1
Изобретение относится к области машиностроения, в частности к манипуляторам.
Известны манипуляторы, содержащие многозвенную механическую руку, звенья которой выполнены из четырех рычагов, соединенных между собой при помощи активных узлов вращения.
Известные манипуляторы не обеспечивают доступ в труднодоступиые места вследствие ограниченной их подвижности.
Цель изобретения - увеличение подвижности руки манипулятора. Для этого каждый рычаг звена выполнен регулируемым в виде силового цилиндра, корпус которого жестко соединен с несопряженным активным узлом вращения, а шток - с подвижным корпусом сопряженного узла вращения, снабженнымдвусторонней управляемой электромагнитной муфтой, соединенной с валом этого узла вращения и кинематически связанной с подвижным корпусом и механизмом изменения длины цилиндра.
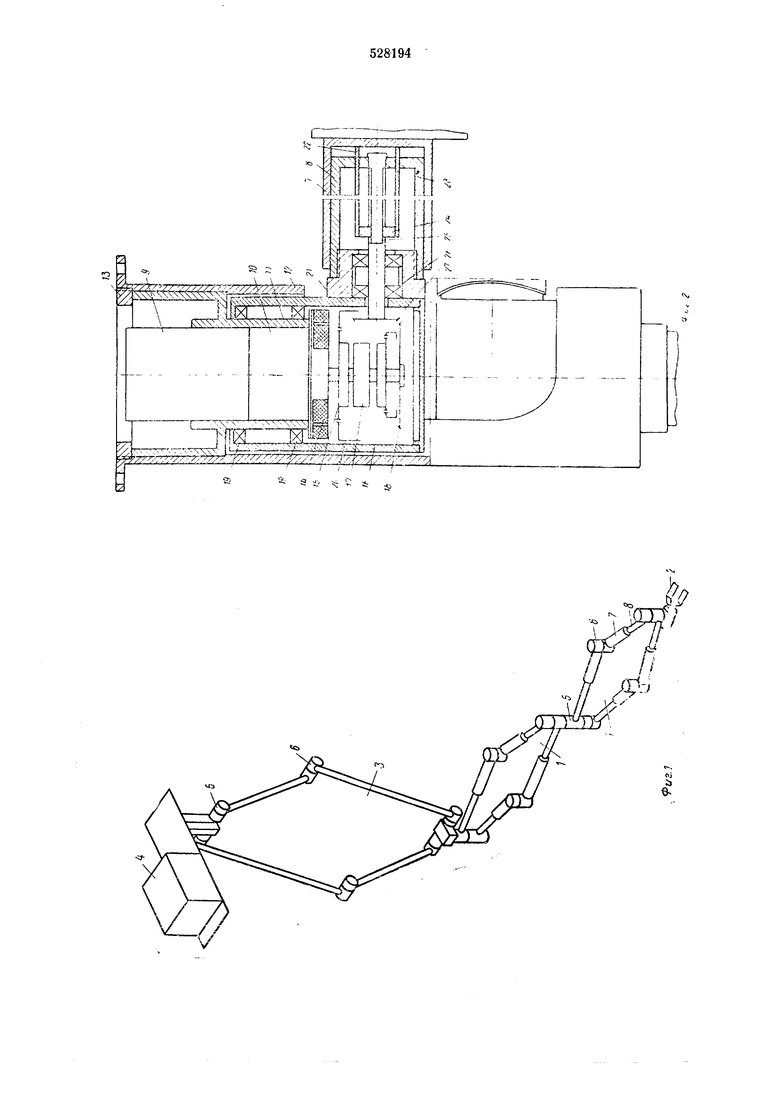
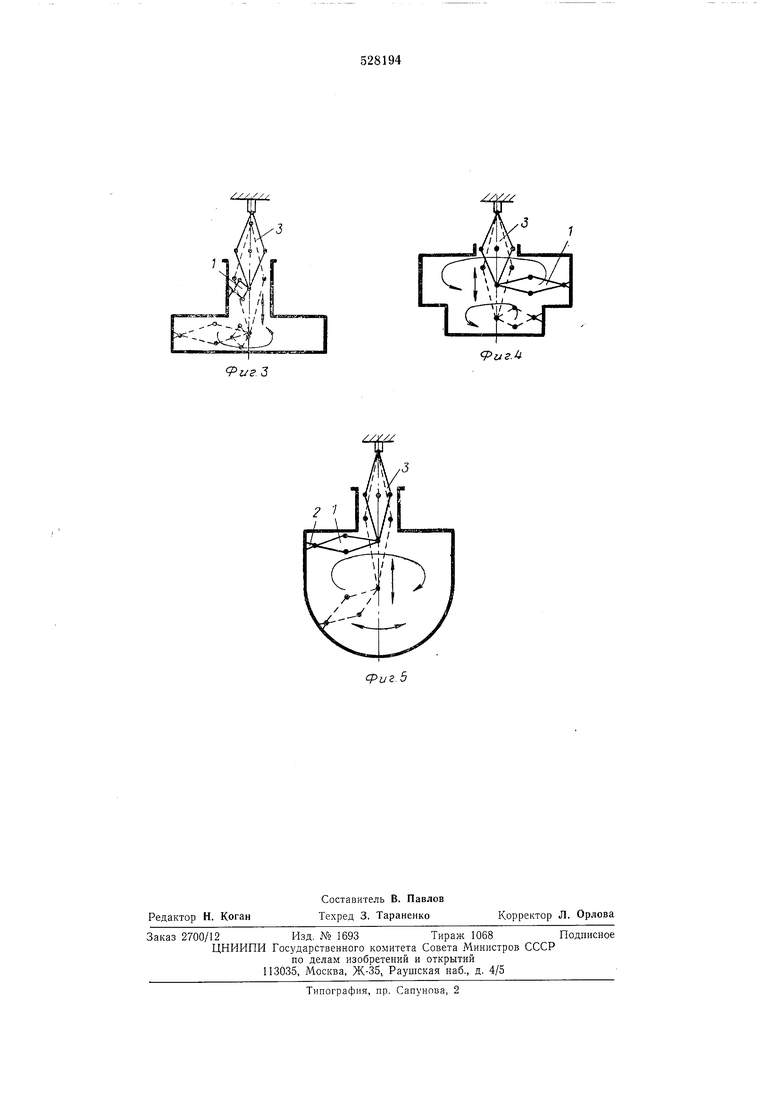
На фиг. 1 представлена принципиальная схема манипулятора; на фиг. 2 - схема сопряженного узла вращения с двусторонней электромагнитной муфтой, приводом и цилиндрами; на фиг. 3, 4 и 5 - схемы положений манипулятора в труднодоступных местах.
