Изобретение относится к области станкостроения, в частности к устройствам для транспортировки заготовок и изделий от накопителя заготовок к зоне обработки и готовых изделий от зоны обработки на разгрузку вдоль оси станка.
Известны автоонераторы, нанример к токарным станкам, выполненные в виде несущей захваты каретки, перемещающейся но направляющим и фиксируемой с помощью упоров.
Цель изобретения - упростить конструкцию автооператора.
Предлагаемый автооператор отличается от известного тем, что упоры размещены на торцовых кулачках, жестко фиксируемых на размещенном в направляющих поворотном валике и смещенных друг относительно друга вдоль валика и по углу, так, что при взаимодействии их с роликом каретки валик поворачивается на определенный угол, подводя таким образом в нлоскость контакта следующий упор.
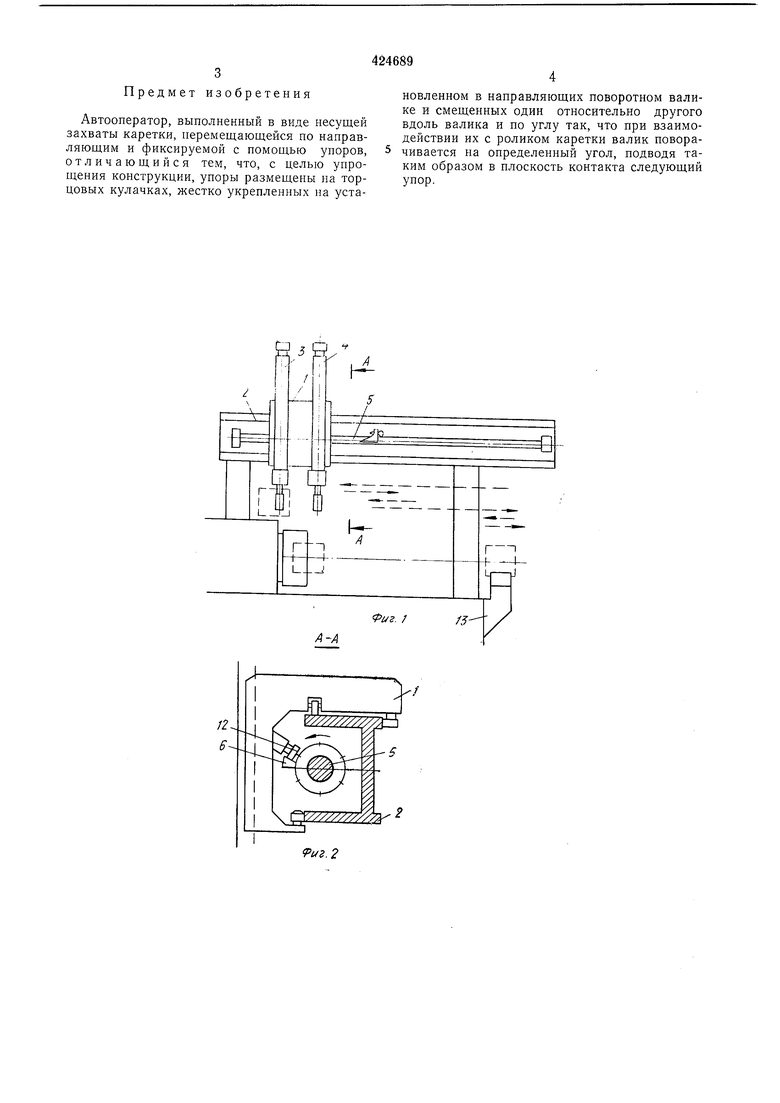
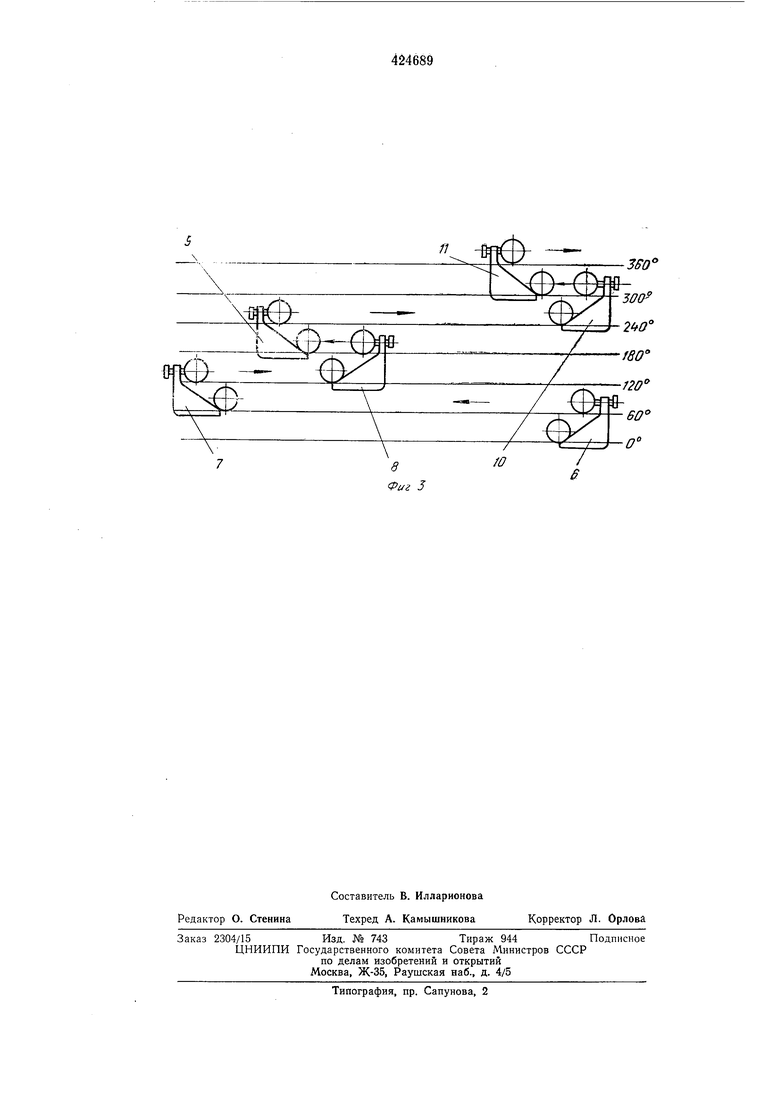
На фиг. 1 представлен предлагаемый автооператор, общий вид; на фиг. 2 - то же, разрез А-А; на фиг. 3 - развертка валика с упорами.
Автоонератор состоит из каретки 1, перемещаемой по направляющим 2, установленным на станине станка. На каретке 1 размещены рука 3 для захвата заготовок и рука 4 для захвата обработанных изделий. На на- . нравляющих 2 установлен валик 5, несущий торцовые кулачки б-11 с закрепленными на них упорами. Кулачки 6-И жестко зафиксированы на валике 5 и смещены один относительно другого но окружности на определенный угол. Каретка 1 оснащена роликом 12, контактирующим при перемещении каретки
поочередно с из кулачков 6-11.
Автооператор работает следующим образом. Каретка 1, находясь в исходном положении, определяемом упором кулачка 6, рукой 3 захватывает заготовку (муфту) с призмы 13 и
