1 |
| АВТОМАТ ДЛЯ МЕХАНИЧЕСКИХ ИСПЫТАНИЙ И РАЗБРАКОВКИ ПОЛУПРОВОДНИКОВЫХ ДИОДОВ | 1967 |
|
SU224689A1 |
| Бесцентровошлифовальный станок | 1983 |
|
SU1155424A1 |

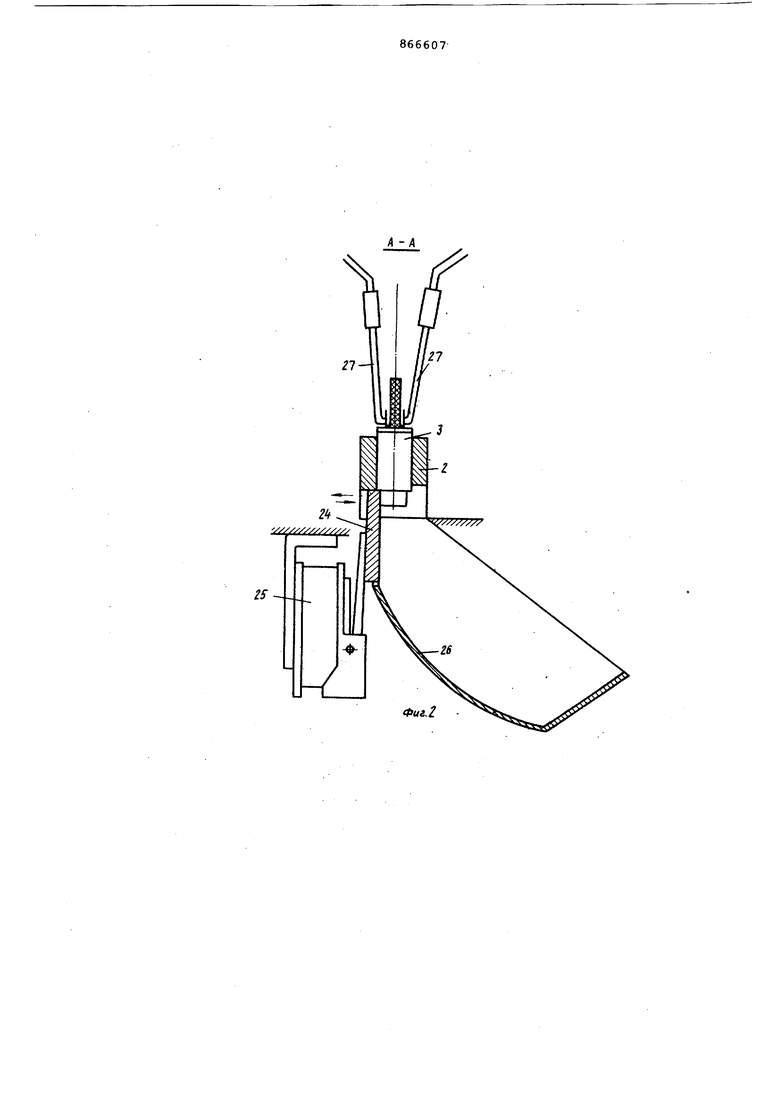
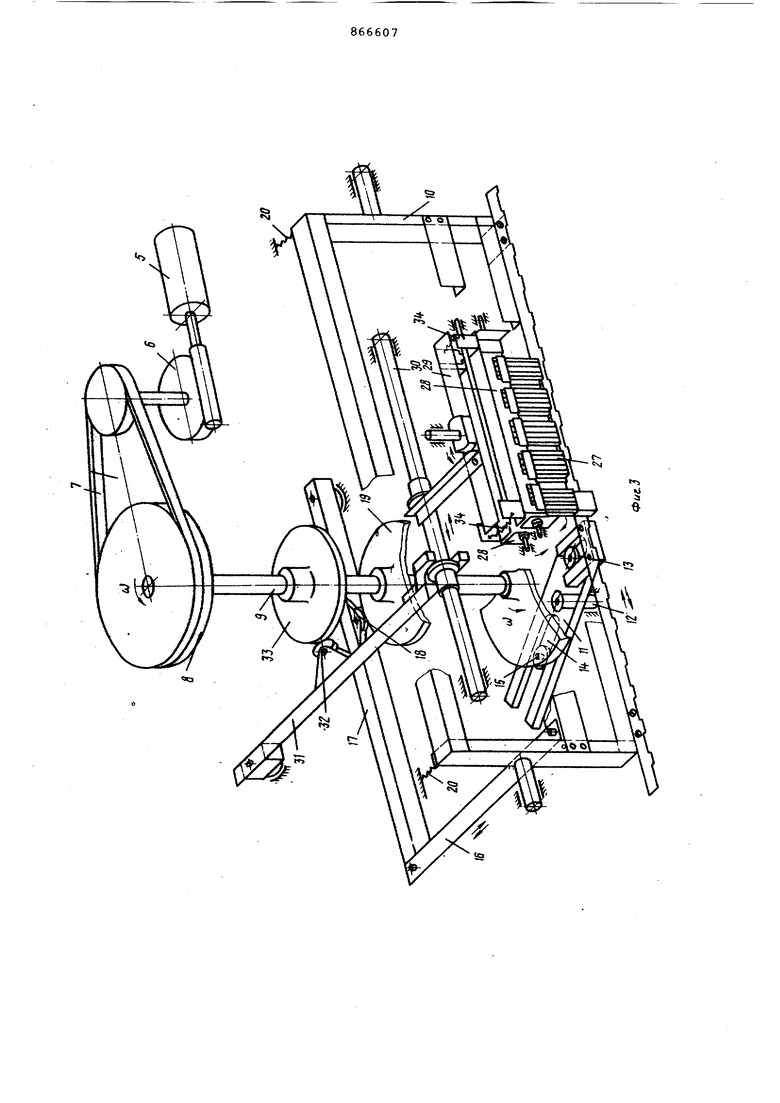
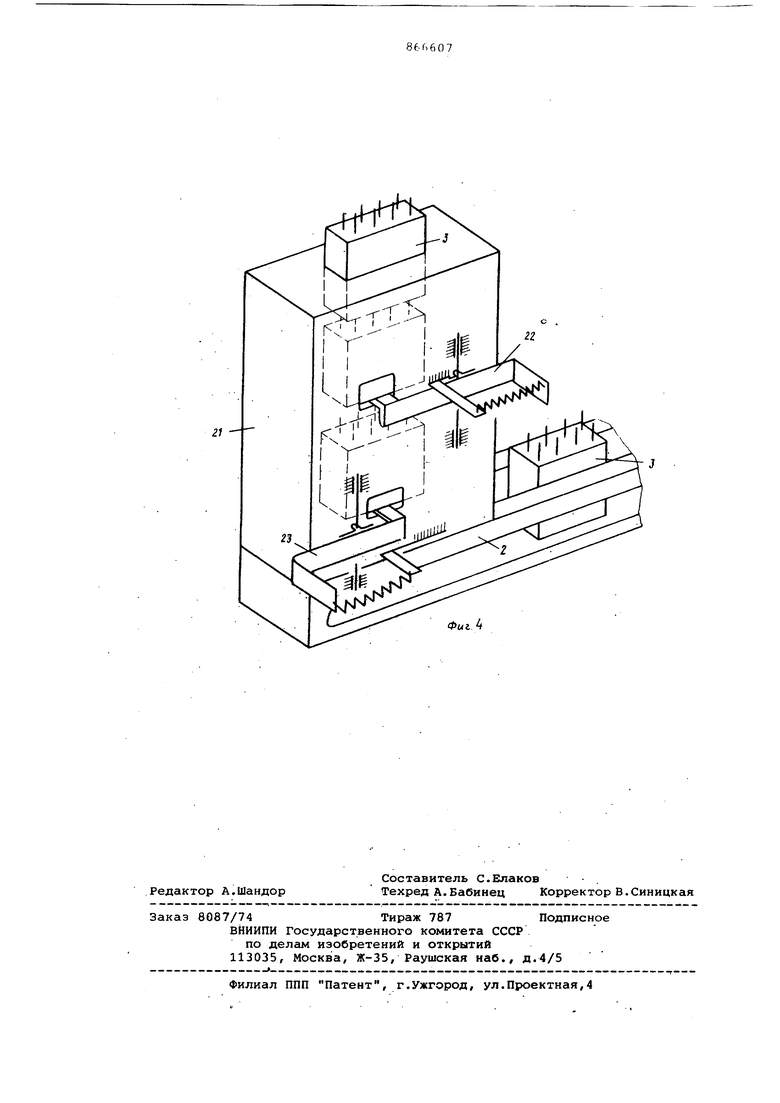
Изобретенче относится к электроаппаратостроению, а более конкретно к устройствам для разбраковки реле по электрическим параметрам и может быть использовано в радиодеталестроении, приборостроении для автоматичес кой разбраковки изделий. Известно устройство для разбраковки радиодеталей, содержащее загрузочные и разгрузочные механизмы, испыта тельно-сортировочные каналы в вид транспортирующих дисков с гнездами, механизм раскладки разбракованных деталей в тару, контактно-зажимные механизг л с блоком подключения , блок изме рения параметров,логический блок,приводной механизм и коммутатор каналовЩ Недостатком устройства является сложность его кинематической схемы транспортировки и подключения испытуемых изделий. Наиболее близким к изобретению, по технической сущности является автомат коммутации и разбраковки, содержащий блок управления, основание, на котором установлена неподвижная направляющая, механизм последователь ной подачи реле, связанный с приводным механизмом, блоки подключающих контактов, расположенные вдоль непод вижной направляющей и соединенные с блоком управления, механизм загрузки с отсекателсм и механизм разгрузки 2. Однако в известном устройстве реле перемещается по направляющей за счет силы тяжести и,при-перемещении упомянутого реле от отсекателя в механизм последовательной подачи возможно заклинивание реле в механизме последовательной подачи, что снижает надежность работы автомата и eio производительность . Цель изобретения - повышение надежности работы устройства. Поставленная цель достигается тем, что в автомате механизм загрузки снабжен