Манипулятор состоит из набора ромбообразных звеньев 1, служащих для горизонтального перемещения захвата 2, и звена 3, предназначенного для вертикального перемещения. Для управления через звенья захватом 2 служит блок управления 4. Рычаги ромбообразных звеньев связывают сопряженные узлы 5 вращения и несопряженные узлы 6 вращения и выполнены в виде двух силовых цилиндров- наружного 7 и внутреннего 8. Наружный цилиндр 7 жестко связан с несопряженным узлом вращения, а внутренний цилиндр 8 соединен с подвижным корпусом сопряженного узла вращения.
Сопряженный узел 5 вращения состоит из двух малогабаритных электродвигателей 9 и
планетарных редукторов 10, неподвижно закрепленных в стаканах 11, установленных в держателе 12 и зафиксированного специальной гайкой 13. На выходном валу планетарного редуктора установлена подвижная часть
датчика 14 угла поворота, цилиндрическая шестерня 15 для поворота подвижного корпуса 16, двусторонняя электромагнитная муфта 17 для переключения работы электродвигателя и коническая шестерня 18, приводящая в
движение механизм изменения длины цилиндра.
На стакан при помощи радиально-упорных подшипников 19 установлен подвижный корпус 16, внутри которого укреплена цилиндрическая шестерня 20, а снаружи закреплена
втулка 21. На наружной поверхности втулка имеет резьбу для установки внутреннего цилиндра 8, по которому перемещается наружный цилиндр 7. В наружном цилиндре при иомощи двух стоек 22 и 23 закреплена ходовая гайка 24, передвигающаяся по ходовому винту 25, установленному на двух радиальных подщипниках качения 26. На конце ходового винта установлена коническая щестерня 27.
Манипулятор работает следующим образом.
Для осуществления движения телескопических рычагов электрический сигнал, попадая на активные узлы ромбообразных звеньев 1 и 3, приводит к переключению электромагнитной муфты 17 на цилиндрическую щестерню 15, находящейся в зацеплении с шестерней 20, которая поворачивает подвижной корпус 16, уменьшая таким образом углы ромбообразного звена у сопряженных узлов 5 и увеличивая их у несопряженных узлов 6, осуществляя тем самым горизонтальное передвижение. Для дополнительного удлинения производится срабатывание электромагнитной муфты 17, которая переключается на зацепление с конической шестерней 18, находящейся в постоянном зацеплении с шестерней 27, вращающей ходовой винт 25. По ходовому винту перемещается ходовая гайка 24, которая при помощи стоек 22
и 23 производит выдвижение наружного цилиндра 7. При срабатывании четырех электромагнитных муфт 17 производится зацепление с коническими шестернями 18 и осуществляется одновременное выдвижение от двух до восьми наружных цилиндров 7 на полную отрегулированную длину рычага. Комбинируя выдвижение различных телескопических рычагов ромбообразных звеньев, можно получнть различные конфигурации ромбообразных звеньев, обеспечивающие доступ в труднодоступные места.
Формула изобретения
Манипулятор по авт. св. № 510362, отличающийся тем, что, с целью увеличения подвижности руки манипулятора, каждый рычаг звена выполнен регулируемым в виде силового цилиндра, корпус которого жестко соединен с несопряженным активным узлом вращения, а шток - с подвижным корпусом сопряженного узла вращения, снабженным двусторонней управляемой электромагнитной
муфтой, соединенной с валом этого узла вращения и кинематически связанной с подвижным корпусом и механизмом изменения длины цилиндра.
L- UJ.
I : т: Ч .., , I
v; Ш
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор с программным управлением | 1972 |
|
SU510362A1 |
| Манипулятор | 1980 |
|
SU921848A1 |
| Устройство для шаговой подачи изделий | 1979 |
|
SU1011303A1 |
| Манипулятор | 1982 |
|
SU1013259A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Металлорежущий станок с ЧПУ | 1983 |
|
SU1138261A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| УСТРОЙСТВО ДЛЯ СВАРКИ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1970 |
|
SU259297A1 |
| Рука манипулятора | 1980 |
|
SU908587A1 |