±
00 СП 4
to to
Изобретение относится к машиностроению, в частности к манипуляторам для механизации технологических процессов, содержащих подъемно-транспортные операции.
Цель изобретения - повышение грузоподъемности и снижение материалоемкости за счет уменьшения количества приводов.
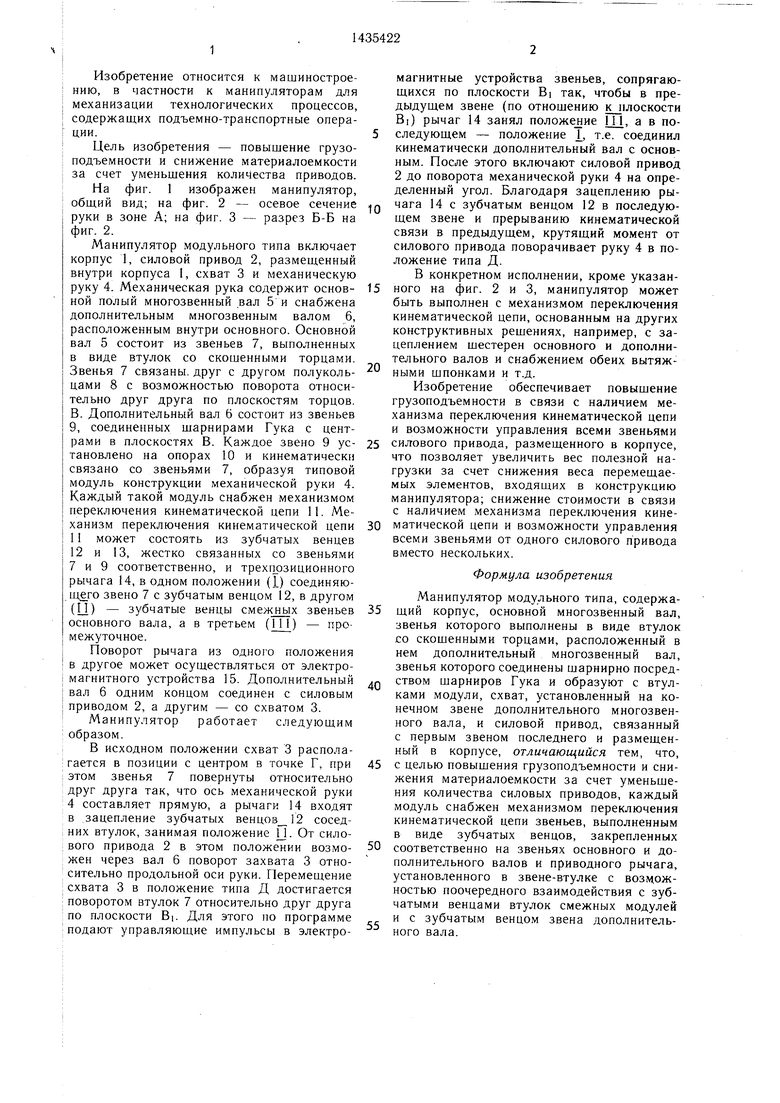
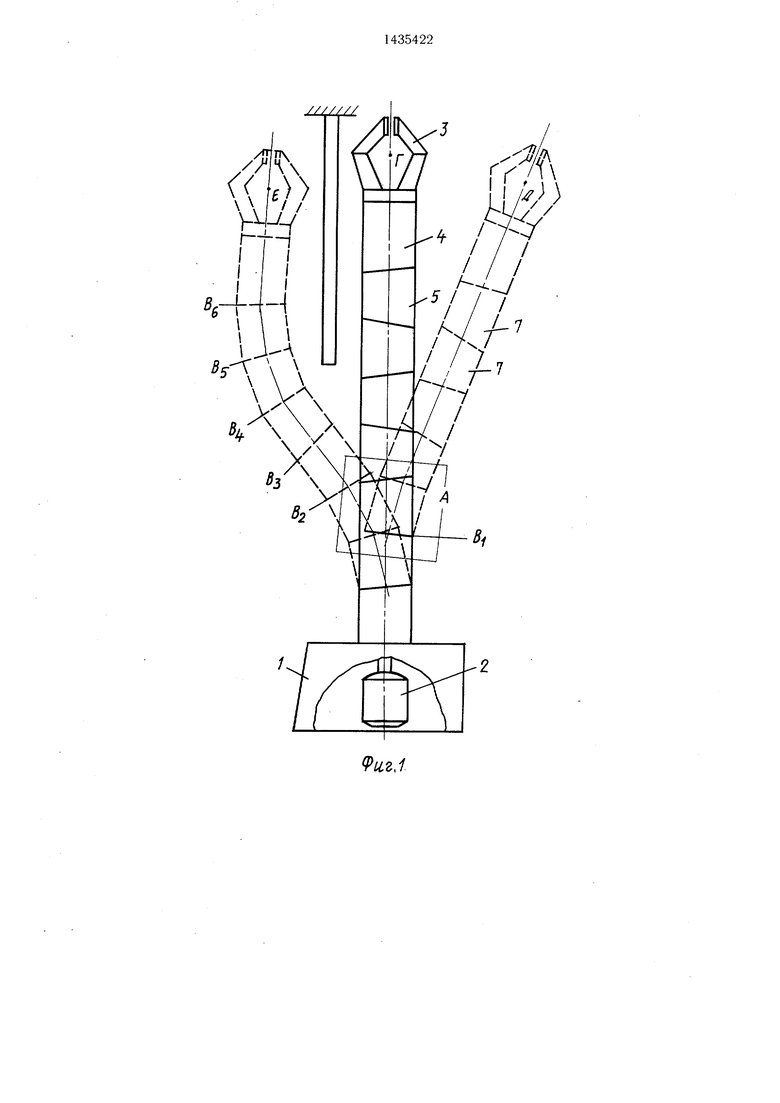
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - осевое сечение руки в зоне А; на фиг. 3 - разрез Б-Б на фиг. 2.
Манипулятор модульного типа включает корпус 1, силовой привод 2, размещенный внутри корпуса 1, схват 3 и механическую руку 4. Механическая рука содержит основной полый многозвенный вал 5 и снабжена дополнительным многозвенным валом 6, расположенным внутри основного. Основной вал 5 состоит из звеньев 7, выполненных в виде втулок со скошенными торцами. Звенья 7 связаны, друг с другом полукольцами 8 с возможностью поворота относительно друг друга по плоскостям торцов.
8.Дополнительный вал 6 состоит из звеньев
9,соединенных шарнирами Гука с центрами в плоскостях В. Каждое звено 9 установлено на опорах 10 и кинематически связано со звеньями 7, образуя типовой модуль конструкции механической руки 4. Каждый такой модуль снабжен механизмом переключения кинематической цепи 11. Механизм переключения кинематической цепи
11может состоять из зубчатых венцев
12и 13, жестко связанных со звеньями 7 и 9 соответственно, и трехгюзиционного рычага 14, в одном положении (1) соединяю- щего звено 7 с зубчатым венцом 12, в другом (И) - зубчатые венцы звеньев основного вала, а в третьем (111) - промежуточное.
Поворот рычага из одного положения в другое может осуществляться от электромагнитного устройства 15. Дополнительный вал 6 одним концом соединен с силовым приводом 2, а другим - со схватом 3.
Манипулятор работает следующим образом.
