Изобретение относится к радиотехнике и может быть использовано при проектировании средств механизации и автоматизации промышленных роботов и манипуляторов для манипулирования хрупкими и легкодеформируемыми изделиями.
Целью изобретения является повышение надежности за счет автоматического регулирования подачи рабочей среды под давлением.
На фиг.1 изображен захват промышленного робота, обш.ий вид; на фиг.2 - то же, вид сбоку.
Захват промышленного робота имеет по крайней мере два пальца, сочлененные с корпусом 1. Каждый палец состоит из трех звеньев 2, 3 и 4, при этом звено 2 неподвижно связано с корпусом 1, а звенья 3 и 4 соединены шарнирами 1между собой и со звеном 2.
Поворот звеньев 3 и 4 осуществляется приводом, имеющим эластичные (упругие) камеры 5, образованные плоскими торцами 6 двух смежных звеньев 2 и 3, 3 и 4, соответственно, причем верщины камер совмещены с центрами шарниров.
Эластичные камеры 5 выполнены как одно целое с эластичной оболочкой 7.
В корпусе 1 выполнена кольцевая канавка 8, у торца которой расположена эластичная мембрана 9, а каналы 10 выполнены внутри элементов жесткого каркаса 11 каждого звена. Каналы 10 звеньев соединены с кольцевой канавкой 8 и питающей трубкой 12, проходящей внутри корпуса 1 и соединенной с источником рабочей среды под давлением (не показан). Корпус 1 закреплен на стыковочном фланце 13.
Захват промышленного робота работает следующим образом.
В исходном положении звенья 3 и 4 находятся в положении I (фиг.1). При этом эластичные камеры 5 сомкнуты, т. е. противоположные стенки камеры, образованные плоскими торцами 6 звеньев 2 и 3, 3 и 4, максимально сближены, а лучеобразные гофры сжаты.
Для осуществления захвата заготовки 14 звенья 3 и 4 необходимо перевести в положение II, т. е. повернуть зве.нья относительно шарниров. Это осуществляется путем подачи рабочей среды под давлением от источника по питающей трубке 12 и далее через кольцевую канавку 8 и каналы 10 в
эластичные камеры 5, которые под действием рабочей среды раздвигаются, поворачивая звенья 3 и 4 вокруг шарниров, осуществляя захват заготовки 14.
По мере перемещения звеньев 3 и 4 захватываемая заготовка 14 начинает пере0 мещаться к эластичной мембране 9, входит в соприкосновение с последней и при дальнейшем перемещении прогибает ее, уменьшая кольцевую дросселирующую щель, образованную эластичной мембраной 9 и торцом кольцевой канавки 8. При уменьщении дросселирующей щели снижается расход рабочей среды и наступает динамическое равновесие, при котором дросселирующая щель не пропускает рабочую среду в эластичные камеры 5 и усилие сжатия звеньев 3 и 4 не
0 увеличивается. Таким образом происходит автоматическое регулирование подачи рабочей среды в зависимости от усилия сжатия звеньев пальцев за счет действия эластичной мембраны 9, играющей роль регулирующего клапана, что предотвращает
5 возможность повреждения захваченной заготовки.
Формула изобретения
Захват промышленного робота, содержащий сочлененные с корпусом пальцы, раз0 деленные на звенья, щарнирно соединенные .между собой, и привод их перемещения, имеющий эластичные камеры, расположенные между соседними звеньями и соединенные с источником рабочей среды под давлением, отличающийся тем, что, с целью
повышения надежности за счет автоматического регулирования подачи рабочей среды под давлением, в корпусе выполнена кольцевая канавка, а привод перемещения звеньев снабжен эластичной мембраной,
Q расположенной у торца кольцевой канавки и образующей с последней дросселирующую щель, при этом в каждом звене выполнены сквозные каналы, соединяющие эластичные камеры звеньев между собой и с кольцевой канавкой.
