Фиг.З
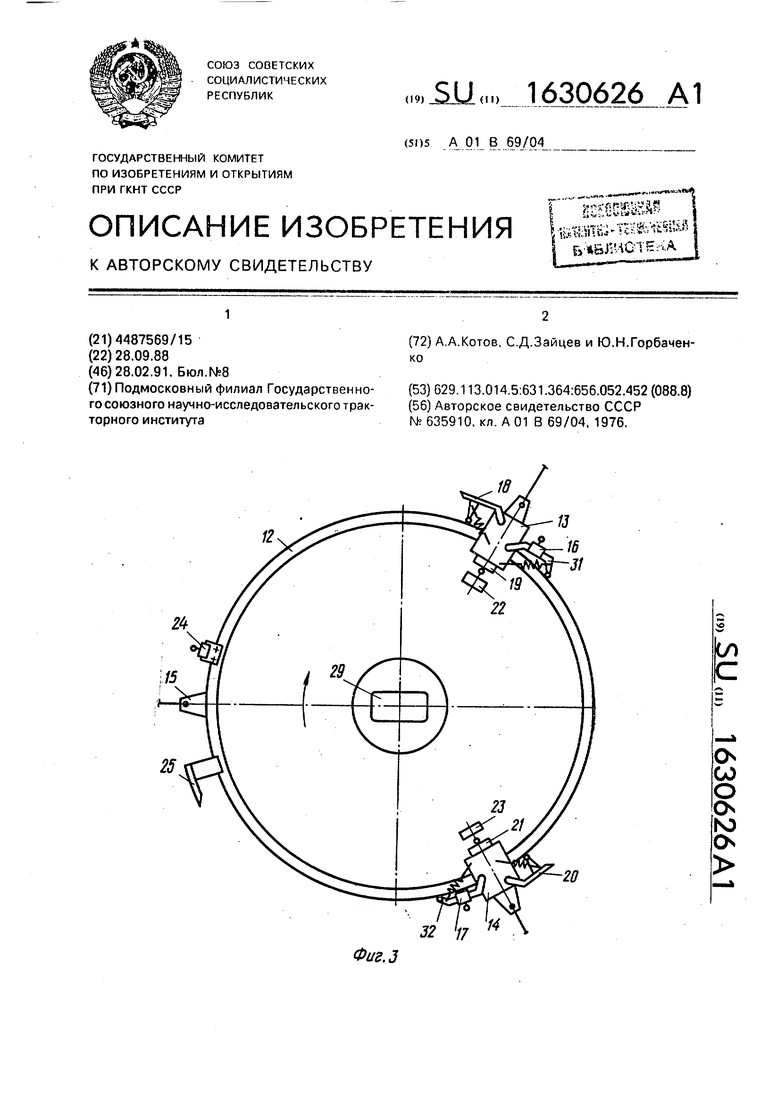
(54) СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРОВ ПРИ ИСПЫТАНИЯХ НА КОЛЬЦЕВОМ ТРЕКЕ (57) Изобретение относится к сельскому хозяйству - к области сельскохозяйственного машиностроения и может быть использовано при ускоренных испытаниях группы тракторов на треке. Цель изобретения - повышение надежности и достоверности испытаний. Система автоматического вождения тракторов при испытаниях на кольцевом треке содержит поворотное устройство, выполненное в виде подвижной кольцевой направляющей, на которой размещены каретки 13 и 14, закреплена скоба 15. Поворотное устройство с помощью стойки закреплено на опоре в центре трека, на котором располагаются тракторы, соединенные тросами со скобой 15 и каретками 13 и 14. Датчики сближения каждого из тракторов с впереди идущим трактором и датчики положения всех тракторов, кроме первого трактора, выполнены в виде конечных выключателей 16, 17, 22, 23, 24,
взаимодействующих с копирами 20, 25,19,21,18 соответственно. Контакты конечных выключателей включены в схему блока логики, которая обеспечивает остановку трактора при его недопустимом сближении с впереди идущим трактором через цепь управления сервоприводами исполнительных механизмов трактора. Движение тракторов возобновляется после их возврата в первоначальное положение. Программа испытаний тракторов задается программным устройством, подключенным через токосъемник 29 к сервоприводам исполнительных механизмов управления тракторами. 3 з.п.флы. 5 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического направления движения тракторного поезда при испытаниях на треке | 1978 |
|
SU677700A1 |
| Устройство автоматического вождения сельскохозяйственного агрегата | 1982 |
|
SU1042638A1 |
| ПРИБОР ДЛЯ ИСПЫТАНИЯ ТКАНЕЙ НА СДВИГ | 1973 |
|
SU382954A1 |
| Устройство для автоматического вождения транспортного средства | 1981 |
|
SU949383A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| Устройство автоматического направления движения транспортного средства с фильтром помех | 1984 |
|
SU1311640A1 |
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| Установка для отбора пробы при бурении | 1978 |
|
SU827769A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственных агрегатов | 1959 |
|
SU130256A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано при ускоренных испытаниях группы тракторов на треке.
