(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ БАЗЫ МЕХАНИЗИРОВАННОЙ КРЕПИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением базы механизированной крепи | 1978 |
|
SU727857A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Устройство для управления перемещением базы механизированной крепи | 1985 |
|
SU1305374A2 |
| Устройство автоматического поддержания заданной толщины стружки очистного агрегата | 1979 |
|
SU881343A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Секция механизированной крепи | 1982 |
|
SU1113562A1 |
| Устройство для шаговой передвижки базы струга | 1979 |
|
SU779576A1 |
| Механизированная крепь сопряжения | 1989 |
|
SU1717837A1 |
| Механизированный очистнойКОМплЕКС СОВМЕщЕННОй ВыЕМКи | 1978 |
|
SU798315A1 |
| Устройство для прямолинейного перемещения базы крепи | 1982 |
|
SU1116171A1 |
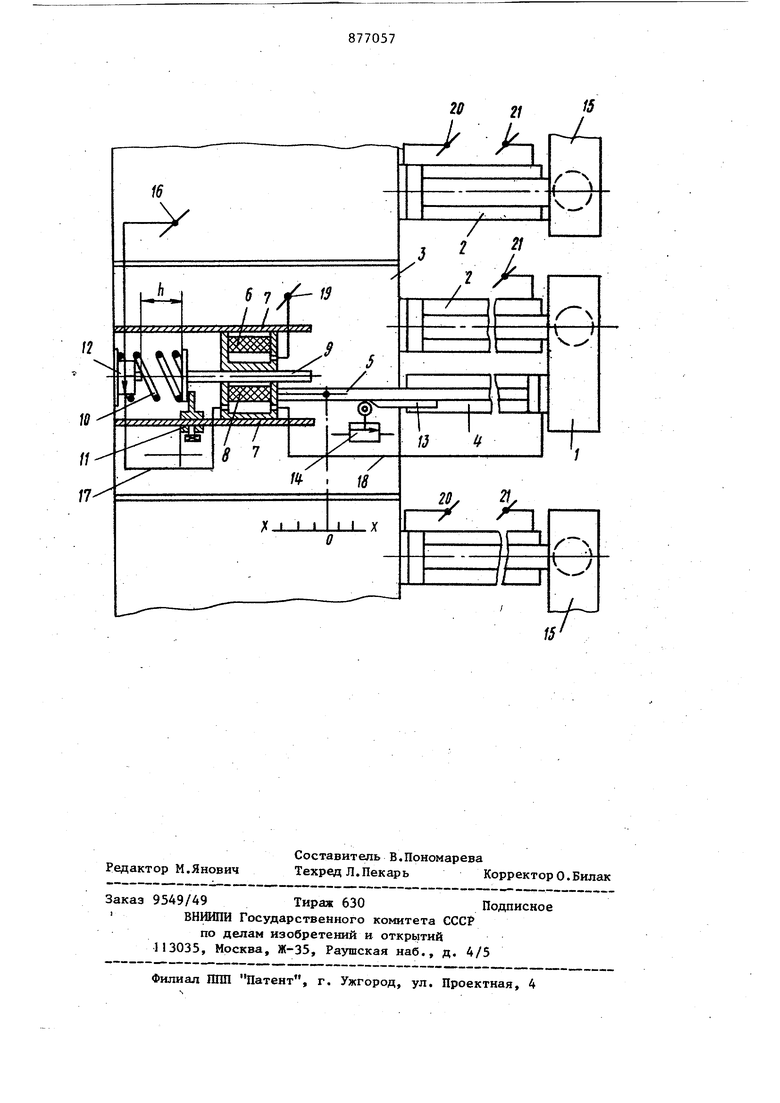
Изобретение относится к горному делу, а именно к средствам автоматического поддержания заданной толщины стружки и прямолинейности базы агрег та в плоскости пласта, Известно устройство поддержания заданной толщины стружки струговой установки, содержащее задающий элемент в виде управляющего золотника, соединенный хвостовиком с подпружиненным относительно секции базы и. пр жатым к кровле (почве) пласта ползуном гп Устройство работает следукищм. образом. Для йодачи базы на забой давление рабочей жидкости через управляющий золотник поступает в полость цилиндра домкрата передвижения базы. Так как ползун, размещенный в окне секции базы, прижат с помощью пружин к кровле, то в процессе перемещения секции базы он остается неподвижным. Перемещение базы происход до тех пор, пока управляющий золотник не перекроет доступ рабочей жидкости в гидродомкрат. Недостатком данного устройства является накопление ощибок ходов гидродомкратов и, в связи с этим, постепенное искривление базы из-за того, что корпус управляющего золотника закреплен на секции базы, а хвостовик золотника соединен с прижатым к кровле ползуном, поэтому при распоре секция базы неизбежно получает дополнительное перемещение в ту или другую сторону, нарущая, таким образом, начало отсчета для задания последующего шага передвижки базы. Наиболее близким к предлагаемому является устройство для управления перемещением базы механизированной крепи, включающее гидродомкраты передвижения для связи базы с активными и пассивными секциями крепи и задающий механизм, содержащий установленные на пассивных секциях крепи вспомогательные гидроцилиндры с управляющими элемента ш и выдвижнь ш задающими элементами, выполненными в виде штанг с гидрозажимами, которые размещены в направляющих базы с возможностью взаимодействия с управляющими элементами гидродомкратов передвижения Г2. Устройство работает следующим образом. С пульта управления оператор задает программу требуемой толщины стружки на данном цикле передвижения базы. При этом открывается электро,гидррклапан каждого вспомогательного гидроцилиндра и задающая штанга начи нает перемещаться относительно неподвижной базы, приводя в действие датчик пути. В момент, когда количес во импульсов датчика пути перемещени штанги достигнет заданной программы, оператор по показаниям счетчика отключит злектрогидроклапан вспомога-,, тельного гидпоцилиндра и щтанга будет зафиксирована в положении заданного шага перемещения базы агрегата. Недостатком