4
со
С71
СО
Изобретение относится к средствам механизации очис,тных работ в угольной промышленности и предназначено для использования в струговых комплексах и агрегатах.
Цель изобретения - повышение точности поддержания заданной величины шага подачи базы при упрошении конструкции.
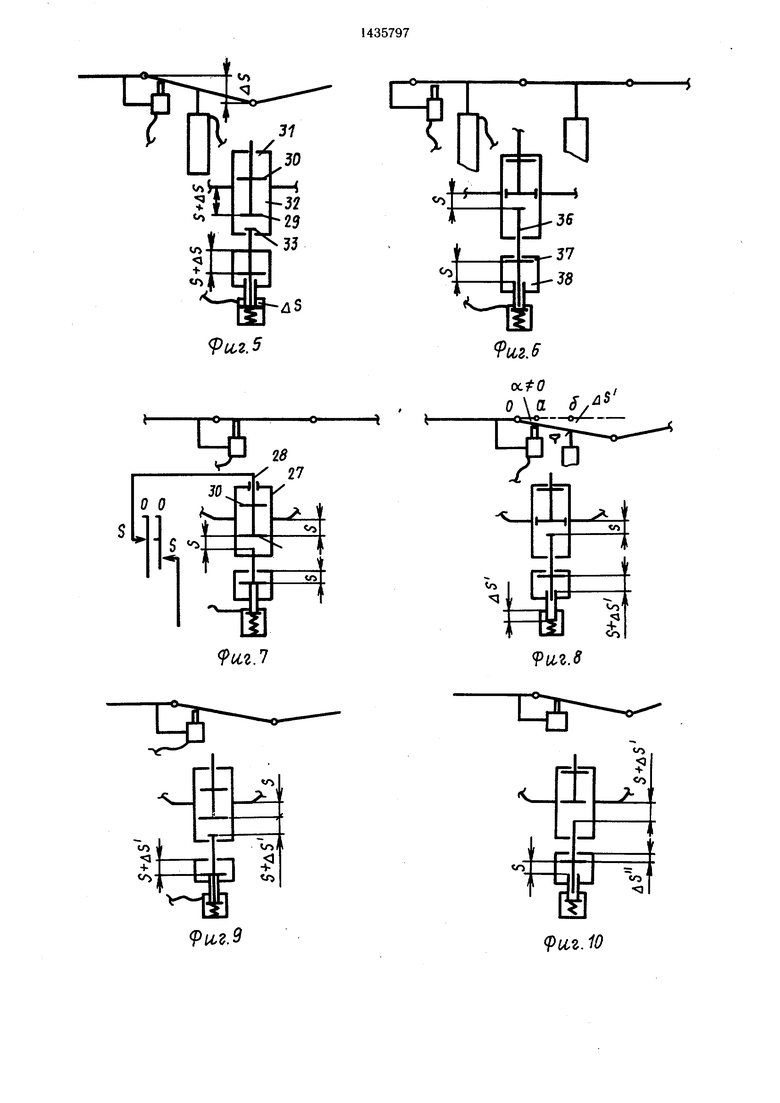
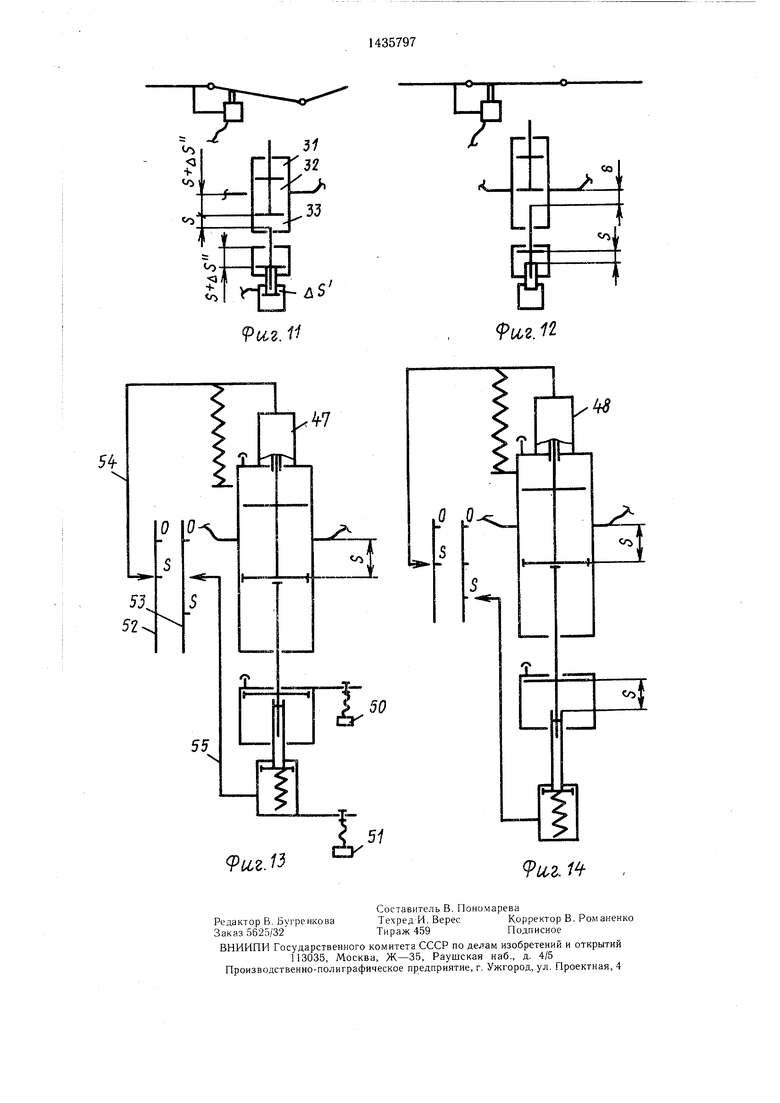
На фиг. 1 изображена принципиальная схема устройства; на фиг. 2 - исходное положение элементов задаюшего механизма; на фиг. 3 - положение элементов задающего механизма в конце шага подачи при попадании кусков породы (угля) между забоем и i-й секцией; на фиг. 4 - условный профиль почвы в направлении подачи i-й секции базы; на фиг. 5 - исходное положение элементов задаюшего механизма после прохода струга перед следуюш,им шагом; на фиг. б - конечное положение элементов задаюцхего механизма после выполнения последующего шага подачи и коррекции; на фиг. 7 - исходное положение элементов задающего механизма; на фиг. 8 - положение элементов задающего механизма и секций базы в конце шага при перемещении секции по профилю согласно фиг. 4; на фиг. 9 - положение задающего механизма перед последующим шагом; на фиг. 10 - положение в конце последующего хода до.коррекции; на фиг. 11 - задающий механизм перед третьим шагом; на фиг. 12 - конечное положение в конце третьего шага после коррекции; на фиг. 13 - установка указателя на отметку S рукояткой; на фиг. 14 - то же, путем смещения корпуса корректора пути.
Устройство состоит из секций 1 мехк)е- пи, струга 2, секций 3 базы (конвейера). Струг перемещается по лаве тяговой цепью 4 посредством приводов 5. Подача базы (конвейера) на забой осуществляется гидродомкратами 6 подачи.
