20
Iвниз. При этом MFC через кольцевые зазоры между внутренней стен кон цилиндра корпуса 1 и поршней 11 перетекает 1:з одной полости цилиндра в другую и гидросопротивление зазоров определяет величину демпфирующего усилия и скорости поршней 11 и 6. Управление виброгасителем сводится- к изменению, гидросопротивленйя путем создания в зазора х радиального магнитного поля. При сжатии пружины 2 расстояние между поршнем 11 и магнитом 5 уменьшается,
в результате чего индукция магнитного поля в кольцевом зазоре мелзду поршнем
IIи цилинд{)ом корпусг. 1 увеличивается, вязкость МРС возрастает, что приводит к дополнительному рассеиванию энергии колебаний. Анс1логичньм образом процесс повторяется при движении поршня 11 вверх благодаря наличию магнита 4. Таким образом, в процессе колебаний подвешённог 5 к полиспасту груза происходит рассеяние энергии
Изобретение относится к грузоподъемным механизмам, а именно к подвескам обоймы неподвижных блоков полиспаста.
Цель изобретения - демпфирование 5 колебаний при различных динамических нагрузках.
На чертеже показана подвеска обоймы неподвижных блоков полиспаста грузоподъемных мапшн, общий вид. О
Подвеска обоймы неподвижных блоков полиспаста содержит корпус 1 виброгасителя, внутри которого последовательно расположены верхняя 2 и нижняя 3 пружины, причем жесткость пружины 3 больше жесткости пружины 2„ В верхней . части цилиндра 1 установлен постоянный магнит 4. Между пружинами 2 и 3 ргстановлены постоянный -магнит 5 с отверстием и нижний поршень 6, которые могут перемещаться вдоль штока 7. По периметру поршня 6 в пазах проложена обмотка 8 возбутвдения, соединенная с датчиком 9 перемещений через форми- (Как при движении поршня 11 вниз, так рователь 10 сигнала. Шток 7 соединен и при движении вверх, вследствие чего одним концом с верхним поршнем 11, другим с обоймой 12 неподвижных блоков полиспаста, огибаемых тяговым канатом 13 посредством цилиндра 14. Корпус 1, шток 7, поршни 6, 11 выполнены из магнитного материала. Корпус виб- рогасителя 1 посредством скобы 15 подвешивается к раме грузовой тележки 16. Полость корпуса 1 залита магнито- реологической суспензией (МРС), кото- 5 между поршнем 6 и внутренней цилинд- рая под действием магнитного поля, рической поверхностью корпуса 1 соз- образованного постоянными магнитами 4 и 5 и обмоткой 8 возбужд,ения, меняет свою вязкость. Выход датчика 9 перемещений соединен с входом усилителя-ограничителя 17, выход которого соединен с входом дифференцирующей цепи 18, состоящей из последовательно включенного конденсатора и параллельно включенного резистора, выход которой соединен с входом буферного усилителя 19, вькод последнего через усилитель 20 мощности соединен
с обмоткой 8 возбуждения. I
Устройство работает следующим образом.
В исходном положении (без груза) поршни 11 и 6 под действием пружин 2 и 3 находятся в верхнем положении. Питание на обмотку 8 возбуждения не
30
40
суммарное рассеяние энергии за период колебаний возрастает.
За счет разной жесткости пружин 3 и 2 перемещение верхнего поршня 11 больше, чем нижнего. При обратном ходе деталей 2,3,5 - 8,11 - 13 подвески датчик 9 перемещений через формирователь 10 сигнала подает питание в обмотку 8 возбуждения. При этом в зазоре
дается магнитное поле такой напряженности, при котором ги,1росопротивление нижнего кругового зазора не дает возможность поршню 6 перемещаться относительно цилиндра корпуса 1. В этом случае жесткость виброгасителя определяется только жесткостью верхней
пружины 2. 45 I
Датчик 9 перемещений, регулирующий
перемещение штока 7 относительно корпуса 1, вырабатывает электрический сигнал, величина которого пропорцио50 нальна относительному перемещению штока и корпуса (сжатию пружин 2 и 3), причем в положении поршня, соответствующем отсутствию нагрузки, величина сигнала равна нулю (стандартный
55 датчик с реверсивным выходным сигналом) . В формирователе 10 сигнала испоступает. При подъеме груза верхний поршень 11, сжимая пружину 2, перемещается относительно цилиндра корпуса
0
Iвниз. При этом MFC через кольцевые зазоры между внутренней стен кон цилиндра корпуса 1 и поршней 11 перетекает 1:з одной полости цилиндра в другую и гидросопротивление зазоров определяет величину демпфирующего усилия и скорости поршней 11 и 6. Управление виброгасителем сводится- к изменению, гидросопротивленйя путем создания в зазора х радиального магнитного поля. При сжатии пружины 2 расстояние между поршнем 11 и магнитом 5 уменьшается,
в результате чего индукция магнитного поля в кольцевом зазоре мелзду поршнем
IIи цилинд{)ом корпусг. 1 увеличивается, вязкость МРС возрастает, что приводит к дополнительному рассеиванию энергии колебаний. Анс1логичньм образом процесс повторяется при движении поршня 11 вверх благодаря наличию магнита 4. Таким образом, в процессе колебаний подвешённог 5 к полиспасту груза происходит рассеяние энергии
О
(Как при движении поршня 11 вниз, так и при движении вверх, вследствие чего 5 между поршнем 6 и внутренней цилинд- рической поверхностью корпуса 1 соз-
(Как при движении поршня 11 вниз, так и при движении вверх, вследствие чего 5 между поршнем 6 и внутренней цилинд- рической поверхностью корпуса 1 соз-
30
суммарное рассеяние энергии за период колебаний возрастает.