этого устройства явля ется сложность конструкции, низкая эксплуатационная надежность задающего механизма (наличие электрических датчиков пути, электрогидроклапанов с-искробезопасными параметрами, реверсивного счетчика импульсов, программного блока на пульте операто ра). Цель изобретения - повышение надежности работы предлагаемого устройства. Поставленная цель достигается тем . что вьщвижные задагацие элементы имеют упоры, установленные в направляющих базы, и ползуны, связанные со щтангами посредством гидрозажимов с возможностью взаимодействия в край них положениях с упорами и управляющими элементами вспомогательных гидроцилиндров, которые закреплены на - базе. На чертеже изображена принципиаль ная схема устройства для управления перемещением базы механизированной крепи. На пассивной секции 1 крепи с отключенной от гидромагистрали поршневой полостью гидродомкрата 2 передвижения базы 3 установлен вспомогательный гидроцилиндр 4 задающего механизма. Вьщвижной задающий элемент механизма выполнен в виде штанги 5, 8 4 которая соединена с базой посредством гидрозажима 6, размещенного а направляющих базы 7, и закреплена на выдвижной части вспомогательного гидроцилиндра 4. На штанге закреплен гидрозажим 8 с ползуном 9, прижатым в крайнем правом положении пружиной 10 к упору II, закрепленному на базе. В крайнем левом положении по ходу штанги на базе закреплен управляю-, щий элемент 12 вспомог ательного гидроцилиндра, например гидроклапан. На штанге имеется фигурный выступ 13, взаимодействукнций с управляющим элементом 14 гидродомкрата передвижения (гидроклапаном) активных секций крепи 15. Соотношение количества активнь1х и пассивных секций крепи выбирается в зависимости от конструктивных особенностей конкретного типа агрегата. Давление рабочей жидкости подводится к вспомогательному гидроцилиндру 4 от гидромагистрали 16 через управляющий элемент 12 по трубопроводу 17, далее через полость гидрозажима 8 по трубопроводу 18, а к гидрозажиму 6 по гидромагистрали 19. К поршневым полостям гидродомкратов передвижения активных секций крепи давление подводится по гидромагистрали 20 (через гидроклапан 14), а к штоковым полостям гидродомкратов 2 передвижения по гидромагистрали 21. Устройство работает следующим образом. В исходном состоянии секции крепи 1 и 15 гидродомкратами 2 передвижений подтянуты к базе 3. Штанга 5 находится в нулевом положении условной проекции ее на ось Х-Х неподвижной системы координат плоскости угольного пласта. Требуемая величина перемещения базы (глубина стружки угля - h) задается путем закрепления на базе в определенном положении упора I1. Затем давление рабочей жидкости по гидромагистрали 16 подается через нормально открытый гидроклапан 12 и трубопровод 17 в полость гидрозажима 8 который при этом зажимает ползун 9 на штанге 5 в нулевом положении стружки. Далее по трубопроводу 18 давление поступает в поршневую полость вспомогательного гидроцилиндра 4 и штанга вместе с гидрозажимами 6 и 8 и ползуном 9 перемещается до тех пор, пока ползун не перекроет при помощи гидроклапана 12 nocTynJieime рабочей жидкости из гидромагистрали 16, При этом штанга 5 остановится, выполнив заданный ей ход h, и при по мощи фигурного выступа 13 включит нормально закрытый гидроклапан 14. После этого оператор с пульта управления включает давление рабочей жидкости, которая поступает через гидроклапан 14 и по гидромагистрали 20 в поршневые полости гидродомкратов 2 активных секций крепи 15, и база передвигается на забой до тех пор, пока будет включен гидроклапан 14, т.