В исходном положении схват 3 располагается в позиции с центром в точке Г, при этом звенья 7 повернуты относительно друг друга так, что ось механической руки 4 составляет прямую, а рычаги 14 входят в зацепление зубчатых венцов 12 соседних втулок, занимая положение П. От силового привода 2 в этом положении воз.мо- жен через вал б поворот захвата 3 относительно продольной оси руки. Перемещение схвата 3 в положение типа Д достигается поворотом втулок 7 относительно друг друга по плоскости BI. Для этого по программе подают управляющие импульсы в электромагнитные устройства звеньев, сопрягающихся по плоскости BI так, чтобы в предыдущем звене (по отнощению к плоскости BI) рычаг 14 занял пoлoжeJиe 111, а в последующем - положение 1, т.е. соединил кинематически дополнительный вал с основным. После этого включают силовой привод 2 до поворота механической руки 4 на определенный угол. Благодаря зацеплению рыQ чага 14 с зубчатым венцом 12 в последующем звене и прерыванию кинематической связи в предыдущем, крутящий момент от силового привода поворачивает руку 4 в положение типа Д.
В конкретном исполнении, кроме указан5 ного на фиг. 2 и 3, манипулятор может быть выполнен с механизмом переключения кинематической цепи, основанным на других конструктивных решениях, например, с зацеплением шестерен основного и дополнительного валов и снабжением обеих вытяж ными шпонками и т.д.
Изобретение обеспечивает повышение грузоподъемности в связи с наличием механизма переключения кинематической цепи и возможности управления всеми звеньями
5 силового привода, размещенного в корпусе, что позволяет увеличить вес полезной нагрузки за счет снижения веса перемещаемых элементов, входящих в конструкцию манипулятора; снижение стоимости в связи с наличием механизма переключения кине0 матической цепи и возможности управления всеми звеньями от одного силового привода вместо нескольких.
Формула изобретения
Манипулятор модульного типа, содержа5 щий корпус, основной многозвенный вал, звенья которого выполнены в виде втулок со скошенными торцами, расположенный в нем дополнительный многозвенный вал, звенья которого соединены шарнирно посредQ ством шарниров Гука и образуют с втулками модули, схват, установленный на конечном звене дополнительного многозвенного вала, и силовой привод, связанный с первым звеном последнего и размещенный в корпусе, отличающийся тем, что,
5 с целью повышения грузоподъемности и снижения материалоемкости за счет уменьшения количества силовых приводов, каждый модуль снабжен механизмом переключения кинематической цепи звеньев, выполненным в виде зубчатых венцов, закрепленных
0 соответственно на звеньях основного и дополнительного валов и приводного рычага, установленного в звене-втулке с возможностью поочередного взаимодействия с зубчатыми венцами втулок смежных модулей и с зубчатым венцом звена дополнитель5
ного вала.
///////
//
«
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1985 |
|
SU1298076A1 |
| Рука манипулятора | 1983 |
|
SU1138312A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| Захватное устройство | 1988 |
|
SU1521584A1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Устройство для изготовления тонкостенных профилей | 1985 |
|
SU1319967A1 |
Изобретение относится к области машиностроения, в частности к манипуляторам для механизации технологических процессов, содержащих подъемно-транспортные операции. Целью изобретения является повышение грузоподъемности и снижение материалоемкости за счет уменьшения количества приводов. В корпусе установлен силовой привод, а на корпусе размеш,ена механическая рука. Механическая рука содержит основной полый многозвенный вал 5 и размещенный в нем дополнительный многозвенный вал 6. Основной вал 5 состоит из звеньев 7, выполненных в виде втулок со скошенными торцами. Дополнительный вал 6 состоит из звеньев 9, соединенных шарнирами Гука с центрами в плоскостях В. Каждое звено 9 установлено на опорах 10 и кинематически связано со звеньями 7, образуя типовой модуль конструкции механической руки. Каждый модуль снабжен механизмом переключения кинематической цепи 11, состоящим из зубчатых венцов 12 и 13, жестко связанных со звеньями 7 и 9 соответственно, и трехпозици- онного рычага 14, в одном положении (Т) соединяющего звено 7 с зубчатым венцом 12, в другом (И) - зубчатые венцы 13 g смежньп звеньев основного вала, а в тре- тьем (111) - промежуточное. 3 ил.
(Pu,z,t
| Шарнир манипулятора | 1983 |
|
SU1138317A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
