Изобретение относится к легкой промышленности и может быть использовано в швейном, трикотажном и других производствах для захвата и отделения от стопы деталей из текстильных материалов.
Известен захват для роботизированного рабочего места швейной промышленности, содержащий составной вилкообразный корпус и выдвижные иглы вмонтированные под углом к рабочей поверхности. Каждая игла снабжена самостоятельным приводным пневмоцилиндром, а составные части вилкообразного корпуса соединены между собой шарниром ипневмоцилиндром.
Недоста .ом данного устройства явля- ется сложность конструкции. Снабжение каждой из игл, установленных в корпусе, самостоятельным пневмоприводом и введение еще одного пневмоцилиндра для поворота одной (левой) стороны составной вилкообразной противоположной стороны (правой) является сложным техническим решением как с точки зрения выполнения, так и с точки зрения управления, так как возможны сложности при синхронизации пере- мещения каждой иглы особенно при быстродействии захвата.
Известно также захватное устройство, содержащее два валика с прямыми наклонными иглами, которые снабжены самостоя- тельными приводами и центральной опорой.
Недостатком данного устройства является его сложность и ненадежность захвата вследствие низкой точности установки игл и сложного привода, так как оно может захватить лишь сравнительно длинные заготовки. Валики с иглами также сложны, так как установлены на эксцентричных осях, ко- торые покрыты специальным слоем и имеют сложный с точки зрения изготовления узел крепления игл.
По причине сложности устройство мо- ы применяться лишь для перекладывания заготовок и не может быть использовано в качестве захвата для робота, способного подавать детали в любое рабочее место.
Цель изобретения - повышение надежности захвата путем упрощения конструк- ции.
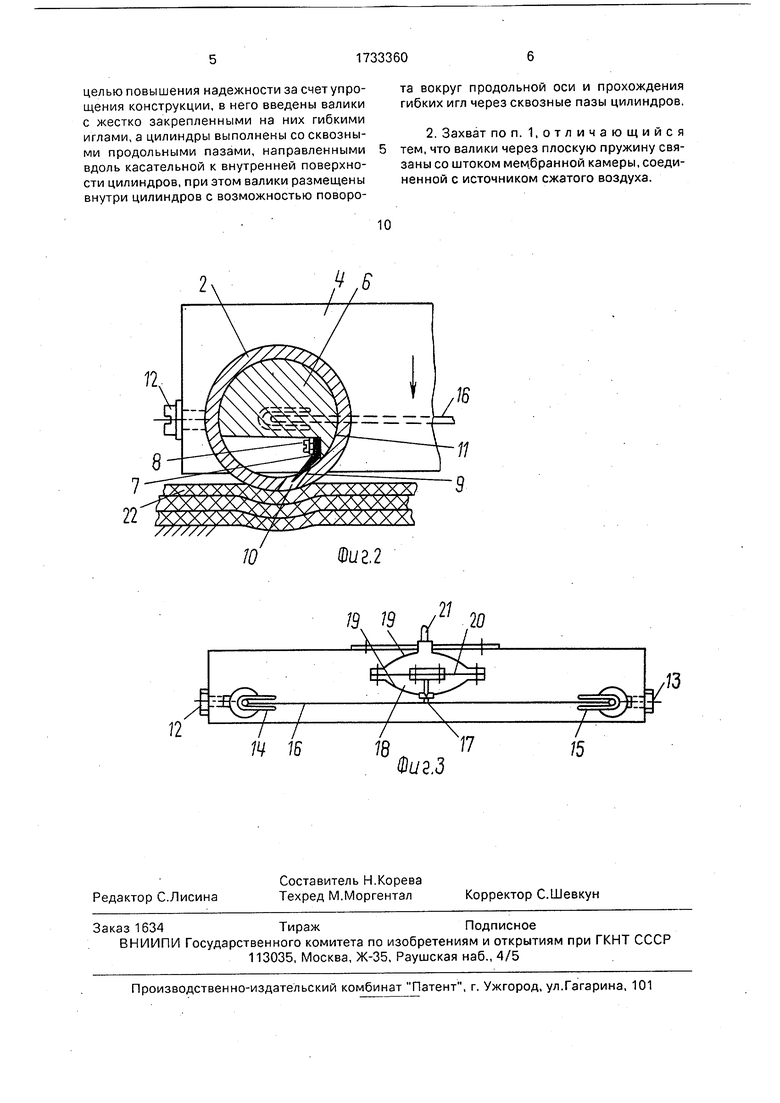
На фиг. 1 схематически показан захват, общий вид; на фиг. 2 - рабочий орган; на фиг. 3 - привод.
