Изобретение относится к машиностроению, а именно к манипуляторам (промышленным роботам), предназначенным преимущественно для загрузки станков.
Известно манипулирующее устройство, механизм вращения захвата которого состоит из реверсивного пневмодвигателя, связанного зубчатой передачей с валом, несущим захватное устройство. Механизм вращения снабжен гидравлическими демпферами, срабатывающими при соприкосновении с упорами в крайних точках позиционирования 1.
Недостатком данного устройства является отсутствие промежуточных точек позиционирования, что сужает его технологические возможности.
Известно также манипулирующее устройстЕзо, содержащее вал с захватом, привод, гидрораспределитель с подпружиненным золотником и расположенный на валу кулачок, связанный с золотником гидрораспределителя 2.
К недостаткам указанного устройства относятся ограниченные технологические возможности манипулирования деталями большой массы.
Цель изобретения - расширение технологических возможностей устройства путем обеспечения возможности манипулирования деталями большой массы.
Для достижения указанной цели манипулирующее устройство, содержащее вал с захватом, привод, гидрораспределитель с подпружиненным золотником и расположенный на валу кулачок, связанный с золотником гидрораспределителя, снабжено рычагом и механизмом управления, выполненным в виде тяги и гидроцилиндра со штоком, имеющим ступенчатую часть, причем кулачок имеет профилированные участки, а количество ступеней штока гидроцилиндра механизма управления равно количеству профилированных участков кулачка, при этом тяга механизма управления расположена свободно на ступенчатрй части щтока гидроцилиндра, а рычаг связан с тягой механизма управления и расположен с возможностью взаимодействия с кулачком и с золотником гидрораспределителя.
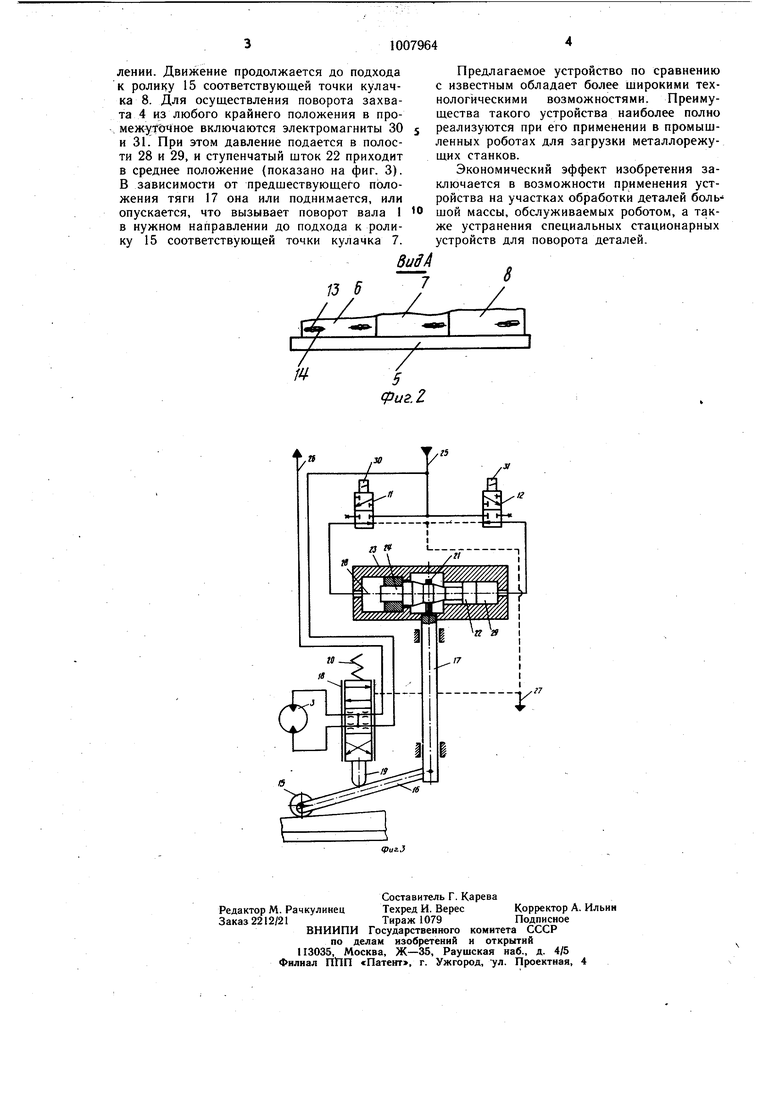
На фиг. 1 показано манипулирующее устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - принципиальная гидравлическая схема устройства.
