Изобретение относится к машиностроению, и предназначено для автоматизации технологических операций, требующих значительного числа точек позиционирования, в частности к конструкции позиционных ма- нипуляторов, и может быть использовано для извлечения деталей из пресс-форм тер- мопластавтомата и позиционной укладки их в тару или кассету.
Цель изобретения-- повышение точно- сти позиционирования за счет обеспечения жесткой фиксации положения руки.
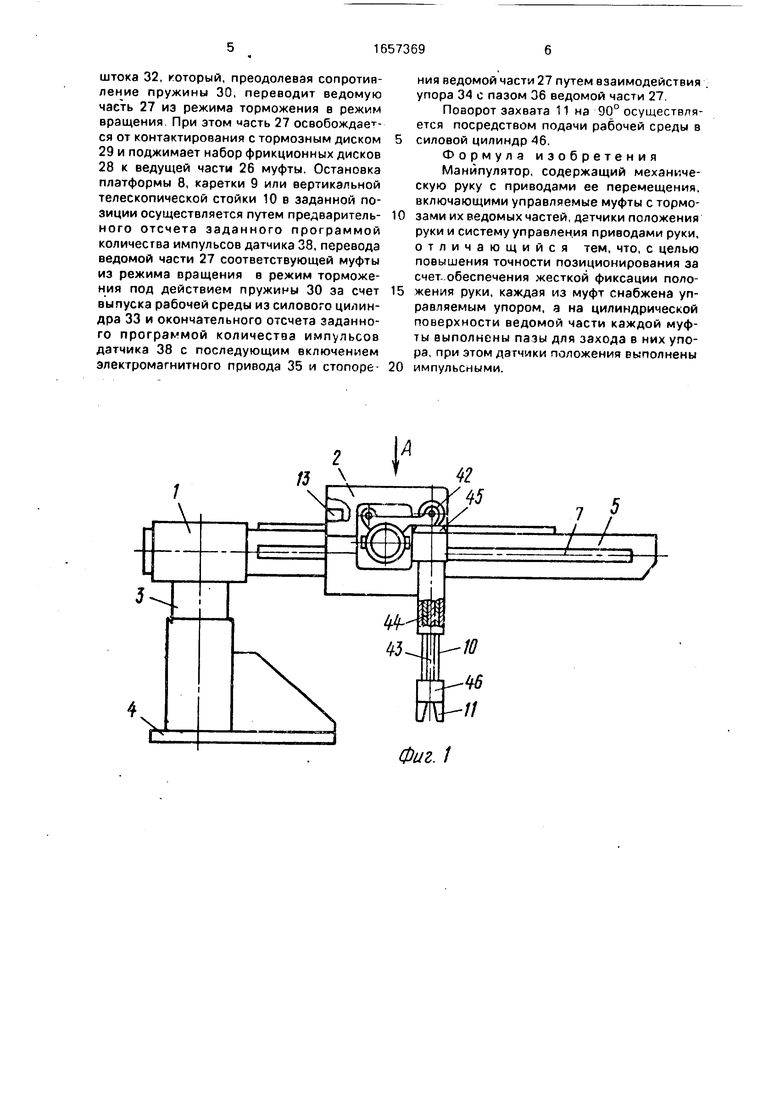
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
На корпусе 1 манипулятора расположена механическая рука 2. Корпус 1 выполнен в виде кронштейна и снабжен вертикальной стойкой 3, площадкой 4 для крепления манипулятора и горизонтальной направляю- щей 5 трубчатого сечения для размещения на ней зубчатой рейки 6 и двух профильных планок 7. Механическая рука 2 снабжена платформой 8, кареткой 9, вертикальной телескопической стойкой 10 и поворотным за- хватом 11. Платформа 8 установлена с помощью четырех роликов 12 на профильных планках 7 с возможностью горизонтального перемещения вдоль оси направляющей 5 и содержит электромеханический привод 13, а также горизонтальную направляющую 14 трубчатого сечения для размещения на ней двух профильных планок 15. Оси горизонтальных направляющих 5 и 14 взаимно перпендикулярны. Электромеханический привод 13 включает в себя электродвигатель 16 асинхронного типа, ременные передачи 17, три ведущих вала 18, три муфты 19, три ведомых вала 20, редуктор 21, на выходном валу которого закреплена шестерня 22, взаимодействующая с зубчатой рейкой 6, винт 23 и вал 24 прямоугольного сечения. Каждая из муфт 19 содержит неподвижный корпус 25, ведущую часть 26 и ведомую часть 27, набор фрикционных дисков 28, расположенных на ведомой части 27, тормозной диск 29, закрепленный на неподвижном корпусе 25, пружину 30, контактирующую своими торцами с ведомой частью 27 и упорной втулкой 31, распо- ложенной на конце ведомого вала 20. Муфтой управляют посредством штока 32 силового цилиндра 33, воздействующего на ведомую часть 27 муфты в осевом направлении. На корпусе 25 каждой муфты установлен управляемый упор 34 с электромагнитным приводом 35, взаимодействующий при позиционировании с пазами 36, выполненными на цилиндрической поверхности части 27 муфты. На валу 20 закреплен диск 37
с прорезями, взаимодействующий с датчиком 38, выдающим импульсные сигналы. Часть 26 муфты расположена на торце ведущего вала 18, на противоположном конце которого закреплен шкив 39 ременной передачи 17. Ведомая часть 27 муфты расположена на участке ведомого вала 20 прямоугольного сечения с возможностью осевого перемещения и взаимодействия торцами с частью 26 муфты через набор фрикционных дисков 28 или тормозным диском 29. Каретка 9 установлена с помощью