4
сд
Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам.
Цель изобретения - повышение точности позиционирования, надежности и рас- ширение функциональных возможностей за счет применения прецессионного редуктора. На чертеже показан захват промышленного робота.
Захват промышленного робота содержит корпуса 1, в котором размешен электродвигатель 2 и редуктор 3. Редуктор содержит сателлитный блок колес 4 с зубчатыми венцами 5 и 6, зацепляюшимися соответственно с неподвижным 7 и врашаюшимся 8 зубчатыми коническими колесами. При этом пос- леднее жестко связано с ведомым валом 9. Сателлитный блок колес установлен на сферическом подшипнике 10, который установлен на эксцентричной втулке 11, жестко связанной с валом электродвигателя 2. Be- домый вал 9 связан посредством торцовой зубчатой муфты 12 с основанием 13, на котором установлены губки схватов 14. Кроме того, на соответствуюших поверхностях корпуса 1 и основания 13 размешены датчики 15 Во внутренней полости сателлитного блока колес выполнены винтовые канавки 16, в которых размешены тела 17 качения, связанные одновременно посредством гнезд 18 с гайкой 19, находяшейся во внеполюсном зацеплении с винтом 20. Фланец 21 гайки 19, размешен на телах 22 качения в профиль- ном пазу ползуна 23, который подпружинен в осевом направлении посредством упругих элементов 24. Винт 20 жестко связан с звеньями схватов 14.
Захват промышленного робота работает следуюшим образом.
Вращательное движение вала электродвигателя 2 посредством эксцентричной втулки 1 1 и подшипника 10 преобразуется в прецессионное движение сателлитного блока колес. В результате закрепления венцов 5 и 6 сателлитного блока 4 с зубьями колес 7 и 8 последнее вращается с редукцией
i- 5
.fZ - ZfZ ,
где Zs-,Ze -соответственно числа зубьев венцов сателлитного блока колес;
i-iT- - числа зубьев колес 7 и 8.
При включенных датчиках 15 зубья зубчатой муфты 12 находятся в зацеплении и редуцированное движение (вращательное) колеса 8 передается основанию 13.
Сателлитный блок колес, совершая прецессионное движение, сообщает гайке 19 посредством тел 17 качения планетарное движение с эксцентриситетом e atgy, - угол наклона оси сателлитного блока колес а - расстояние от плоскости расположения тел 17 качения до центра прецессии 25. В
результате внеполюсного зацепления гайки 19 с винтом 20 последний перемещается со скоростью УПЛ . Изменение расстояния а вызывает изменение текущих радиусов зацеп- лнния винта 20 и гайки 19, а следовательно изменение составляющей скорости Упя.
Одновременно гайка 19 получает вращательное движение вокруг оси винта 20, обратное по направлению планетарному двигтг
жению, с редукцией i -
t-t X-S
зультате зацепления гайки 19 с винтом 20 от этого вращательного движения последний перемешается в обратном направлении со скоростью . Суммарная скорость пе- ремешения винта получается алгебраическим суммированием двух движений. Перемещение гайки 19 в осевом направлении позволяет регулировать эксцентрисистет е, а следовательно, и скорость осевого перемещения винта от планетарного движения гайки Упл . Винт 20 жестко соединен со звеньями схвата 14. При достижении необходимого усилия зажима в схвате 14 гайка 19, преодолевая усилие пружинения упругих элементов 24 и наклон винтовой канавки 16, перемещается в осевом направлении до тех пор, пока составляющие суммарной скорости винта 20 Упл и Уокр не будут равны по величине. При этом винт 20 останавливается при работающем электродвигателе 2.
Следовательно, подбором соотношения зубьев колес прецессионной передачи и параметров несоосной винтовой передачи можно обеспечить регулирование скорости осевого пере.мешения винта в нужном диапазоне вплоть до полной остановки.
Перемешение гайки в осевом направлении при достижении необходимого усилия зажима с последующей остановка винта позволяет повысить надежность захвата про- мыщленного робота в целом, упростить схему управления захватом.
Получение от одного привода двух независимых движений позволяет расщирить функциональные возможности захвата промышленного робота.
