Изобретение относится к автомат-и- эации угледобьгоающих агрегатов и комплексов, а именно к средствам автоматического поддержания заданной толщины стружки (глубины захвата выемочной машины) и обеспечения прямолинейности агрегата или комплекса в плоскости.пласта, и является усовершенствованием устройства по авт,св.№ 877058.
Цель изобретения - повышение эксплуатационной надежности и расширение области применения устройства.
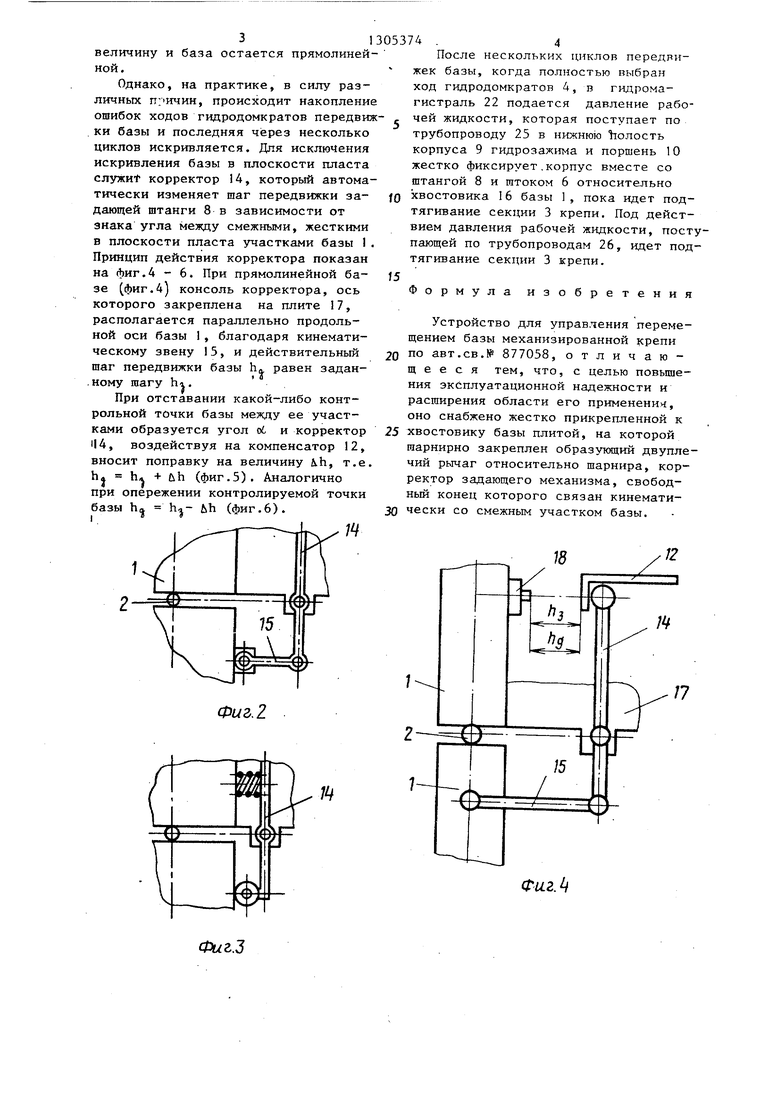
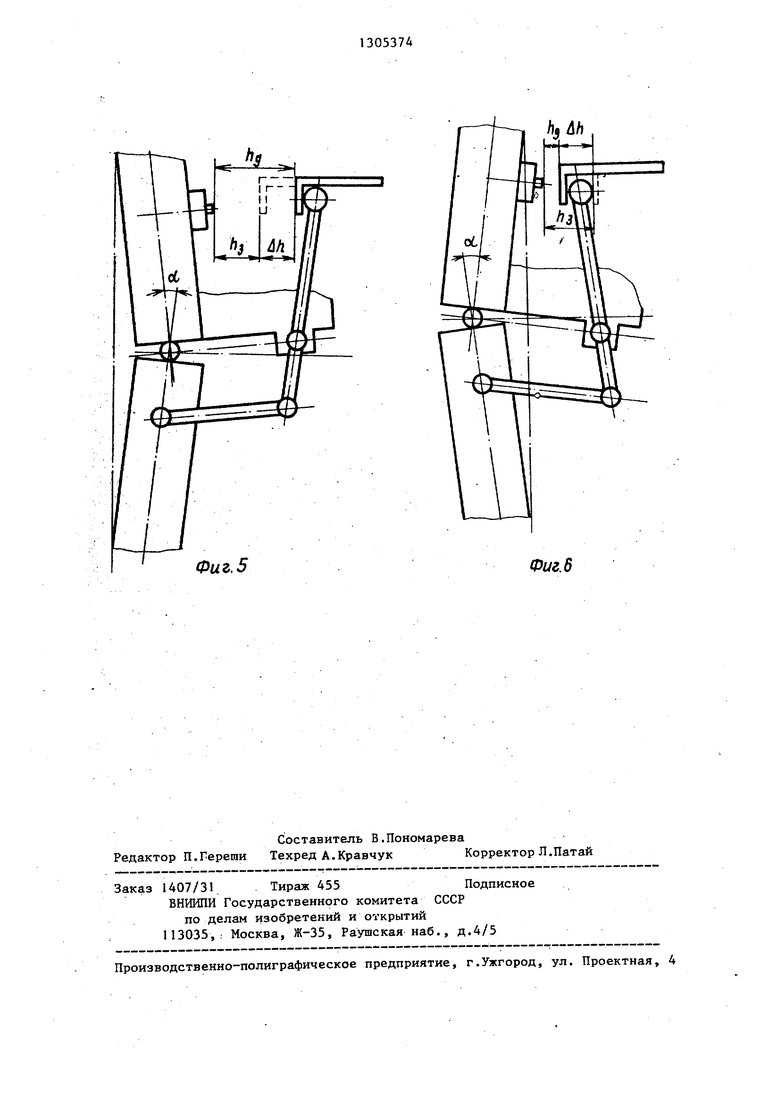
На фиг.1 показана схема задающего механизма устройства; на фиг.2 и 3 - варианты схемы кинематической связи корректора со смежным участком базы; на фиг.4 - схема действия корректора при h. г фиг.5 - то же, при ho h,,+ bh; на фиг.6 - то же, при Ь h - Ь h.
Уст ройство содержит участки базы I, выполненные из нескольких жестко соединенных в плоскости пласта секций, соединенные между собой в плоскости пласта при помощи шарниров 2. Участки базы связаны с секциями 3 крепи гидродомкратами 4 передвижения. На секциях базы, расположенных непосредственно у шарнирных.