четырех роликов 40 на профильных планках 15 с возможностью горизонтального перемещения вдоль оси направляющей 14 и содержит гайку 41, взаимодействующую с винтом 23, вертикально расположенную шестерню 42 с прямоугольным отверстием в ступице для размещения ее на валу 24 прямоугольного сечения с возможностью осевого перемещения с кареткой 9. Вертикальная телескопическая стойка 10, звенья которой зафиксированы от поворота с помощью шпоночного соединения 43, закреплена на каретке 9 и снабжена винтовым механизмом 44, расположенным соосно внутри вертикальной телескопической стойки 10. Горизонтально расположенная коническая шестерня 45 взаимодействует с конической шестерней 42. Поворотный захват 11 расположен на нижнем конце телескопической стойки 10 и связан с силовым цилиндром 46.
Манипулятор работает следующим образом.
Манипулятор устанавливают на неподвижную плиту, например, для установки пресс-форм термйпластавтомата и прикрепляют его к ней посредством площадки 4 с возможностью поворота вертикальной стойки 3 на 180° для удобства смены технологической оснастки. При включении электродвигателя 16 вращение передается ременной передаче 17 и посредством вала 18 ведущей части 26 соответствующей муфты. Под действием пружины 30 и при отсутствии давления рабочей среды в силовом цилиндре ведомая часть 27 находится в заторможенном состоянии за счет прижатия ее к диску 29. При этом платформа 8, каретка 9 и вертикальная телескопическая стойка 10 находятся в состоянии покоя. В соответствии с командой программного устройства (не показано) независимо друг от друга в любой последовательности или одновременно может перемещаться платформа 8, каретка 9 и вертикальная телескопическая стойка 10 до заданной позиции путем создания в силовом цилиндре 33 соответствующего привода давления рабочей среды и перемещения
штока 32, который, преодолевая сопротивление пружины 30, переводит ведомую часть 27 из режима торможения в режим вращения. При этом часть 27 освобождается от контактирования с тормозным диском 29 и поджимает набор фрикционных дисков 28 к ведущей части 26 муфты. Остановка платформы 8, каретки 9 или вертикальной телескопической стойки 10 в заданной позиции осуществляется путем предваритель- ного отсчета заданного программой количества импульсов датчика 38. перевода ведомой части 27 соответствующей муфты из режима вращения в режим торможения под действием пружины 30 за счет выпуска рабочей среды из силового цилиндра 33 и окончательного отсчета заданного программой количества импульсов датчика 38 с последующим включением электромагнитного привода 35 и стопоре-
ния ведомой части 27 путем взаимодействия упора 34 с пазом 36 ведомой части 27.
Поворот захвата 11 на 90° осуществляется посредством подачи рабочей среды в силовой цилиндр 46.
