Изобретение относится к станкостроению, в частности к исполнительным механизмам металлорежущих автоматических станков, например сверлильных роботов.
Цель изобретения - упрощение конструкции, повыщение жесткости рабочего органа модуля.
На фиг. 1 изображен модуль механо- обрабатывающего робота (сверлильного) на фиг. 2 - вид А на фиг. 1.
Модуль содержит силовой цилиндр 1 с поршнем 2, фланец 3 с шестерней привода 4, узел 5 крепления инструмента 6 (сверло) за его хвостовик 7, коническую полость 8 в поршне 2 с поверхностью 9 и с кольцевым пазом 10 под разжимное кольцо 11. Фланец 3 имеет центральную часть 12, подшипник 13, собачки 14 и 15, подпружиненные пружиной 16. В инструменте 6 выполнен паз 17 под кольцо 11.
Модуль работает следующим образом.
Хвостовик 7 инструмента 6 проталкивают через центральную часть 12 фланца 3, отжимая собачки 14 и 15, и закрепляют в конической полости 8 поршня 2. Разжимное кольцо 11, разжимаясь в пределах зазора А, входит в паз 17 хвостовика 7 и удерживает инструмент 6 в поршне 2 за счет размера S хвостовика. При вращении фланца 3 с шестерней привода 4 в подшипнике 13 собачки 14 и 15 входят в контакт с инструментом 6 и начинают его вращать совместно с поршнем 2. Осевое перемещение поршня 2 обеспечивается с помощью гидравлики или пневматики и таким образом осуществляется подача в процессе резания. Вывод инструмента б из заготовки после обработки достигается при обратном ходе поршня 2. 0тжиму собачек 14 и 15 препятствуют пружины 16.
Крепление инструмента в поршне облегчает переналадку модуля на другой метод обработки при замене инструмента. Передача крутящего момента на инструмент не через
хвостовик, а с помощью храповиков 7, установленных на фланце 3, уменьшает деформации инструмента и вибрации при резании, чем увеличивается жесткость модуля в целом, прочность и стойкость инструмента 6 и точность обработки.
Формула изобретения
Модуль промышленного робота, преимущественно механообрабатывающего робота, содержащий силовой цилиндр, фланец которого кинематически связан с приводом, и рабочий орган, связанный с поршнем силового цилиндра, отличающийся тем, что, с целью упрощения конструкции и повышения жесткости рабочего органа, рабочий орган выполнен в виде стержня с винтовыми канавками и связан с поршнем силового цилиндра быстроразъемным соединением, а на фланце смонтированы собачки, подпружиненные в направлении продольной оси силового цилиндра и предназначенные для взаимодействия с винтовыми канавками рабочего органа.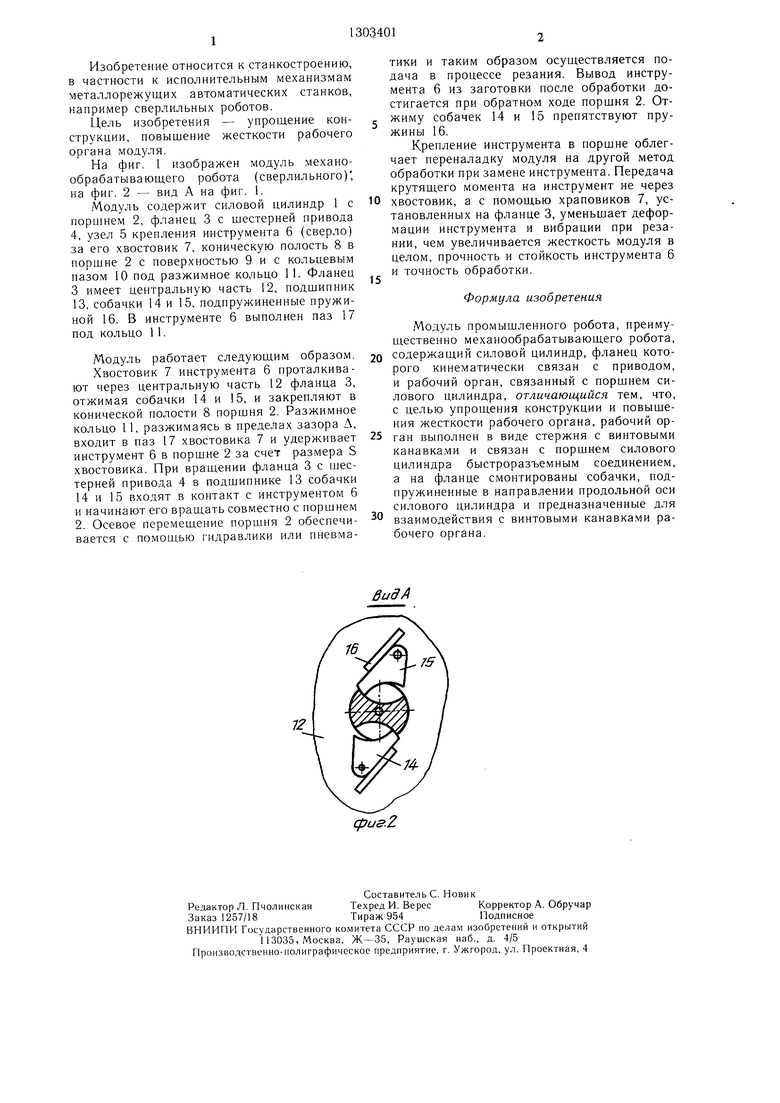
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выталкивания инструмента с коническим хвостовиком из шпинделя станка | 1975 |
|
SU566682A1 |
| Револьверная головка | 1988 |
|
SU1696158A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Устройство для закрепления деталей | 1987 |
|
SU1484552A1 |
| РУЧНОЙ ГИДРАВЛИЧЕСКИЙ РЕЗАК | 1997 |
|
RU2121433C1 |
| ДЕРЖАТЕЛЬ СВЕРЛИЛЬНОГО ПАТРОНА | 1993 |
|
RU2103116C1 |
| Устройство автоматической смены инструментов сверлильно-фрезерного станка | 1982 |
|
SU1047649A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТРУБ | 1997 |
|
RU2128277C1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Устройство для зажима инструмента | 1988 |
|
SU1579652A1 |
Изобретение относится к станкостроению и позволяет упростить конструкцию и увеличить жесткость модуля, преимущественно .механообрабатываюшего (cBep.in. ibiio- го), а также повысить стойкость инструмента путем расиоложения узла креп.юния рабочего органа, в частности хвостовика инструмента, непосредственно в поршне силового цилиндра, для этого рабочий opi an (инструмент 6) связан с пор1нне 1 2 си.чо- вого цилиндра быстроразъемным соединением, выполненным в виде разжимного ко, 1ь- ца 11, установленного в пазу 10 поршня 2. На фланце 3 силового ци, 1индра смонтированы собачки 14 и 15, подпружиненные в направлепии продо.чьпо оси си. юво- го цилиндра и предназначенные для взаимодействия с винтовы.ми канавками, вьпю.июп ными на рабочем органе 2 ил. (ппструмснтс (у. со о со 4 о yyas.i
Составитель С. Новик
Редактор Л. ПчолинскаяТехред.И. ВересКорректор А. Обручар
Заказ 1257/18Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
(pus.Z
| Сверлильный станок | 1978 |
|
SU679332A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Модуль движения робота | 1976 |
|
SU576211A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