соединений ее участков, в контрольных точках установлены задающие механизмы, содержащие гидроцилиндр 5 со штоком 6 и тормозом 7, штангу 8, корпус 9 двойного гидрозажима с поршнями 10 и II, компенсатор 12 с пружиной 13, консоль корректора 14 с кинематическим звеном 15, хвостовик 16 базы с жестко закрепленной на нем плите 17 на которой закреплена ось поворота консоли корректора, гидроклапаны 18 и 19.
Давление рабочей жидкости подводится по гидромагистралям 20 - 22 и далее по трубопроводам 23 - 26.
Устройство работает следующим образом.
В исходном состоянии секции 3 крепи подтянуты гидродомкратами 4 к базе 1. Задающие штанги 8 контрольных точек базы механизированной крепи находятся в нулевом положении условной проекции их на оси X - X неподвижной системы координат плоскости угольного пласта.
Для передвижки базы на забой, в гидромагистраль 20 подается давление рабочей жидкости, которая поступает через нормально открытый гидроклапан 18 по трубопроводу 23 в верхнюю полость корпуса 9 гидрозажима и в гидроцилиндр 5. При этом порщень 11 зажимает компенсатор 12 относительно корпуса, а следовательно, и жестко закрепленные на нем штанги 8 в нулевом положении по оси X - X. Благодаря тому, что в исходном состоянии механизма, пружина I 3 прижимает компенсатор 12 к шарику корректора 14, на любом цикле передвижки базы задающий механизм начинает измерение шага ее подачи на заданную
величину h.