Вал 1 (фиг. 1 и 2) манипулирующего устройства помешен с возможностью поворота в корпусе 2 и связан с гидромотором 3. К концу вала 1 жестко крепятся захват 4 и фланец 5 с кулачками 6-8. К корпусу 2 крепится также гидропанель 9, на которой закреплен механизм 10 управления и связанные с ним гидрораспределители 11 и 12.
Кулачки 6-8 крепятся к фланцу 5 винтами 13 с возможностью перестановки за счет прорезей 14. С кулачками контактирует ролик 15, установленный на конце рычага 16, другой конец которого шарнирно связан с нижним концом тяги Г7.
В панели 9 помещен дросселирующий распределитель 18 (фиг. 3), золотник 19 которого поджат пружиной 20 к средней части рычага 16. Распределитель 18 гидравлически связан с гидромотором 3. Тяга 17 на верхнем конце имеет серьгу 21, которая опирается на ступенчатую часть штока 22 гидроцилиндра 23 с фиксированным промежуточным положением, снабженного плавающим поршнем 24 (ступенчатым штоком).
5
К гидропанели 9 подходят напорная 25, сливная 26 и дренажная 27, магистрали, связанные с дросселирующим распределителем 18, а также с распределителями 11 и 12. Последние соединены с полостями 28 и 29
0 гидроцилиндра механизма 10 управления. Полость 29 имеет диаметр меньше, чем полость 28, но больше, чем диаметр отверстия плавающего поршня 24. Распределители 11 и 12 снабжены электромагнитами 30 и 31.
5
Устройство работает следующим образом.
Для осуществления поворота захвата 4 в какое-либо крайнее положение в зависимости от требуемого направления поворота
0 включают один из электромагнитов 30 или 31. При включении электромагнита 30 распределитель 11 соединяет полость 28 цилиндра механизма 10 управления с напорной магистралью 25. При этом щток 22 перемещается в крайнее правое положение, серьга 21
5 тяги 17 скользит по его ступенчатой части и перемещается в осевом направлении вверх. Перемещение тяги 17 вызывает смещение конца рычага 16, при котором меняется положение золотника 19 по отношению к ку0лачкам, что приводит к соединению напорной и -сливной магистралей с соответствующими каналами гидромотора 3 и вызывает поворот вала 1 вместе с захватом 4, а также фланцем 5 с кулачками. Движение продолжается до подхода кулачка 6 к ролику 15
5 рычага 16. Скос кулачка 6 опускает рычаг и тем самым возвращает золотник 19 в исходное положение. В процессе этого перемещения золотника происходит плавное снижение скорости вала и его остановка.
0
При включении электромагнита 31 (электромагнит 30 выключен), с напорной магистралью соединяется полость 28, ступенчатый шток 22 перемещается влево, а серьга 21 - в крайнее нижнее положение. Ось рычага 16
5 опускается и золотник 19 за счет действия пружины 20 перемещается вниз по отношению к корпусу распределителя 18. Это вызывает поворот вала 1 в обратном направлении. Движение продолжается до подхода к ролику 15 соответствующей точки кулачка 8. Для осуществления поворота захвата 4 из любого крайнего положения в про, межугьчное включаются электромагниты 30 5 и 31. При этом давление подается в полости 28 и 29, и ступенчатый шток 22 приходит в среднее положение (показано на фиг. 3). В зависимости от предшествующего положения тяги 17 она или поднимается, или опускается, что вызывает поворот вала 1 О в нужном направлении до подхода к ролику 15 соответствующей точки кулачка 7.
Предлагаемое устройство по сравнению с известным обладает более широкими технологическими возможностями. Преимущества такого устройства наиболее полно реализуются при его применении в промышленных роботах для загрузки металлорежущих станков.
