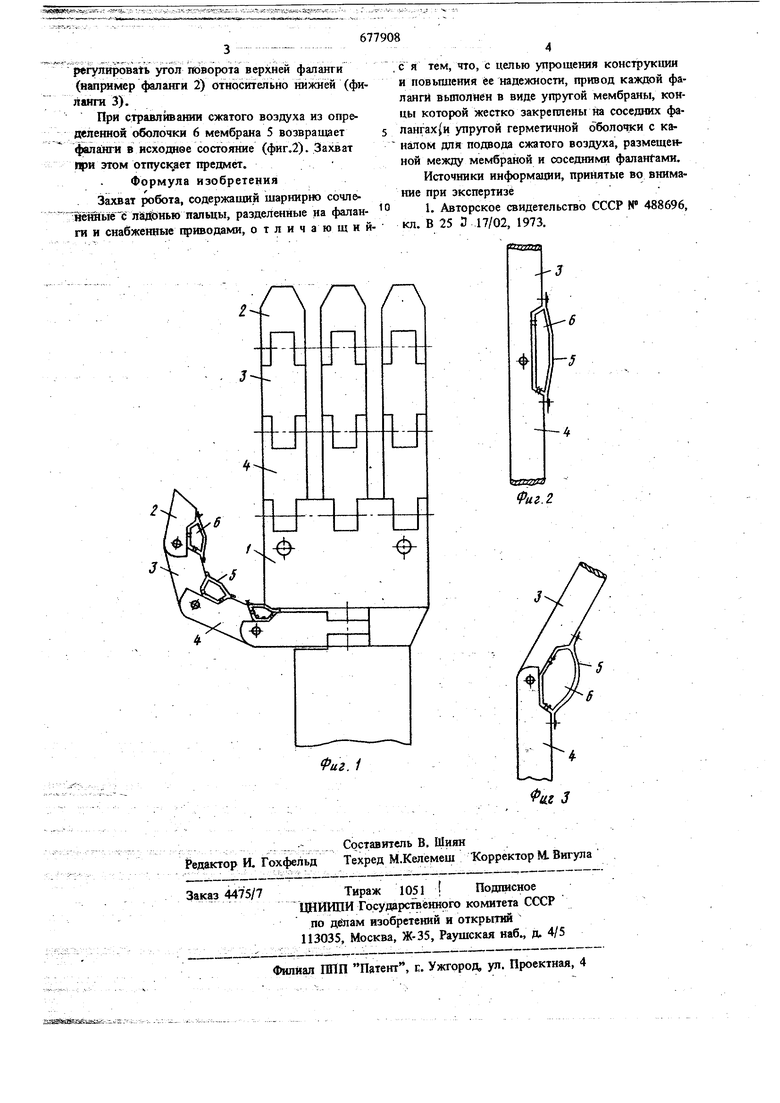
Изобретение относится к робототехнике и может быть использовано в конструкциях роботов ДЛЯ подводных работ. Ииестны захваты мащпуляторов, выполненные в виде шарнирно сочлененных с ладойью пальцев, разделенных на фаланги и снабженных приводами 1. Известные захваты имеют сложную конструк цию и сравнительно низкую надежность, что обу ловлено большим ЧИСЛОМ зубчатых зацеплений и гидродвигателей. Цель изобретения - угфостить конструкцию и 1ювысить надежность захвата, : Это достигается тем, что привод каждой фаланги выполнен в виде упругой мембраны, концы которой жестко закреплены на соседаих фалангах,и упругой герметичной оболочки с каналом дяя подвода сжатого воздуха,размешенной между мембраной и еЬседнимй фалангами. На фиг. 1 представлен предлагаемый захват робота, общга вид; на фиг. 2 w 3 - две соседние фаланги захвата соответственно в разжатом и сжатом состояниях. Предлагаемый захват имеет четыре пальца, связанных с ладонью 1, причем каждый палец Состоит из трех фаланг 2, 3 и 4. Каждая пара соседних фаланг, а также пары ладОнь 1 - фаланга 4 имеют привод, включающий в себя упругую деформирующуюся мембрану 5, жестко з2; крепленную концами на соседних фалангах, обладающую свойством возвращаться в исходное состояние после прекращения действия возмущающих СИЛ без остаточных деформаций. Под мембраной 5 расположена утфугая