перемещается влево к зоне обработки до упора кулачка 7. После захвата рукой 4 обработанного изделия каретка 1 перемещается вправо до упора кулачка 8, а для загрузки заготовки рукой 3 - влево до упора кулачка 9.
Затем при перемещении каретки вправо до упора кулачка 10 каретка pyKoii 3 захватывает новую заготовку с призмы 13, а перемещаясь до унора кулачка 11, опускает рукой 4 обработанную деталь на ту же призму 13.
При всех этих перемещениях каретки 1 ролик 12, воздействуя на торцовую плоскость каждого из кулачков, заставляет валик поворачиваться, подготавливая таким образом
следующий нужный упор.
Предмет изобретения
Автооператор, выполненный в виде несущей захваты каретки, неремещающейся по направляющим и фиксируемой с помощью упоров, отличающийся тем, что, с целью упрощения конструкции, упоры размещены на торцовых кулачках, жестко укрепленных на установленном в направляющих поворотном валике и смещенных один относительно другого вдоль валика и по углу так, что при взаимодействии их с роликом каретки валик поворачивается на определенный угол, подводя та КИМ образом в плоскость контакта следующий упор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1969 |
|
SU344701A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Станок для деформирующего протягивания | 1985 |
|
SU1346410A1 |
| АВТООПЕРАТОР | 1971 |
|
SU305035A1 |
| Автооператор | 1978 |
|
SU860998A1 |
| Автооператор | 1980 |
|
SU876365A1 |
| Шаговый конвейер | 1978 |
|
SU749757A1 |
| Автооператор | 1973 |
|
SU446358A1 |
| АВТООПЕРАТОР | 1972 |
|
SU344960A1 |
| СТАНОК ДЛЯ СУПЕРФИНИШНОЙ ОБРАБОТКИ КОЛЕЦ | 1992 |
|
RU2033916C1 |
Й30
-А
12- 6К ф-
Ф
/7
-fSO
°
8 Фиг J