Под действием давления рабочей жидкости шток 6 перемещает корпус 9 гидрозажима с компенсатором 12 и штангой 8 до тех пор, пока гидроклапан 8 не перекроет гидравлический канал трубопровода 23.
При этом штанга 8 останавливается вьтоЛнив заданный ей ход и открьш . при помощи клинового выступа нормаль- но закрытый гидроклапан 19. Затем оператор на пульте управления переключает давление рабочей жидкости с гидромагистрали 20 на гидромагистраль 21 и по трубопроводам 24 давление подается в гидродомкраты 4, благодаря чему база 1 передвигается относительно неподвижных теперь штанги 8, корпуса 9, штока 6, гидроцилиндра 5 и секции 3 крепи. Тормоз
7 служит для исключения проскальзывания в гидроцилиндре штока в прог цессе передвижки базы.
Вместе с базой передвигаются жестко соединенные с ней хвостовик 16
и плита 17, на которой закреплены ось консоли корректора 14 и гидроклапаны 8 и 1 9.
После окончания заданного шага передвижки, клиновой выступ штанги 8
освобождает гидроклапан 19 и база останавливается. При этом компенсатор 12 под действием пружины 13 снова приходит в исходное состояние, прижимаясь к шарику корректора 14.
Если все контролируемые точки базы, в которых установлены указанные задающие механизмы, на каждом цикле ее передвижки получают равные перемещения, т.е. действительный шаг их
передвижки равен заданному шагу hn h (фиг.4), то стружка угля (глубина захвата выемочной машины) имеет по всей длине лавы одинаковую
величину и база остается прямолинейной.
Однако, на практике, в силу различных пг ичин, происходит накопление ошибок ходов гидродомкратов передвижки базы и последняя через несколько циклов искривляется. Для исключения искривления базы в плоскости пласта служит корректор 14, который автоматически изменяет шаг передвижки задающей штанги 8 в зависимости от знака угла между смежными, жесткими в плоскости пласта участками базы 1. Принцип действия корректора показан на фиг,4 - 6, При прямолинейной базе (фиг.4) консоль корректора, ось которого закреплена на плите 17, располагается параллельно продольной оси базы 1, благодаря кинематическому звену 15, и действительный шаг передвижки базы h. равен задан- .ному шагу hi.
При отставании какой-либо контрольной точки базы между ее участками образуется угол oi и корректор ||4, воздействуя на компенсатор 12, вносит поправку на величину h, т.е. h| h + bh (фиг.5). Аналогично при опережении контролируемой точки базы ha h (фиг.6).
После нескольких циклов передвижек базы, когда полностью выбран ход гидродомкратов 4, в гидромагистраль 22 подается давление рабо- чей жидкости, которая поступает по трубопроводу 25 в нижнюк полость корпуса 9 гидрозажима и поршень 10 жестко фиксирует.корпус вместе со штангой 8 и штоком 6 относительно хвостовика 16 базы 1, пока идет подтягивание секции 3 крепи. Под действием давления рабочей жидкости, поступающей по трубопроводам 26, идет подтягивание секции 3 крепи.
Формула изобретения
Устройство для управления перемещением базы механизированной крепи
по авт.св.№ 877058, отличающееся тем, что, с целью повьш е- ния эксплуатационной надежности и расширения области его применения, оно снабжено жестко прикрепленной к
хвостовику базы плитой, на которой шарнирно закреплен образующий двуплечий рычаг относительно шарнира, корректор задающего механизма, свободный конец которого связан кинематически со смежным участком базы.
Фиг.2
/2
;
I
15
tt
Г
Фиг.