Захват содержит вилкообразный кор- пус 1, выполненный из двух параллельных полых опорных цилиндров 2 и 3, закрепленных на несущей плите 4 с отростком 5, ведущим к руке робота или манипулятора (не показано). Внутри опорных цилиндров 2 и 3 размещены валики б с жестко закрепленными при помощи планки 7 и винтов 8 гибкими иглами 9. Опорные цилиндры 2 и 3 имеют противоположные продольные щели 10, направленные вдоль касательной к внутренней поверхности 11, в которых размещены заостренные части гибких игл 9. Опорные цилиндры 2 и 3 посредством винтов 12 и 13 закреплены на плите 4 с возможностью осевого поворота. Валики 6 имеют вилкообразные направляющие 14 и 15, в которые вставлена плоская пружина 16, контактирующая со штоком 17 пневматического привода 18, выполненного в виде мембранной камеры 19, состоящего из мембраны 20 и канала 21 питания сжатым воздухом. Камера 19 закреплена на отростке 5. Захватываемая заготовка обозначена на чертеже цифрой 22.
Устройство работает спедующим образом.
Вилкообразный корпус 1 опускается под действием руки робота на заготовку 22, прижимая ее к столу или нижележащим заготовкам (если они лежат в многослойной пачке). Затем сжатый воздух по каналу 21 направляется в верхнюю часть камеры 19. Мембрана 20 прогибается и через шток 17 прогибает пружину 16, которая через вилкообразные направляющие 14 и 15 поворачивает валики 6 в противоположные стороны. Гибкие иглы 9, смещаясь вдоль внутренней поверхности 11 опорного цилиндра 2 и 3, через щели 10 выходят за пределы наружного контура данных цилиндров 2 и 3 и заглубляются в толщу верхней заготовки 22. При одновременном повороте обоих валиков 6 гибкие иглы 9 расходятся (выходя из цилиндров 2 и 3) и заодно придают заготовке определенное поперечное нг- яжение. Затем корпус 1 поднимается и переносит заготовку 22 Е нужном направлении. иинтами 12 и 13 выбирается ориентация щели 10 ,лтно- ситепьно пизеохности заготовки 22 (при выборе оптимального режима работы захвата, при равных толщинах тканевых заготовок). Путем cf-ятия давления в мембранной камере 19 гибкие иглы 9 возвращаются в исходное положение и высвобождают заготовку 22, После чего цикл работы захвата повторяется.
Изобретение может найти применение в легкой промышленности при создании роботизированных рабочих мест.
Формула изобретения
1. Захват для текстильных заготовок, содержащий два опорных полых цилиндра, ко- торые установлены на основании параллельно друг другу с возможностью поворота вокруг продольной оси и снабжены иглами, отличающийся тем, что, с
целью повышения надежности за счет упрощения конструкции, в него введены валики с жестко закрепленными на них гибкими иглами, а цилиндры выполнены со сквозными продольными пазами, направленными вдоль касательной к внутренней поверхности цилиндров, при этом валики размещены внутри цилиндров с возможностью поворота вокруг продольной оси и прохождения гибких игл через сквозные пазы цилиндров.