Целью изобретения является повышение надежности и достоверности испытаний.
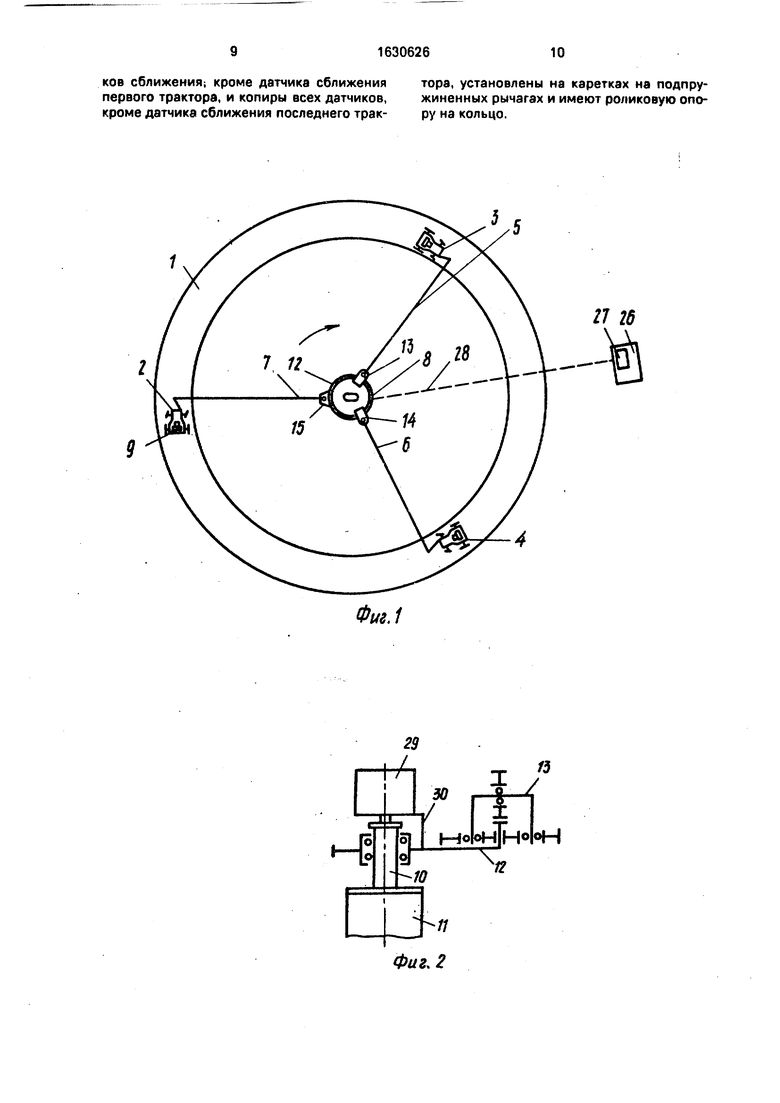
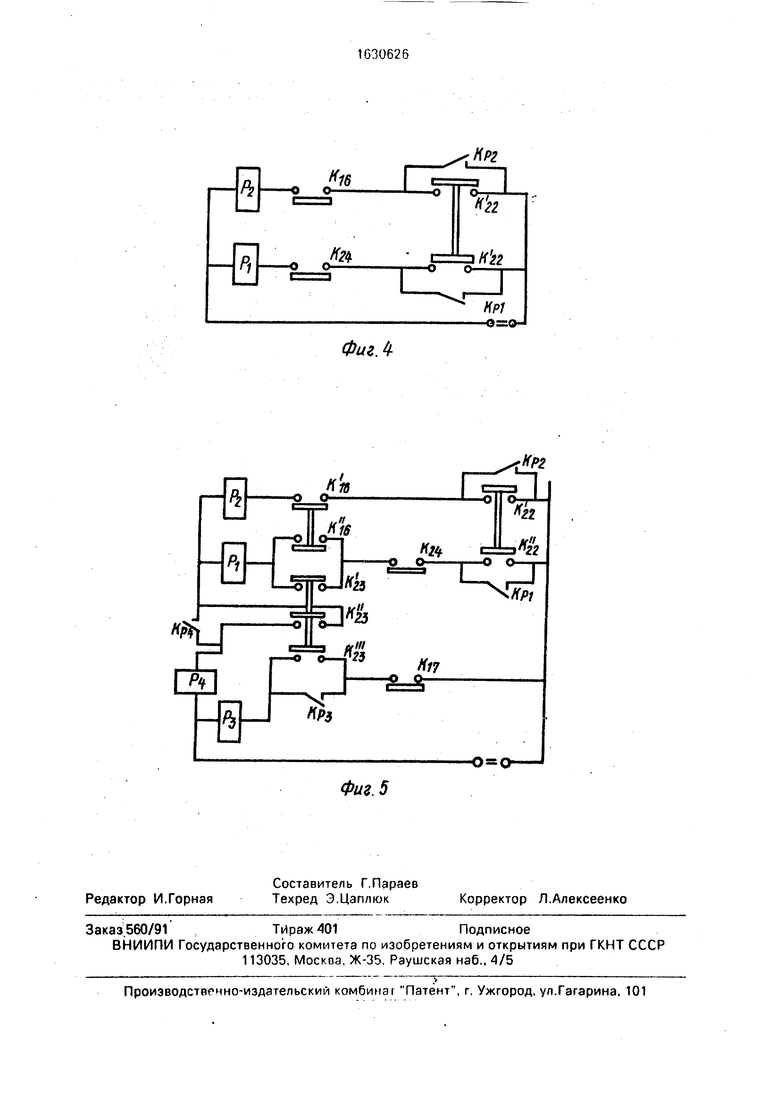
На фиг,1 приведена общая схема пред- лагаемой системы; на фиг.2 - кинематическая схема поворотного устройства; на фиг.З-схема расстановки датчиков сближения и датчиков положения тракторов; на фиг. 4 и 5 - схемы построения блока логики на релейных элементах для системы испытаний двух и трех тракторов соответственно.
Система автоматического вождения может включать несколько испытываемых тракторов, наиболее часто два или три трак- тора.
На беговой дорожке трека 1 (фиг.1) размещены тракторы 2-4, которые тросами 5-7 связаны с поворотным устройством 8. На тракторах 2-4 установлены сервоприводы 9 управления исполнительными механизмами (рычагами и педалями) тракторов. Стойка 10 поворотного устройства 8 закреплена на опоре 11 в центре трека 1. Настойке 10, как на оси, подвижно установлено (фиг.2) кольцо 12. На последнем, как на направляющей, подвижно установлены каретки 13 и 14 (тракторов 3 и 4), к которым прикреплены тросы 5 и 6. Трос 7 закреплен непосредственно на кольце 12 через скобу 15 Сдля первого трактора).
Управление сервоприводами исполнительных механизмов (ИМ) осуществляется в системе с помощью датчиков сближения каждого из тракторов по отношению к впереди идущему (число этих датчиков равно
числу испытываемых тракторов) и датчиков положения всех тракторов, кроме первого, положение которого определяется положением (углом поворота) кольца. Как датчики сближения, так и датчики положения тракторов могут быть любого типа (индуктивные, оптические, ультразвуковые и так далее). Рассмотрим датчики электромеханического контактного действия, выполненные виде конечных выключателей, взаимодействующих с копирами, установленных на каретках 13 и 14.
На каретках 13 и 14 установлены конечные выключатели 16 и 17 и копиры 18-21, а на кольце 12 закреплены конечные выключатели 22-24 и копир 25. Конечные выключатели 16. 17 и 24 могут взаимодействовать с копирами 20, 25 и 18 соответственно, а конечные выключатели 22 и 23 - с копирами 19 и 21.