На каждой второй секции крепи установлен задающий механизм 7, выполненный в виде регулятора 8, корректора 9 щага и корректора 10 пути, причем регулятор, корректор шага и корректор пути представляют собой единый кинематически связанный узел (количество секций, на которых устанавливаются задаюшие механизмы, определяется при проектировании), гидрораспределители (золотники) 11 -15 и обратные клапаны 16-19. На пульте 20 управления имеется золотник 21 и индикаторы 22 и 23.
На каждой второй секции базы конвейера установлены механизмы рассогласования секций базы в виде гидропатронов 24, гидравлически связанные с верхней полостью 25 (фиг. 4) корректора пути трубопроводом 26.
Гидропатрон устанавливается так, чтобы в выдвинутом положении -шток контактирует с бортом секции базы (при этом угол относительного изгиба смежных секций равен 0).
Регулятор состоит из корпуса 27 и штока 28.
Жестко установленные на штоке поршень 29 и дополнительный поршень 30 (фиг. 7) образуют в корпусе верхнюю полость 31, соединенную через обратный клапан с ниж- ней полостью корректора шага, среднюю полость 32, гидравлически связанную со сливной (при подаче базы) полостью гидродомкрата 6 подачи, и нижнюю полость 33, соединенную со средней полостью регулятора 8 (фиг. 11).
Пружина 34 смещает шток регулятора в нижнее положение (фиг. 1).
Нижняя полость 33 корпуса регулятора сообшена посредством золотника 12 со средней полостью 32.
5 Корректор шага выполнен в виде корпуса 35 и ограничителя 36 хода, при этом поршень ограничителя образует в корпусе верхнюю 37 и нижнюю 38 полости (фиг. 6), последняя из которых сообшена посредством обратного клапана 17 с верхней полостью 31 0 регулятора.