дополнительным отсекателем, а неподвижная направляющая выполнена Ь виде горизонтального желоба с расположенными под блоками подключающих контактов отверстиями для размещения в них механизмов разгрузки, причем механизм разгрузки выполнен Б виде затвора с электромагнитным приводом, соединенным с блоком управления, а механизм последовательной подачи реле выполнен в виде грейферного механизма для перемещения реле вдоль неподвижной направляющей, при этом грейферный механизм кинемашически связан с основным и дополнительным отсекателями механизма загрузки. На фиг.1 изображена схема общего вида автомата для разбраковки реле; на фиг,2 - разрез А-А на фиг.1; на фиг.З - кинематическая схема автомата; на фиг.4 - схематическое изображение механизма загрузки. На основании 1 автомата для разбр ковки реле смонтирован приводной механизм, неподвижная направляющая в виде горизонтального желоба 2, для проверяемых реле 3, блоки подключающих контактов 4 для подключения реле 3 к блоку управления (не показан Приводной механизм (фиг.З) содержит электродвигатель 5, редуктор Ь, переменную передачу 7, фрикционную предохранительную муфту 8, соединенную с ведущим валом 9. Механизм последовательной подачи реле выполнен в виде грейферного механизма, который содержит грейфер 10, кулису 11, сидящую на оси 12 и связанную с грей фером 10 посредством пальца 13, входящим в паз грейфера 10. Кулиса 11 связана с кривошипом 14 приводного механизма при помощи пальца 15, входящего в паз кулисы 11. Кривошип 14 закреплен на ведущем валу 9. Грейфер 10 через тягу 16, рычаг 17 с роликом 18 связан с кулачком 19, также расположенным на ведущем валу У. Пружины 20 поджимают грейфер 10 к кулачку 19. На горизонтальном желобе 2 (,фиг.4) установлен механизм загруз ки 21 реле 3 с основным и дополнител ным .