Экономический эффект изобретения заключается в возможности применения устройства на участках обработки деталей большой массы, обслуживаемых роботом, а также устранения специальных стационарных устройств для поворота деталей.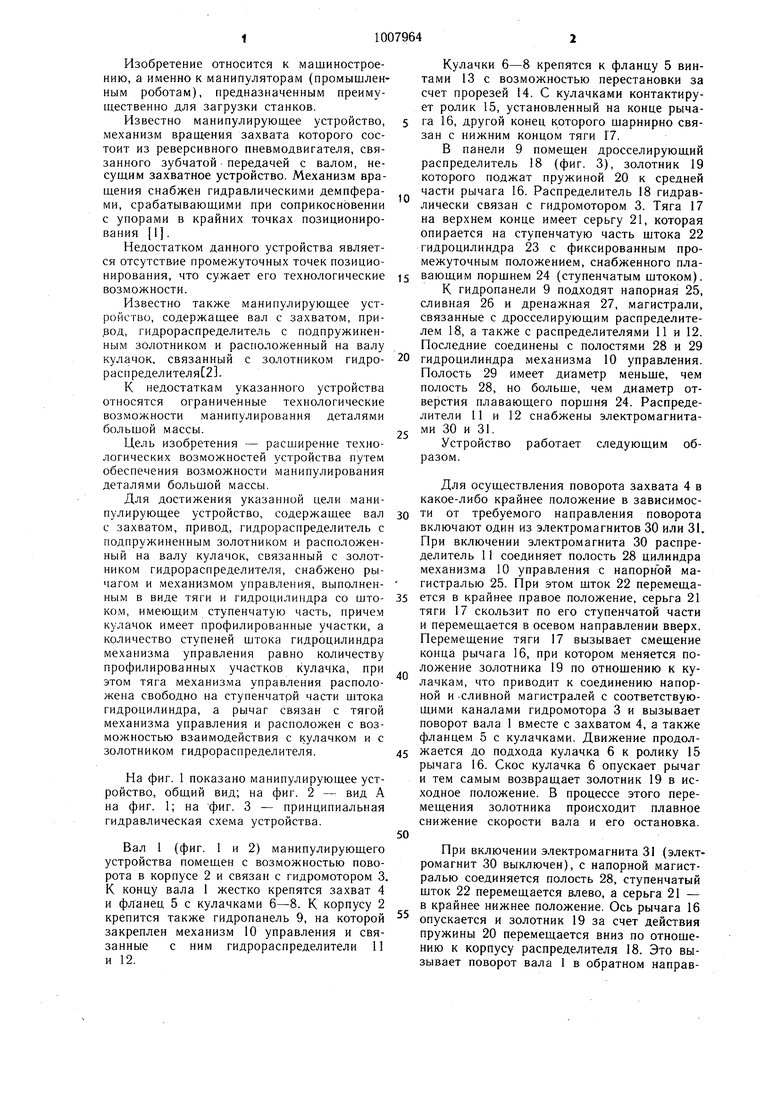
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод механизма поворота стрелового самоходного крана | 1985 |
|
SU1324992A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ ПРИВОДОМ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2179144C2 |
| Ключ для свинчивания и отвинчивания труб | 1984 |
|
SU1184922A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Предохранительное устройство привода рабочего органа горной машины от перегрузок | 1985 |
|
SU1283378A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1967 |
|
SU202741A1 |
| Станок для обработки шеек крупногабаритных коленчатых валов | 1975 |
|
SU572369A1 |
| Гидрообъемная трансмиссия полно-пРиВОдНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1976 |
|
SU823182A1 |
| Револьверная головка | 1991 |
|
SU1816245A3 |
| Устройство для управления фрикционными элементами гидроподжимных муфт ступенчатой коробки передач транспортной машины | 1988 |
|
SU1521619A1 |
МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО, содержащее вал с захватом, привод, гидрораспределитель с подпружиненным золотником и расположенный на валу кулачок, связанный с золотником гидрораспределителя, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения возможности манипулирования деталями большой массы, оно снабжено рычагом и механизмом управления, выполненным в виде тяги и гидроцилиндра со штоком, имеющим ступенчатую часть, причем кулачок выполнен с профилированными участками, а количество ступеней штока гидроцилиндра механизма управления равно количеству профилированных участков кулачка, при этом тяга механизма управления расположена свободно на ступенчатой части штока гидроцилиндра, а рычаг связан с тягой механизма управления и расположен с возможностью взаимодействия с кулачком и с золотником гидрораспределителя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Юревич Е | |||
| И | |||
| и др | |||
| Устройство промышленных роботов | |||
| Л., «Машиностроение, 1980, с | |||
| Камневыбирательная машина | 1921 |
|
SU222A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МАНИПУЛЯТОР ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТОВ | 0 |
|
SU407708A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