За счет разной жесткости пружин 3 и 2 перемещение верхнего поршня 11 больше, чем нижнего. При обратном ходе деталей 2,3,5 - 8,11 - 13 подвески датчик 9 перемещений через формирователь 10 сигнала подает питание в обмотку 8 возбуждения. При этом в зазоре
(Как при движении поршня 11 вниз, так и при движении вверх, вследствие чего 5 между поршнем 6 и внутренней цилинд- рической поверхностью корпуса 1 соз-
40
дается магнитное поле такой напряженности, при котором ги,1росопротивление нижнего кругового зазора не дает возможность поршню 6 перемещаться относительно цилиндра корпуса 1. В этом случае жесткость виброгасителя определяется только жесткостью верхней
пружины 2. 45 I
Датчик 9 перемещений, регулирующий
перемещение штока 7 относительно корпуса 1, вырабатывает электрический сигнал, величина которого пропорцио50 нальна относительному перемещению штока и корпуса (сжатию пружин 2 и 3), причем в положении поршня, соответствующем отсутствию нагрузки, величина сигнала равна нулю (стандартный
55 датчик с реверсивным выходным сигналом) . В формирователе 10 сигнала исходный электрический сигнал ограничивается усилителем-ограничителем 17, затем дифференцируется дифференцирующий цепью 18, состоящей из последовательно включенного конденсатора и параллельно включенного резистора, постоянная времени которых выбрана с учетом возникающих колебаний виброга- 5 сителя. Полученный дифференцированный сигнал определяет фазу движения штока 7, так как производная в этом случае меняет знак. Указанный сигнал с крутым фронтом и зкспоненциальным уменьшени- О на работу крюковой подвески, ем напряжения, возникающий в момент изменения направления движения штока 7, через буферный усилитель 19, исключающий влияние последующих блоков на работу диффёренцируищей цепи, и усилитель -20 мощности подается в обмотку 8 возбуждения.
При фиксированном положении поршня 6 сначала менее жесткая пружина 2
которая освобождается в два что способствует снижению ди ких нагрузок в целом.
После снятия груза, а так работе механизма подъема в с ком режиме сигнал датчика 9 ний равен нулю или остается ным, питание на обмотку 8 во не поступает и устройство не
Формула изобрет
Подвеска обоймы неподвижн 5 полиспаста, содержащая вибро имеющий корпус, заполненный реологической жидкостью, и м верхней части этого корпуса, подпружиненный поршень со шт
плавно возвращается в исходное поло- 20 закрепленный под ним электромагнит, жение, так как происходит дросселиро- обмотка питания которого соединена с вание MFC в кольцевом зазоре между формирователем сигнала, связанного с цилиндром корпуса 1 и поршнем 11, за- датчиком перемещения штока, о т л и тем благодаря изменению по зкспоненчающаяся тем, что, с целью
циальному закону питания обмотки 8 демпфирования колебаний при различных возбуждения плавно освобождается ра- динамических нагрузках, она снабжена
нее блокированная прзгкнна 3, часть энергии которой передается на поршень 11 и шток 7 посредством дополнительного сжатия пружины 2, что в свою очередь снижает динамические нагрузки во время обратного хода штока.
I
Таким образом, наличие управляемой
блокировки поршня 6 позволяет эффек- 35 поршня, а корпус и шток выполнены из тивно гасить энергию отдачи пружин, магнитного материала.
Редактор Н.Бобкова
Составитель Р.Никашина
Техред Л.Сердюкова Корректор С.Шекмар
Заказ 1185/23Тираж 721 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
на работу крюковой подвески,
которая освобождается в два приема, что способствует снижению динамических нагрузок в целом.