отсекателями 22 и 23. Каждый ме ханизм разгрузки содержит затвор 24 с электромагнитным приводом 25 и рас положен в отверстии желоба 2 под сог ответствующим ему блоком подключающих контактов 4. Под механизмом раз грузки расположен лоток 26. Подключение реле 3 к блоку управления осуществляется пружинными контактами 27 блоков подключающих контактов 4, закрег1ленными на рычагах 2В. Рычаги 28 с помощью рычага 29, тяги 30, рычага 31 с роликом 32 и куличк 33 связаны с ведущим валом 9. Пружины 34 поджимают рычаги 28 к кулач ку 33. Включение и отключение блока управления осуществляется герконами 35 1фиг.1), срабатывающими от постоянных магнитов 36, закрепленных на ведущем валу 9. Автомат работает следующим образо Движение с электродвигателя 5, через редуктор 6, переменную передачу 7 и фрикционную предохранительную муфту 8 передается на ведущий вал 9. С вала 9 с помощью кривошипа 14 с пальцем 15 вращательное движение передается на кулису 11 и трансформируется в качательное движение кулисы 11 относительно оси 12. Через палец 13 кулисы 11 усилие передается грейферу 10, совершающему возвратно-поступательное движение. Кулачок 19 через рычаг 17 с роликом 18 и тягу 16 также передает усилие грейферу 10, обеспечивая его зацепление с находящимися в желобе 2 реле 3 в фазе рабочий ход и вывод из зацепления в фазе обратный ( холостой) ход. Кулачок 33 через рычаг 31 с роликом 32, тягу 30, рычаг 29 передает усилие на рычаги 28 с закрепленными на них пружинными контактами 27 и обеспечивает подключение проверяемых реле 3 к блоку управления на время измерения электрических параметров. Проверяемые реле 3 подаются в механизм загрузки 21 и удерживаются отсекателями 22. Грейфер 10 в конце фазы рабочий ход отводит отсекатель 22 и реле 3 под действием собственного веса перемещается вниз до отсекателя 23. В конце фазы обратный ( холостой ход грейфер 10 отводит отсекатель 23 и реле 3 перемещается в желоб 2. В конце фазы обратный(холостой) ход