i Изобретение относится к робототехнике и может быть использовано в манипуля- торах с большим числом степеней подвижности.
Целью изобретения является повышение надежности фиксации шарнира.
На чертеже изображен шарнир, общий вид.
Шарнир манипулятора состоит из двух установленных с возможностью поворота частей 1 и 2, на одной из которых 1 установлено тело качения, например ролик 3, а на наружной цилиндрической поверхности части 2 шарнира выполнена проточка, закрытая эластичной оболочкой 4, образующая полост 5 заполненную электрореологической жидкостью. На дне полости 5 и на эластичной оболочке 4 расположены электроды 6 и 7 соответственно, покрытые слоем диэлектрика. Шарнир манипулятора работает следующим образом.
При отсутствии напряжения на электро- дах 6 и 7 и вращении частей 1 и 2 относительно друг друга ролик 3, перекатываясь по поверхности электрода 7 и упруго деформируя последний вместе с оболочкой 4, ; вызывает перетекание электрореологической жид кости внутри полости 5. Свободное перетекание электрореологической жидкости внутри полости 5 не препятствует вращению частей 1 и 2 шарнира. При необходимости затормозить их относительное вращение подают напряжения на электроды 6 и 7. Реологические свойства жидкости, заполняющей полость 5, изменяются, уменьщая скорость ее протекания внутри этой полости. Вращение замедляется.
При необходимости зафиксировать части 1 и 2 шарнира увеличивают напряже
0
5
кие на электродах до полного замерзания электрореологической жидкости. Затвердев, электрореологическая жидкость препятствует деформации оболочки 4 и, следовательно, лишает ролик 3 возможности перекатываться по поверхности электрода 7, а часть 1 лишается возможности поворота относительно части 2 шарнира 1. Шарнир зафиксирован в заданном положении.
Снабжение полости для электрореологической жидкости эластичной оболочкой позволяет падежно удерживать электрореологическую жидкость в межэлектродном пространстве, одновременно изолируя узлы трения от контакта с электрореологической жидкостью, являющейся абразивом по своему составу, поскольку содержит твердые взвешенные частицы.
Формула изобретения
Шарнир манипулятора, состояший из двух установленных с возможностью поворота друг относительно друга частей, в одной из которых выполнена полость, в которой установлены два электрода, заполненная электрореологической жидкостью, отличающийся тем, что, с целью повышения надежности, он снабжен по крайней мере одним телом качения, установленным на одной из частей шарнира, а полость образована выполненной на наружной цилиндрической поверхности другой части шарнира проточкой, закрытой введенной в устройство эластичной оболочкой, на которой закреплен один из электродов, при этом тело качения установлено с возможностью взаимодействия с этой оболочкой.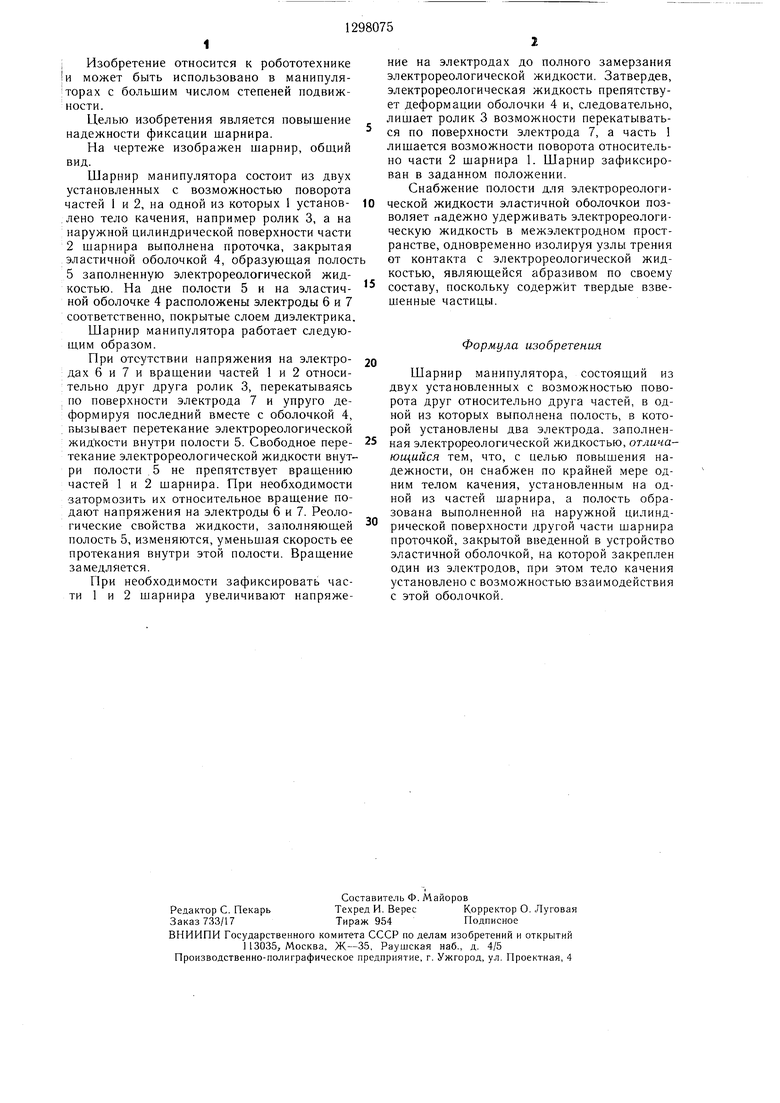
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1989 |
|
SU1673438A1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| Манипулятор | 1989 |
|
SU1673429A1 |
| Способ реконфигурации многоподвижного звена манипулятора | 1988 |
|
SU1678603A1 |
| Искусственная мышца | 1989 |
|
SU1602742A1 |
| Модуль манипулятора | 1985 |
|
SU1283086A1 |
| Электрическое двигательное устройство | 1989 |
|
SU1697235A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| ПРОТЕЗ БЕДРА | 2016 |
|
RU2617268C1 |
| Шарнирный механизм манипулятора | 2020 |
|
RU2756279C1 |
Изобретение относится к робототехнике и может быть использовано в манипуляторах с большим числом степеней подвижности.- Целью изобретения является повышение надежности фиксации шарнира. При взаимном повороте частей 1 и 2 шарнира ролик 3 обкатывается по поверхности полости 5, образованной эластичной оболочкой 4 с электродом 7 на ее поверхности и проточкой, выполненной в части 2 шарнира, на дне которой расположен электрод 6. При этом электрод 7 и о болочка 4 деформируются, вызывая перетекание электрореологической жидкости, которой заполнена полость 5. При необходимости затормозить относительное враш,ение частей 1 и 2 подают напряжение на электроды 6 и 7, увеличивая тем самым вероятность электрореологической жидкости до полного ее замерзания. 1 ил. (/ t СО 00 о ел
| Сустав манипулятора | 1979 |
|
SU844271A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