После снятия груза, а также при работе механизма подъема в статическом режиме сигнал датчика 9 перемещений равен нулю или остается неизменным, питание на обмотку 8 возбуждения не поступает и устройство не влияет
на работу крюковой подвески,
Формула изобретения
Подвеска обоймы неподвижных блоков полиспаста, содержащая виброгаситель, имеющий корпус, заполненный магнито- реологической жидкостью, и магнит в верхней части этого корпуса, а также подпружиненный поршень со штоком и
чающаяся тем, что, с целью
демпфирования колебаний при различн динамических нагрузках, она снабжен
постоянным магнитом, установленным на электромагните, вместе с которым он образует дополнительный поршень с перепускными отверстиями и круговым зазором относительно корпуса, при этом этот поршень подпружинен дополнительной пружиной с большой жесткостью по сравнению с основной пружиной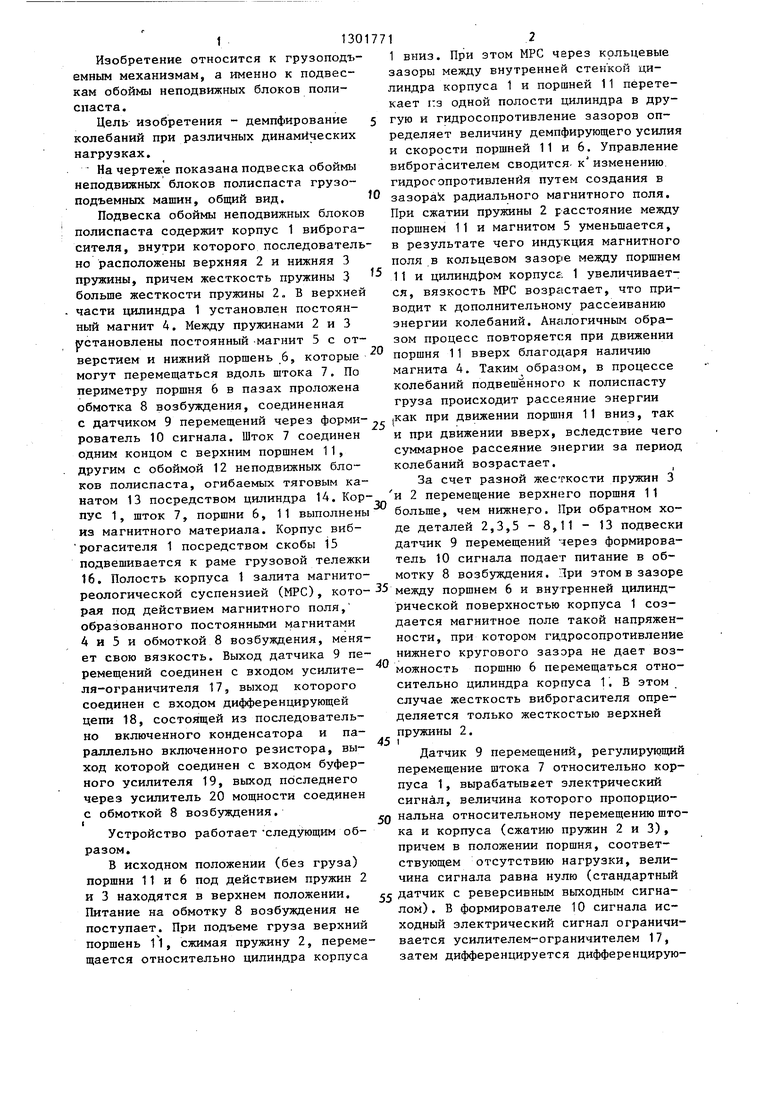
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузовая подвеска крана | 1987 |
|
SU1574529A1 |
| Подвеска обоймы неподвижных блоков полиспаста | 1984 |
|
SU1248949A1 |
| Подвеска блоков полиспаста | 1988 |
|
SU1548153A1 |
| Грузовая подвеска крана | 1982 |
|
SU1030296A1 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2605229C2 |
| Подвеска блоков полиспаста | 1982 |
|
SU1047827A1 |
| ВИБРОНАСОС | 1993 |
|
RU2066794C1 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ПОДВИЖНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2426922C1 |
| Подвеска обоймы неподвижных блоков полиспаста | 1988 |
|
SU1533996A1 |
| Подвеска обоймы неподвижных блоков полиспаста | 1986 |
|
SU1393777A1 |
Изобретение относится к области грузоподъемных механизмов. Цель изобретения - демпфирование колебаний при различных динамических нагрузках. Подвеска содержит виброгаситель, который снабжен цилиндрическим корпусом 1, заполненным магнитореологической суспензией, двумя поршнями 6 и 11, причем в пазах нижнего из них по периметру провожены обмотки возбуждения, соеди{1в«иые между собой последовательно. Двумя последовательно расположенными пружинами 2 и 3 ра:;-ной жесткости, постоянным магнитом 4, установленньм в верхней части цилиндра, и постоянным магнитом 5 с отверстием, шайбой, при этом Шайба установлена между нижним поршнем и постоянным магнитом, формирователем 10 сигналов и датчиком 9 перемещений. Предлагаемая конструкция подвески обойм неподвижных блоков полиспаста обеспечивает демпфирование колебаний поднимаемого груза различных масс, снижает динамические нагрузки в упругих элементах крана и вредное воздействие колебаний моста на организм крановщика. 1 ил. с $б сл
| Подвеска обоймы неподвижных блоков полиспаста | 1981 |
|
SU954368A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
