(54) ВАКУУМНЫЙ СХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Головка манипулятора | 1980 |
|
SU1041287A1 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Пневматический захват | 1979 |
|
SU829536A1 |
| Вакуумный схват | 1989 |
|
SU1689066A1 |
Изобретение относится к машино- и приборостроению и может быть использовано в промышленных роботах и манипуляторах для захвата и переноса деталей на рабочие позиции.
Известен вакуумный схват, содержащий корпус с присоской на его основании, в котором имеется верхняя и нижняя камеры с полостью внутри и подпружиненным штоком 1.
Недостатком известного устройства является ненадежность отделения деталей от схвата.
Цель изобретения - повышение надежности отделения детали от схвата.
Цель достигается тем, что вакуумный схват снабжен эластичной мембраной, установленной в верхней камере корпуса, причем подпружиненный шток соединен одним концом с этой мембраной, а другой его конец снабжен упором.
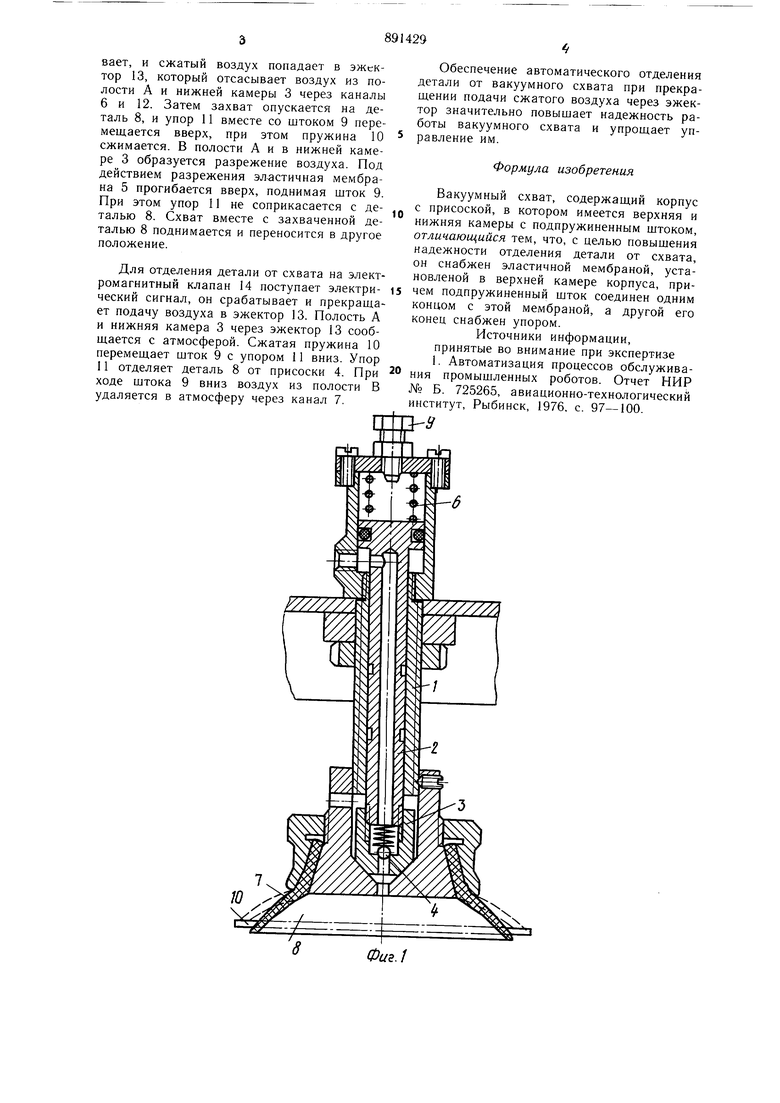
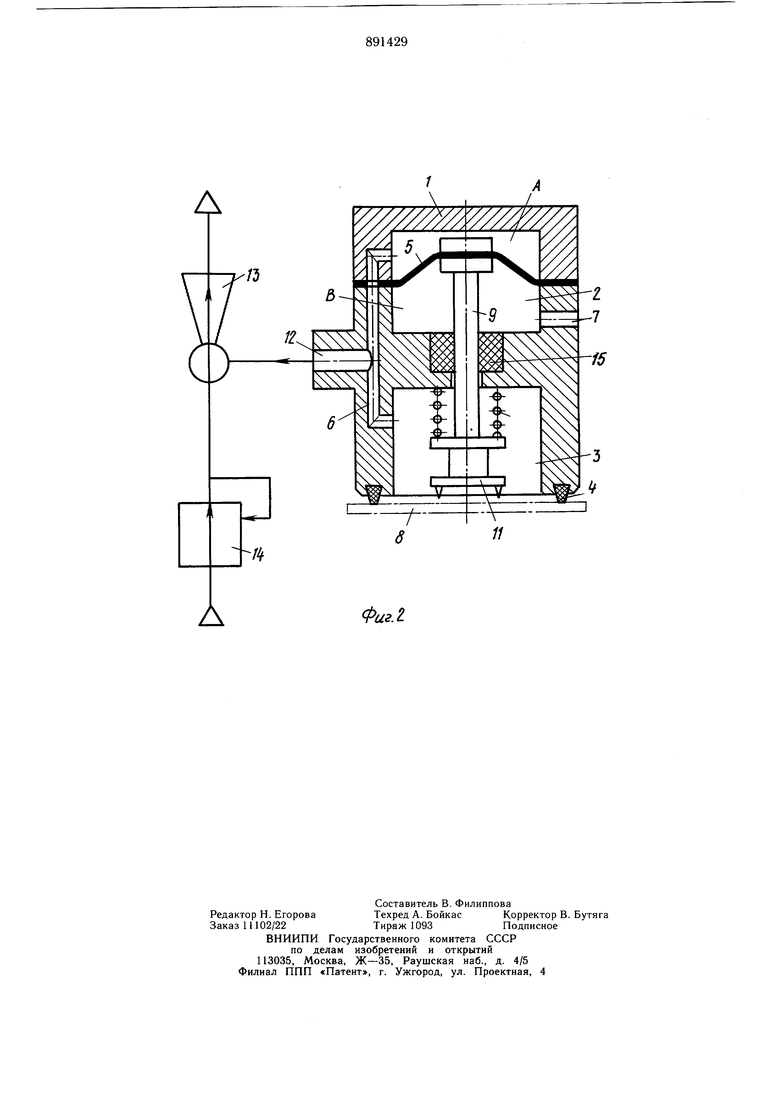
На фиг. 1 показан вакуумный схват, обш,ий вид; на фиг. 2 - камера схвата, общий вид.
Вакуумный схват состоит из корпуса 1, в котором расположены верхняя камера 2,
нижняя камера 3 и присоска 4. Верхняя камера 2 разделена эластичной мембраной 5 на две полости А и В. Полость А соединена каналом 6 с нижней камерой 3, полость В - каналом 7 с атмосферой. В корпусе установлен с возможностью перемещения в нем 5 в направлении, перпендикулярном поверхности детали 8, шток 9, служащий для отделения детали 8 от присоски 4. Шток 9 поджат пружиной 10, служащей для перемещения штока 9 при отделении детали. Шток 9 одним своим концом соединен с мембраной 5, которая служит для перемещения штока 9 вверх и сжатия пружины 10 при образовании вакуума в полости А. На нижнем конце штока 9 установлен упор 11, соприкасающийся с деталью 8 при ее отделении от схвата. Канал 12 соединен с