Фиг.З
Фиг. 5
ha Ah
Фиг. 6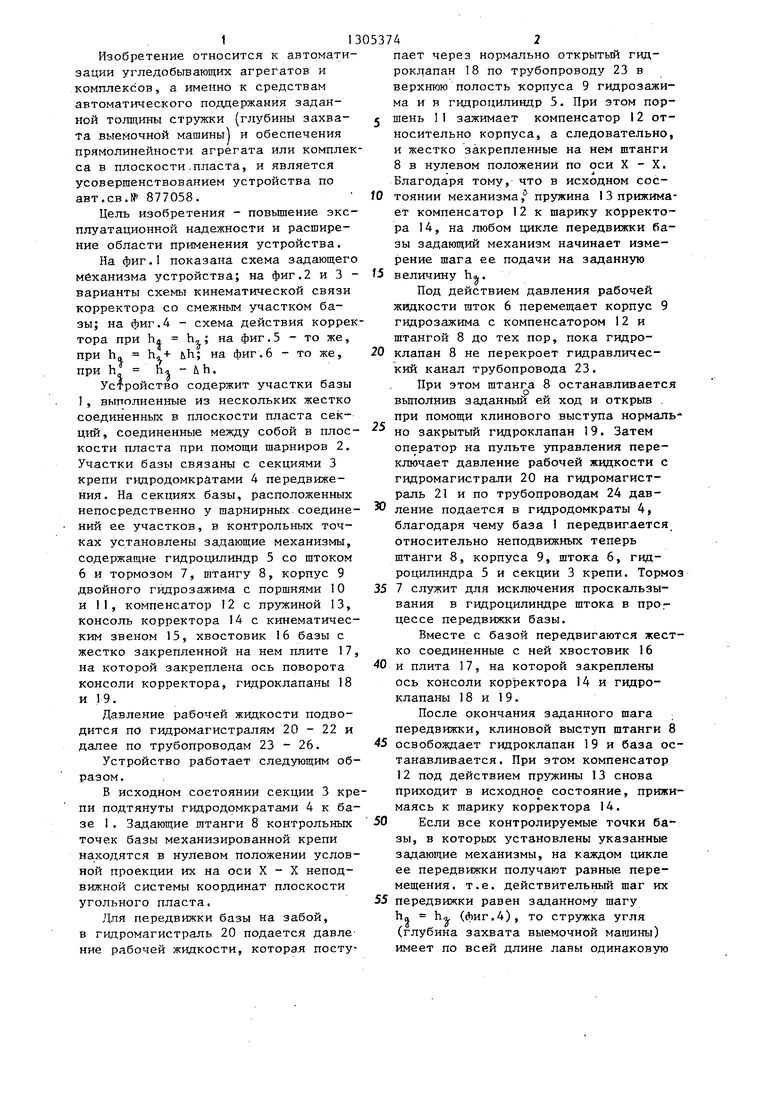
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Устройство для управления перемещением базы механизированной крепи | 1979 |
|
SU877057A1 |
| Устройство для управления перемещением базы механизированной крепи | 1978 |
|
SU727857A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Устройство для шаговой подачи базы механизированного комплекса | 1986 |
|
SU1435797A1 |
| Устройство для управления перемещением базовой балки очистного агрегата периодического действия | 1980 |
|
SU1117401A1 |
| Агрегатированная механизированная крепь | 1989 |
|
SU1739046A1 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС | 2001 |
|
RU2185514C1 |
| Механизированная крепь для отработки крутых пластов диагональным забоем | 1988 |
|
SU1612091A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2514059C2 |
Изобретение относится к автома - тизации угледобьшающих агрегатов и комплексов. Цель - повьшение эксплуатационной надежности и расширение области применения устройства. Для этого к хвостовику 16 базы 1 механи-. зированной крепи прикреплена плита 17. На последней шарнирно закреплен корректор 14 задающего механизма, кинематически связанный посредством звена 15 с базой 1. Корректор 14 автоматически изменяет шаг передвижки задающей штанги 8. При прямолинейной базе 1 консоль корректора 14, ось которого закреплена на плите 17, располагается параллельно продольной оси базы 1 , благодаря кинемати-- ческому звену 15. При отставании какой-либо контрольной точки базы между ее участками образуется угол и корректор 14, воздействуя на компенсатор 12, вносит поправку. 6 ил. с (О (О 14) Фиг.}
Составитель В.Пономарева Редактор П.Герегаи Техред А.Кравчук Корректор Л.Пат аи
Заказ 1407/31 Тираж 455Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035,; Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