Vui.Z
Составитель И. Бакулина
Редактор Л. ПовханТехред-И. ВересКорректор А. Зимокосов
Заказ 813/13Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое нредприятие, г. Ужгород, ул. Проектная, 4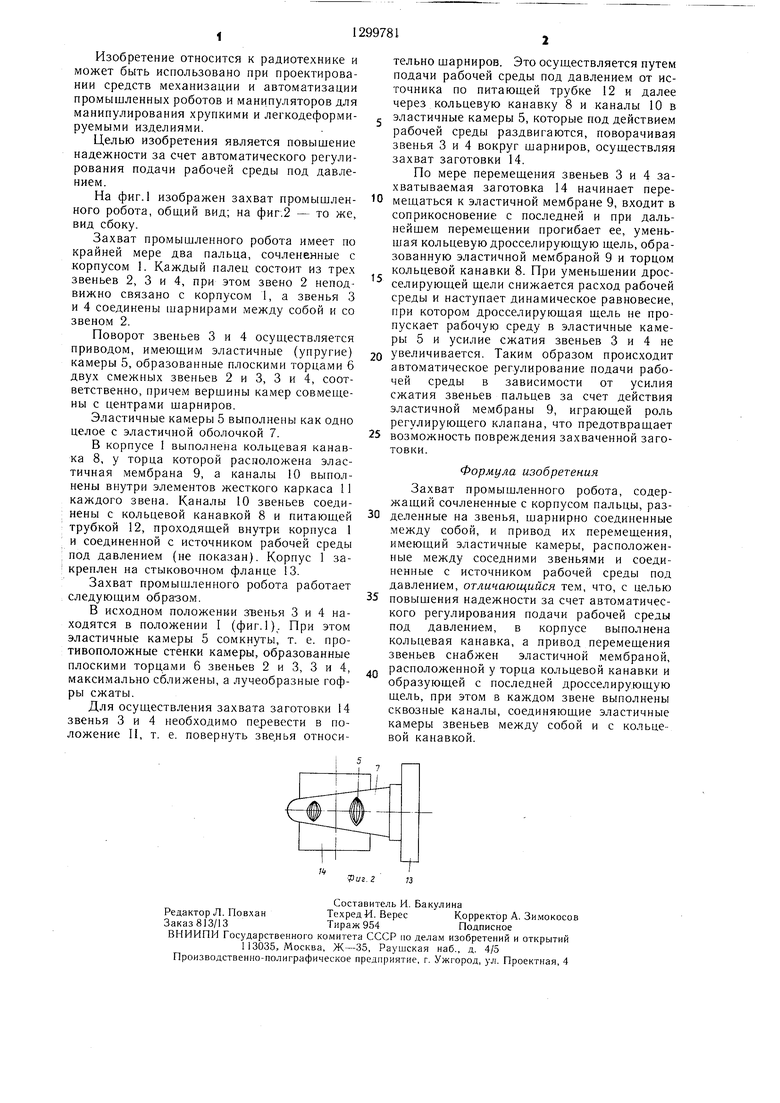
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2141396C1 |
| Схват манипулятора | 1977 |
|
SU810479A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Регулятор давления мембранный | 2017 |
|
RU2671599C1 |
| ЗАПОРНО-ПУСКОВОЕ УСТРОЙСТВО | 2002 |
|
RU2213599C1 |
| Струйный регулятор расхода | 1979 |
|
SU978106A2 |
| ВИБРОБЕЗОПАСНАЯ ПНЕВМАТИЧЕСКАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 2005 |
|
RU2309038C2 |
| Вакуумный схват | 1980 |
|
SU891429A1 |
| Устройство для гашения пульсацийдАВлЕНия | 1976 |
|
SU823661A1 |
| Захват для текстильных заготовок | 1990 |
|
SU1733360A1 |
Изобретение относится к робототехнике и может быть использовано при проектировании средств механизации и автоматизации промышленных роботов и манипуляторов, для манипулирования хрупкими и легкодеформируемыми изделиями. Целью изобретения является повышение надежности за счет автоматического регулирования подачи рабочей среды под давлением. Захват промышленного робота имеет по крайней мере два пальца, сочлененных с корпусом 1. Пальцы состоят из звеньев 2, 3 и 4, поворот звеньев 3 и 4 осушествляется приводом, имеющим эластичные камеры 5,соединенные каналами 10, выполненными в звеньях, и питающей трубкой 12 с источником рабочей среды под давлением. В корпусе 1 выполнена кольцевая канавка 8, у торца которой расположена эластичная мембрана 9, образующая с последней дросселирующую щель. По мере перемещения звеньев при подаче рабочей среды под давлением в эластичные камеры 5 заготовка прогибает эластичную мембрану 9, уменьшая кольцевуЬ дросселирующую щель, до наступления динамического равновесия. 2 ил. (Л э со со оо
| Захват робота | 1978 |
|
SU677908A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