На диспетчерском пункте трека 26 расположен пульт управления с программным устройством 27, которое кабелем 28 связано с неподвижной частью токосъемника 29,установленного на стойке 10 поворотного устройства 8. Подвижная часть токосъемника 29 жестко связана механической связью 30 с кольцом 12. я электрическими кабелями соединена с сервоприводами 9 управления рычагами и педалями тракторов 2-4. Конечные выключатели 16 и 17 и копиры 18и 20установлены на подпружиненных относительно корпуса кареток кронштейнах 31 и 32, второй конец которых роликом опирается на кольцевую направляющую. Конечные выключатели включены в схему блока логики, представленную на фиг.4 для испытаний двух тракторов, а на фиг.5 - для испытаний трех тракторов. При испытаниях двух тракторов с кольца 12 снимается каретка 14 и конечный выключатель 23. Конечный выключатель 22 (фиг.4) имеет две пары замыкающих контактов К 22 и , последовательное каждым из которых включены размыкающие контакты К 24 и Kie конечных выключателей 24 и 16 и обмотки реле Pi и Р2. Одна пара замыкающих контактов каждого реле PI и Р2 включена параллельно контактами К 22 и соответственно, а другая пара контактов реле Pi включена в цепь управления сервоприводом 9ИМ трактора 2, а реле Р2 - в цепь управления сервоприводом ИМ трактора 3.
При установке на испытаниях трех тракторов (фиг.2) конечные выключатели коммутируются по блокам логики схемы фиг.5. При этом нормально замыкающие контакты конечного выключателя 23 включены последовательно с размыкающими контактами KI конечного выключателя 17 и обмоткой реле Рз. Одна пара замыкающих контактов Крз реле Рз включена параллельно контактам К М23, а другая пара контактов реле Рз (не показана) включена в цепь управления сервоприводами 9 трактора 4. При этом вторая пара замыкающих контактов Юз конечного выключателя 23 включена последовательно в цепь питания реле PL а параллельно контактам К 23 включена вторая пара размыкающих контактов конечного выключателя 16. Через третью пару контактов К 23 проходит общий провод цепи питания реле PI и Р2, при этом эти контакты сблокированы контактами Крз реле Р4, обмотка которого включена последовательно с обмотками реле PI и Р2.
Система автоматического вождения тракторов при испытаниях на кольцевом треке работает следующим образом.
В начальное положение тракторы вручную трактористом устанавливаются на беговой дорожке трека 1, причем трактор 2 устанавливается в произвольном месте на треке 1. При этом кольцо 12 через натянутый трос 7 самоустанавливается так, что скоба 15 направлена в сторону трактора 2. Тракторы 3 и 4 устанавливаются так, чтобы конечные выключатели 22 и 23 при одновременном испытании трех тракторов находились на кольце 12 под углом 120° по направлению к скобе 15. Этим достигается равное расстояние между объектами испытаний по средней линии трека. При испытании двух тракторов конечный выключатель 22 устанавливается на кольце 12 напротив скобы 15 под углом 180°. При этом расстояние между объектами испытаний
равно примерно половине длины беговой дорожки.
Далее по команде с программного устройства 27 тракторы начинают движение по
5 часовой стрелке. При этом тракторы через тросы 5-7 приводят в движение кольцевую направляющую и каретки 13 и 14. Поскольку движение тракторов происходит по единой программе, то взаимного смещения направ0 ляющей и кареток не происходит. Однако вследствие различий в характеристиках движения из-за конструктивных отличий тракторов, их загрузочных устройств, расстояние между тракторами может измениться. При
5 этом изменяется взаимное расположение кареток 13 и 14 и их расположение относительно направляющей.
При испытании двух тракторов (2 и 3) изменение расположения каретки 13 отно0 сительно кольца направляющей приводит к сходу копира 19с конечного выключателя 22 и размыканию контактов К 22 и (фиг.4). При дальнейшем смещение каретки либо конечный выключатель 16 приближается к
5 копиру 25 (трактор 3 догоняет трактор 2), либо конечный выключатель 24 приближается к копиру 18 (трактор 2 догоняет трактор 3). В первом случае размыкаются нормально замкнутые контакты Kie конечного выклю0 чателя 16, обесточивается реле Р2, размыкаются его нормально разомкнутые контакты Кр2, а с других контактов, включенных в цепь управления сервоприводами 9, поступает сигнал на остановку трактора 3. Продолжая
5 движение, трактор 2 вращает кольцо 12 направляющей, копир 25 сходит с конечного выключателя 16 и замыкаются его контакты К 16 . При дальнейшем движении конечный выключатель 22 подходит к копиру 19 и замыкаются его контакты К 22 и КМ22. К элект0 рической цепи подключается реле Р2, замыкаются его контакты К 16, снимается сигнал на остановку трактора 3. Последний продолжает движение в автоматически восстановленном первоначальном положении,
5 Во втором случае размыкаются размыкающие контакты К24 конечного выключателя 24, обесточивается реле PI и, аналогично описанному, происходит остановка трактора 2 и восстановление первоначального рас0 положения тракторов.