Формула изобретения Манипулятор, содержащий механическую руку с приводами ее перемещения, включающими управляемые муфты с тормозами их ведомых частей, датчики положения руки и систему управления приводами руки, отличающийся тем, что, с целью повышения точности позиционирования за счет-.обеспечения жесткой фиксации положения руки, каждая из муфт снабжена управляемым упором, а на цилиндрической поверхности ведомой части каждой муфты выполнены пазы для захода в них упора, при этом датчики положения выполнены импульсными.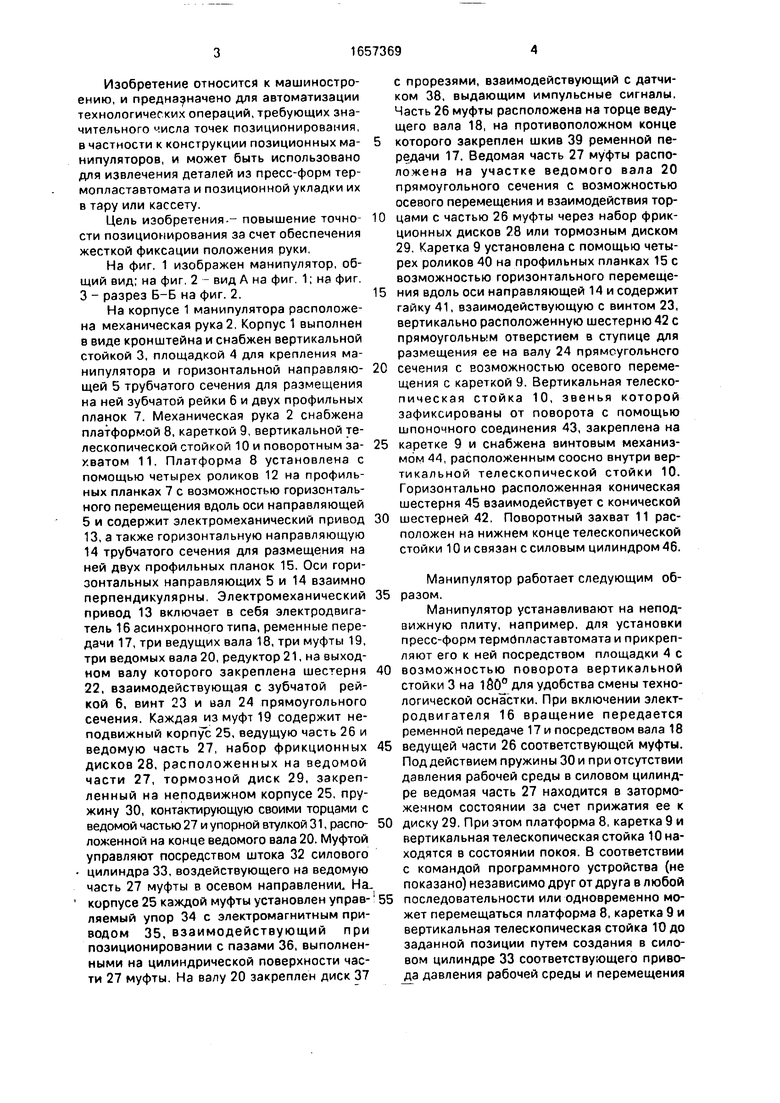
| название | год | авторы | номер документа |
|---|---|---|---|
| ТАНДЕМ А.Г. ДВОРЯНИДОВА | 2003 |
|
RU2247051C1 |
| ВЕТРОДВИГАТЕЛЬ | 2006 |
|
RU2318132C1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| Устройство для обработки ленточного материала | 1988 |
|
SU1516199A1 |
| Установка для сборки резинотехнических изделий | 1980 |
|
SU971666A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1131648A1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
| ТРЕНАЖЕР | 1991 |
|
RU2015705C1 |
Изобретение относится к машиностроению и служит для автоматизации технологических операций, требующих значител ьного числа точек позиционирования, в частности к конструкции позиционных манипуляторов, и может быть использовано для извлечения деталей из пресс-форм термопластавтомата и позиционной укладки их в тару или кассету. Целью изобретения является повышение точности позиционирования за счет обеспечения жесткой фиксации положения руки. Рука манипулятора перемещается с помощью приводов, включающих управляемые муфты, состоящие из ведомой 27 и ведущей 26 частей, при этом при выключении муфты ведомая 27 часть поджимается к тормозному диску 29. Положение манипулятора определяется количеством импульсов, поступающих с датчика 38, взаимодействующего с диском 37, имеющим прорези и связанным с ведомым валом 70. Когда число импульсов, снимаемых с датчика, будет равно заданному по программе, включается электромагнит 35 привода упора 34 и упор входит в один из пазов 36, выполненных на цилиндрической поверхности ведомой части 27 муфты. 3 ил. Б-6 (Л С J .35 о ел XI GJ О Ю
Фиг,. 2
| Приводное устройство для вращения захвата руки промышленного робота относительно взаимно-перпендикулярных осей и движения губок захвата | 1980 |
|
SU919865A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