2. Захват по п. 1,отличающийся тем, что валики через плоскую пружину связаны со штоком мембранной камеры, соединенной с источником сжатого воздуха.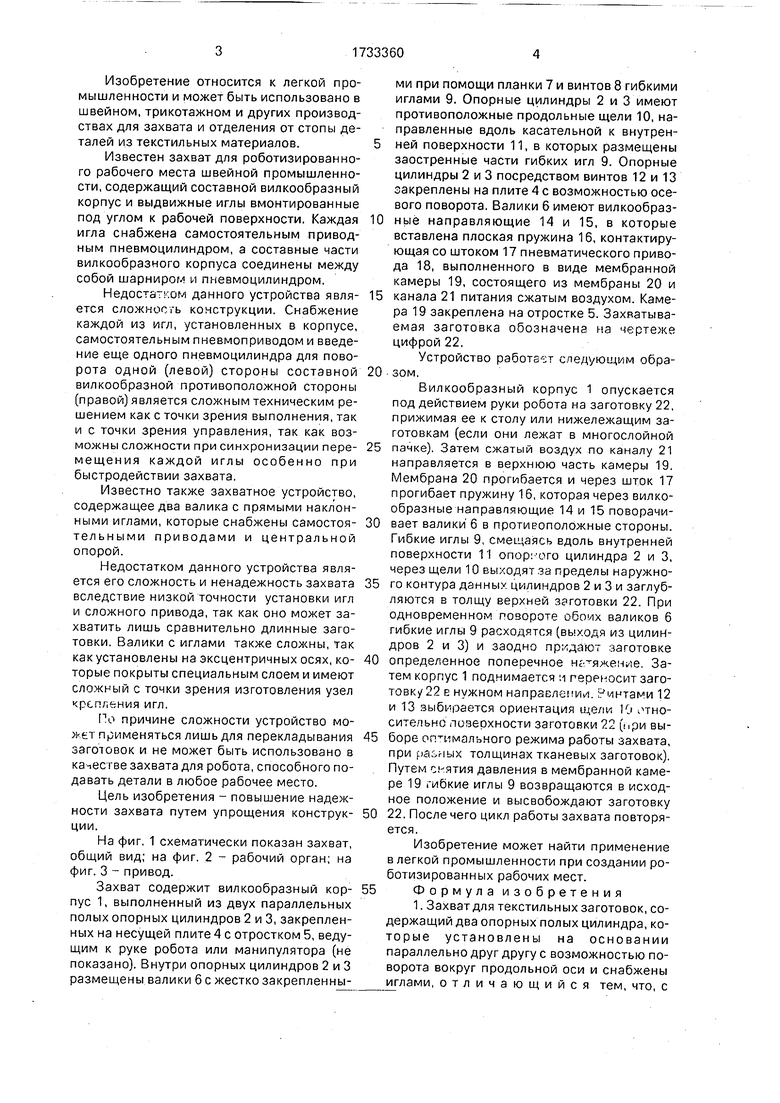
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата уложенных в стопу текстильных заготовок | 1990 |
|
SU1733361A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| СХВАТ | 1991 |
|
RU2028269C1 |
| Устройство для захвата текстильных заготовок | 1990 |
|
SU1735174A1 |
| Устройство для перемещения заготовок | 1986 |
|
SU1400732A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Поворотный стол для подачи кассет с деталями к роботу | 1989 |
|
SU1792775A1 |
| Линия горячей штамповки | 1983 |
|
SU1119826A1 |
Сущность изобретения: устройство содержит вилкообразный корпус 1, выполнен- ный из полых опорных цилиндров 2. 3, закрепленных на несущей плите 4 с отростком 5. Внутри опорных цилиндров 2 и 3 размещены два валика 6 с жестко закрепленными посредством планок и вмнтов гибкими иглами. Каждый опорный цилиндр 2, 3 выполнен с противоположной продольной щелью 10, которые направлены вдоль касательной к внутренней поверхности цилиндра, в которых размещены заостренные части гибких игл. Опорные цилиндры 2, 3 установлены на несущей плите 4 с возможностью осевого поворота. Валики 6 снабжены вилкообразными направляющими, в которые вставлена плоская пружина, расположенная с возможностью контактирования со штоком пневматического привода, выполненного в виде мембранной камеры, состоящей из мембраны и канала питания сжатым воздухом, 1 з.п. ф-лы, 3 ил. ел С /3 VI со со со О о Фиг1
7
rsxxXx
оскхх
22 )xxxxxv W
7777777 4 Ю
12
7
/ / 74 16
/
/8 Фиг.З
| Патент США № 4688837, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Патент США № 4143871, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