При испытании трех тракторов (2-4) работа системы np:i изменении расположения тракторов 2 и 3 происходит как и в описанных случаях. Если трактор 4 начинает дого5 нять трактор 2, копир 21 сходит с ролика
конечного выключателя 23, размыкаются
его контакты К 23 и . При дальнейшем
движении копир 25 взаимодействует с конечным выключателем 17, размыкаются его
контакты Ki7, обесточивается реле Рз и происходит остановка трактора А и восстановление первоначального положения как описывалось для трактора 2. Если трактор 4 начинает отставать от трактора 2, то проис- ходит взаимодействие копира 20 с конечным выключателем 16, при этом размыкаются контакты K i6 и . При этом взаимодействие копира 20 с выключателем 16 происходит в том случае, если либо трактор 3 догнал трактор4(каретка 13 приблизилась к каретке 14), либо трактор 4 отстал от трактора 2 (каретка 14 приближается к каретке 13), поэтому, поскольку контакты конечного выключателя 23 разомкнуты, то происходит оста- новка обоих тракторов 2 и 3. Трактор 4 продолжает движение, замыкаются контакты К (б и , однако тракторы 2 и 3 остаются на месте, так как при размыкании контактов K ie, обесточилось реле Р4 и разомкнулись его контактыКр. При подходе каретки 17 к конечному выключателю 23 замыкаются его контакты , и , подается питание на обмотки реле Pi, Pa и Р4, они срабатывают и подают сигнал в цепь управления сервоприводами 9 на продолжение движения тракторам 2 и 3. Одновременно замыкаются контакты Kpi, Кр2 и Крз, блокируя соответствующие включенные па- уаллельно им контакты конечных выключа- телей.
Таким образом, предлагаемая система для автоматического вождения тракторов при испытаниях на треке позволяет автома- тически восстанавливать первоначальное положение тракторов на треке, обеспечивает их роботу по общей программе, способствует повышению качества работы, увеличению производительности испытаний, повышению качества испытаний тракторов.
Формула изобретения 1. Система автоматического вождения тракторов при испытаниях на кольцевом треке, включающая поворотное устройство, установленное в центре трека на вертикальной стойке с токосъемниками и связанное тросами с испытываемыми тракторами, датчики сближения каждого из тракторов с впереди идущим трактором, сервоприводы управления скоростями движения тракторов и программное устройство управления сервоприводами, установленное на диспетчерском пункте, отличающаяся тем, что, с целью повышения надежности и до- стоверности испытаний, система снабжена установленными на поворотном устройстве датчиками положения всех тракторов, кроме первого, датчик сближения которого рас- положен на поворотном устройстве,
каретками для всех тракторов, кроме первого, установленными на поворотном устройстве, выполненном в виде размещенного на стойке с возможностью вращения кольца с закрепленной на нем скобой крепления троса первого трактора, и блоком логики, входы которого подключены к датчикам сближения и к датчикам положения тракторов, а выходы - к цепям управления сервоприводами, причем тросы остальных тракторов имеют крепления на соответствующих им каретках, на которых установлены соответствующие датчики сближения этих тракторов, датчики сближения и положения выполнены в виде конечных выключателей для взаимодействия с копирами поворотного устройства, а блок логики - в виде контактов конечных выключателей и реле переключения сервоприводов исполнительных механизмов соответствующих тракторов.
тора, установлены на каретках на подпружиненных рычагах и имеют роликовую опору на кольцо.
5
П 26
Фм.1
29
/
Я
°Н
-/0
12
Фиг. 2
Фиг. 4
| Система автоматического вождения тракторов при испытаниях на полигоне | 1976 |
|
SU635910A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