е. на заданный шаг h. Во время передвижки базы гидроклапан 12- снова открьшается, а так как давление в гидромагистрали I6 при этом не подается, то гидрозажим 8 освобождает ползун 9 и последний под воздействием пружины 10 отодвигается до упора 11 . Благодаря этому следующий сод за дающей штанги 5 на величину h начинается снова с нуля, независимо от того, с какой точностью база выполнила заданный ей на предыдущем цикле ход. Если база, в силу различных причин, выполнила ход больше или меньше заданного ей штангой, то на следующе цикле передвижки эта ошибка будет скомпенсирована. Привязка задающей штанги к пласту в данном устройстве осуществляется тем, что гидроцилиндр 4 закреплен на пассивной секции 1 крепи, проскальзывание которой в момент передвижки базы исключено, так как поршневая полость ее домкрата 2 отключена от гидромагистрали. Гидрозажим 6 во время передвижки-базы не .зажат и свободно скользит в ее направляющих 7, а трение поршня в гидроцилиндре 4 должно быть обеспечено достаточным, чтобы штанга 5 была неподвижной относительно секции 1. После нескольких циклов передвиже базы, когда полностью выбран ход гид родомкратов 2 передвижения, по гидромагистрали 19 подается давление рабочей жидкости в гидрозажим 6, а также по гидромагистрали 21 - в штоковые полости гидродомкратов активных 15 и пассивных I секций крепи. При этом задающая штанга 5 при помощи гидрозажима 6 жестко фиксируется относительно неподвижной базы 3, по7 .6 ка идет подтягивание секций крепи. Независимо от того, в каком положении поршня в гидроцилиндре 4 происходит распор пассивной секции , новый цикл передвижки штанги 5 начинается из положения, в котором она находилась на отметке по оси Х-Х предьщущего цикла. Такое выполнение устройства позволяет. упростить его конструкцию за счет исключения электрических датчиков путем специальных электрогидроклапанов с искробезопасными параметрами, реверсивного счетчика импульсов, программного блока на пульте оператора и электрических линий связи в очистном забое. В конечном счете это значительно снижает стоимость устройства и повышает его эксплуатационную надежность. Формула изобретения Устройство для 5 равления перемещением базы механизированной крепи, включающее гидродомкраты передвижения для связи базы с активными и пассивными секциями крепи и задающий механизм, содержащий установленные на пассивных секциях крепи вспомогательные гидроцилиндры с управлякяцими элементами и вьщвижными задающи- . ми элементами, имеющими штанги с гидрозажимами, которые размещены в наравляющих базы с возможностью взаимоействия с управляющими элементами идродомкратов перед вижения, отичающееся тем, что, с целью овьш1ения надежности его работы, вывижные заданщие элементы имеют упоры становленные в направляющих базы, и олзуны, связанные со штангами посредтвом гидрозажимов с возможностью заимодействия в крайних положениях упорами и управляющими элементами спомогательных гидроцилиндров, котоые закреплены на базе. Источники информации, ринятые во внимание при экспертизе Ii Авторское свидетельство СССР 381786, кл, Е 21 О 23/00, 1972. 2. Авторское свидетельство СССР о заявке 2654481/03, ь. Е 21 D 23/12, 1978 (прототип).
15
20
21