15 каналом 6 и эжектором 13. Электромагнитный клапан 14 служит для соединения источника сжатого воздуха с эжектором 13. Шток уплотнен фторопластовой втулкой 15.
20 Вакуумный схват работает следующим образом.
При подаче электрического сигнала на электромагнитный клапан 14 он срабатывает, и сжатый воздух попадает в эжектор 13, который отсасывает воздух из полости А и нижней камеры 3 через каналы 6 и 12. Затем захват опускается на деталь 8, и упор 11 вместе со штоком 9 перемещается вверх, при этом пружина 10 сжимается. В полости Айв нижней камере 3 образуется разрежение воздуха. Под действием разрежения эластичная мембрана 5 прогибается вверх, поднимая шток 9. При этом упор 11 не соприкасается с деталью 8. Схват вместе с захваченной деталью 8 поднимается и переносится в другое положение.
Для отделения детали от схвата на электромагнитный клапан 14 поступает электрический сигнал, он срабатывает и прекраш,ает подачу воздуха в эжектор 13. Полость А и нижняя камера 3 через эжектор 13 сообщается с атмосферой. Сжатая пружина 10 перемещает шток 9 с упором 11 вниз. Упор 11 отделяет деталь 8 от присоски 4. При ходе штока 9 вниз воздух из полости В удаляется в атмосферу через канал 7.
Обеспечение автоматического отделения детали от вакуумного схвата при прекращении подачи сжатого воздуха через эжектор значительно повышает надежность работы вакуумного схвата и упрощает управление им.
Формула изобретения
Вакуумный схват, содержащий корпус с присоской, в котором имеется верхняя и нижняя камеры с подпружиненным щтоком, отличающийся тем, что, с целью повыщения надежности отделения детали от схвата, он снабжен эластичной мембраной, установленой в верхней камере корпуса, причем подпружиненный щток соединен одним концом с этой мембраной, а другой его конец снабжен упором.
Источники информации, принятые во внимание при экспертизе 1. Автоматизация процессов обслуживания промышленных роботов. Отчет НИР № Б. 725265, авиационно-технологический институт, Рыбинск, 1976. с. 97-100.