оболочка 6, вьшолненная в виде баллона, к которому подводится сжатый воздух по шлангам, размещенным внутри пальцев. Захват работает следующим образом. В исходном положегаш пальцы захвата находятся в расжатом состоянии, мембрана занимает положение, гфедставленное на фиг.2, а сжатый воздух в оболочку ае поступает. При подаяе сжатого воздуха оболочки 6 надуваются и игзибают мембраны 5, которые в свою очередь поюрачивают верхнюю фалангу каждой пары (фиг.З), Изменяя давление сжатого воздуха, поступающего Г оболочки, можно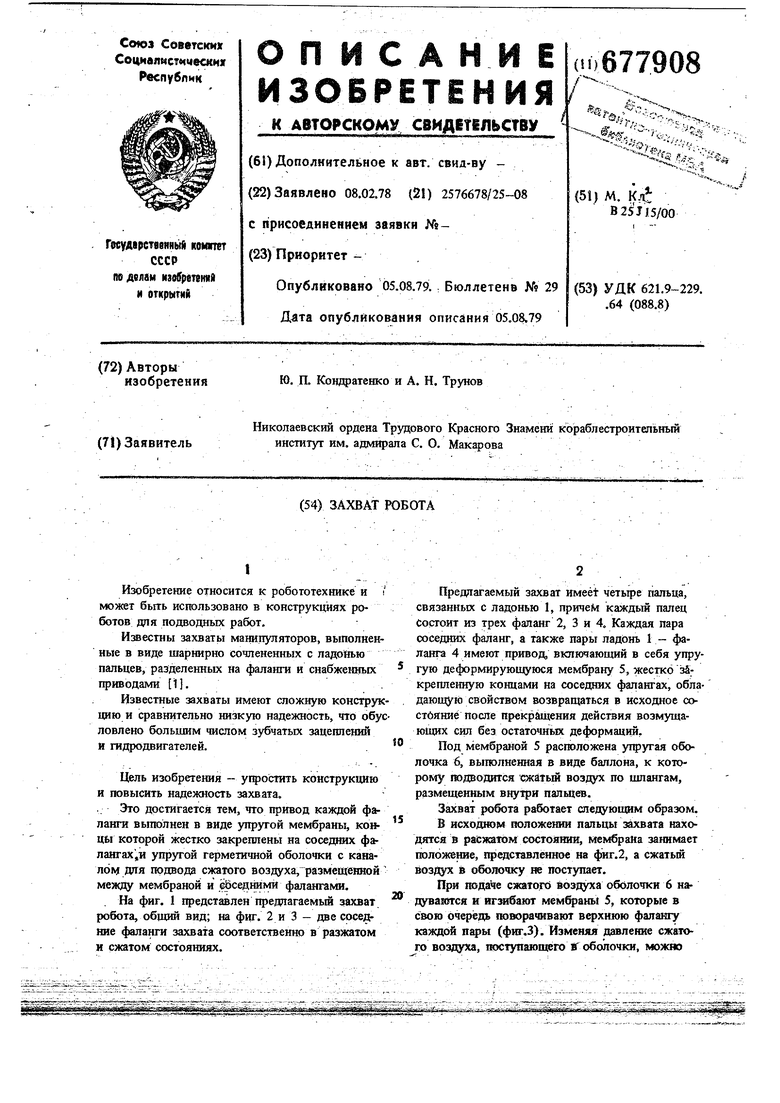
| название | год | авторы | номер документа |
|---|---|---|---|
| КИСТЬ, ПРЕДНАЗНАЧЕННАЯ ДЛЯ АНТРОПОМОРФНОГО РОБОТА, С УЛУЧШЕННЫМИ ПАЛЬЦАМИ | 2015 |
|
RU2643753C1 |
| Захват промышленного робота | 1985 |
|
SU1299781A1 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| АДАПТИВНЫЙ ЗАХВАТ | 2016 |
|
RU2624278C1 |
| Захват | 1981 |
|
SU975392A1 |
| Схват | 1979 |
|
SU837922A1 |
| ПРИВЕДЕНИЕ В ДЕЙСТВИЕ РУКИ, ПРЕДНАЗНАЧЕННОЙ ДЛЯ ОСНАЩЕНИЯ РОБОТА-ГУМАНОИДА | 2015 |
|
RU2662851C2 |
| Устройство пальцевой фотоплетизмографической системы для непрерывного неинвазивного измерения артериального давления | 2018 |
|
RU2682474C1 |
| УНИВЕРСАЛЬНЫЙ ВСЕНАПРАВЛЕННЫЙ ПАЛЕЦ ЗАХВАТНОГО УСТРОЙСТВА | 2022 |
|
RU2804563C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ШТАБЕЛЕЙ | 2023 |
|
RU2813430C1 |
-. .X:: Sfc- ;-