Формула изобретения
Захват промышленного робота, содержащий корпус, установленный в нем приводной двигатель, механизм редукции и схваты, отличающийся тем, что, с целью повышения точности позиционирования, надежности и расширения функциональных возможностей, механизм редукции выполнен в виде прецессионного редуктора, одно из конических колес которого связано с корпусом захвата посредством зубчатой муфты с возможностью вывода из зацепления одной из полумуфт, а во внутренней полости сателлитного блока колес размещена гайка, имеющая возмож ность взаимодействия с сателлитным блоком колес посредством тел качения, расположенных в винтовых канавках внутренней поверхности сателлитного блока колес, а виг:. связан с механизмом ехвата, i.pH .1 алг.. имеет возможность осевого перемещения и подпружинена относительно зубчатой муфты.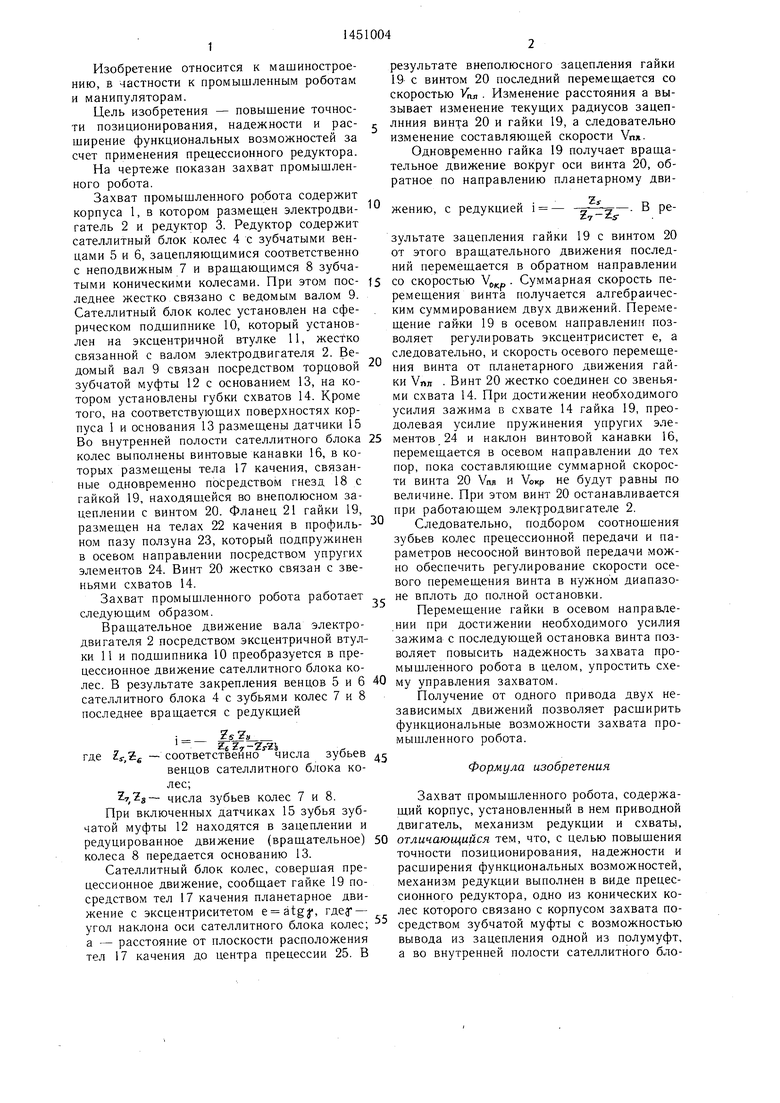
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1987 |
|
SU1511115A1 |
| Захват промышленного робота | 1988 |
|
SU1583285A1 |
| Захват манипулятора | 1988 |
|
SU1593950A1 |
| Сборочная головка | 1989 |
|
SU1713768A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| Промышленный робот | 1981 |
|
SU1149860A3 |
| Манипулятор | 1987 |
|
SU1465301A1 |
| ПРЕЦЕССИОННАЯ ПЕРЕДАЧА | 1990 |
|
RU2099614C1 |
| Планетарно-винтовой механизм | 1987 |
|
SU1499019A1 |
| Манипулятор | 1987 |
|
SU1511120A1 |
Изобретение относится к промышленным роботам и манипуляторам. Цель изобретения - повышение точности позиционирования, надежности и расширение функциональных возможностей за счет применения прецессионного редуктора. Захват промышленного робота содержит корпус 1, размешенные в нем электродвигатель 2, прецессионный редуктор 3, в ступице сателлит- ного блока колес 4 которого размещена насосная винтовая передача, гайка 19 которой связана с сателлитным блоком колес 4. Гайка 19 находится во внеполюсном зацеплении с винтом 20 и выполнена с возможностью осевого перемещения. Колесо 8 жестко связано с валом 9, который через муфту 12 связан с основанием 13, на котором установлены губки схватов 14. При включенном состоянии датчиков 15 редуцированное вращательное движение колеса 8 передается схвату 14. Осевое перемещение винта 20, связанного с схватом 14, складывается из двух противоположных по направлению планетарного и вращательного движений гайки вокруг оси винта, одно из которых можно плавно регулировать. 1 ил. со (Л
iZXiItt
-/r irrr-i
. 71 Ю 5/r6r7W2U2l22 20 18
г4
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