грейфер 10 под действием кулачка 19 входит во взаимодействие с реле 3, находящимися в желобе 2 и перемещает их на величину своего хода. В конце фазы рабочий ход грейфер 10 под действием этого же кулачка 19 выводится из взаимодействия с реле 3, а пружинные контакты 27 подключаются к выводам реле 3. После окончания измерения пружинные контакты 27 отводятся от выводов реле 3, грейфер 10 входит во взаимодействие с реле 3, находящимися в желобе 2, и цикл повторяется. В случае несоответствия прореряемого параметра требуемой величине, блок управления подает сигнал на электромагнит 25, который перемещает затвор 24 и реле 3, после разведения пружинных.контактов 27 под действием собственного веса падает в лоток 26. После этого затвор 24 возвращается в исходное положение. Формула изобретения Автомат для разбраковки реле, содержащий блок управления, основание , на котором установлена неподвижная направляющая, механизм последовательной подачи реле, связанный с приводным механизмом, бЛоки подключающих контактов, расположенные вдоль неподвижной направляющей и соединенные с блоком управления, механизм загрузки с отсекателем и механизм разгрузки, отличающ и и с я тем, что, с целью повышения надежности работы в нем механизм загрузки снабжен ополнительным отсека- елем, а неподвижная направлякедая выполнена в виде горизонтального желоба с расположенньми под блоками подключающих контактов отверстиями для размещения в них механизмов разгрузки, причем механизм разгрузки выполнен в виде затвор а с электромагнитным при водом, сое- диненным с блоком управления, а мехаг низм последовательной подачи реле выполнен в виде грейферного механизма для перемещения реле вдоль неподвижной направляющей, при этом грейферный механизм кинематически связан .с основ ным и дополнительным отсекателями механизма загрузки.
Источники информации, принятые во внимание при экспертизе