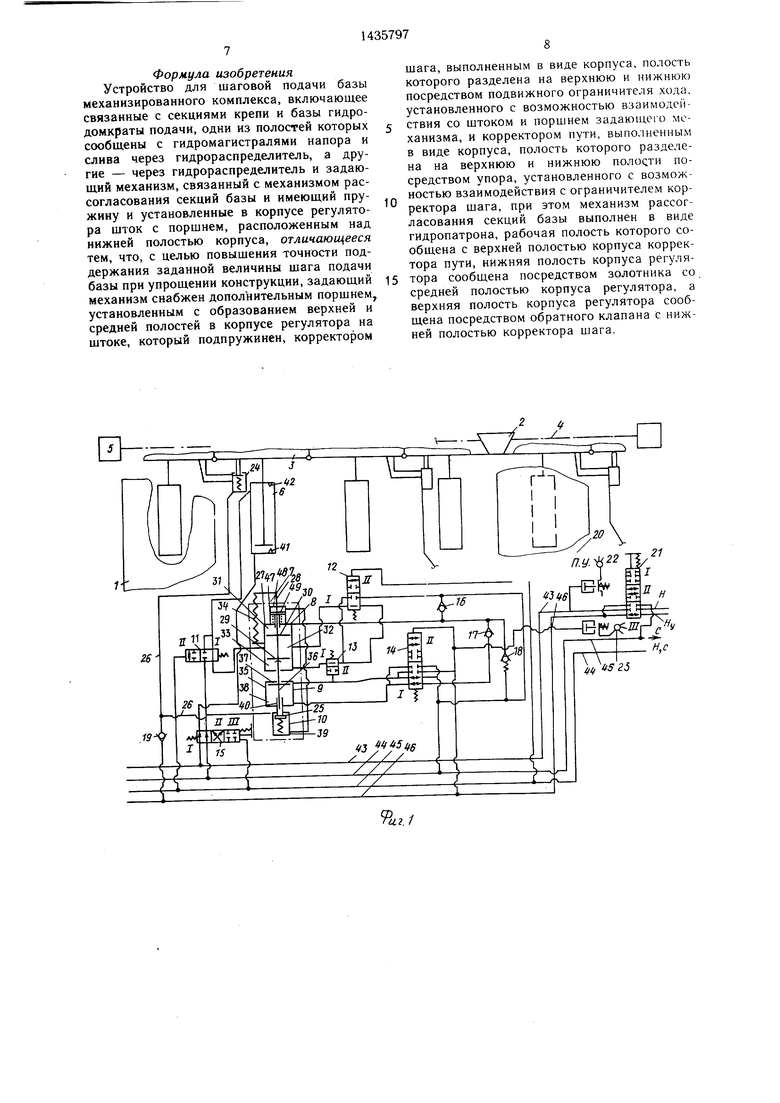
Корректор пути выполнен в виде корпуса 39 и упора 40, разделяющего полость корпуса на верхнюю полость 25 и нижнюю полости (фиг. 3).
r в гидродомкратах передвижения установлены датчики 41 и 42 конечных положений секций мехкрепи (фиг. 1). .
Гидролчидкость в систему подается по трубопроводам 43-46 (фиг. 1).
На корпусе регулятора 8 установлен ком- Q пенсатор 47 (фиг. 13), состоящий из корпуса 48 (фиг. 14) и полого штока 49 (фиг. 1).
Полый шток 49 компенсатора имеет возможность вдвигаться в верхнюю полость 3 регулятора синхронно с выдвижением упора 40 из нижней полости 38 корректора шага. 5 Этим достигается синхронность перемещения штока регулятора и ограничителя хода корректора шага при изгибах секции базы.
Для регулировки шага выдвижки .служат рукоятки 50 и 51 (фиг. 13), которые смещают вдоль оси задающего механизма кор- 0 пус корректора шага вместе со штоком регулятора и корпус корректора пути соответственно. Регулировка осуществляется относительно линеек 52 и 53 с помошью указателей 54 и 55 (фг. 13).
5 Устройство работает следующим образом.
В исходном положении секции 3 базы расположены так, что углы изгиба смежных секций равны нулю, секции 1 крепи подтянуты к базе, все золотники установлены 0 в позиции I, взаимное положение регулятора 8, корректора 9 шага и корректора 10 пути соответствует фиг. 1,
Оператор на пульте 20 управления переводит золотник 21 в позицию III, при которой жидкость под .давлением (Н.,, - 5 давление управления) поступает в трубопровод 46 и переключает золотник 14 в позицию II, при этом жидкость заполняет верхнюю полость 37 корректора 9 шага и
опускает ограничитель 36 хода до контакта с упором 40 (т. е. на величину последующего шага выдвижки).
Жидкость из нижней полости 38 корректора шага вытесняется в трубопровод 44 на слив. Одновременно с этим процессом жидкость поступает под золотник 13 и переключает его в позицию II, запирая нижнюю полость 33 регулятора 8 и удерживая шток 28 в заданном положении (фиг. 1). После того, как все ограничители 36 хода, установленные на секциях крепи, сместятся до упоров 40, давление в трубопроводе 46 резко возрастет до Н, и на пульте 20 появляется сигнал 23 (светодиод и др.). Теперь оператор переключает золотник 2i в позицию II, при которой трубопровод 46 соединяется со сливом, а трубопровод 43 с напором Нмакс ,. Золотники 13 и 14 переключаются в позицию 1 под действием усилия пружин.
Жидкость по трубопроводу 43 через золотник 15 начинает поступать в поршневую полость гидродомкрата 6 передвижения, шток которого перемещает базу на забой. Жидкость из штокоБой полости гидродомкрата 6 подачи вытесняется через золотник 11, среднюю полость 32 регулятора 8, золотники 12 и 13 в нижнюю полость 33 регулятора. Шток 28 регулятора смещается, растягивая пружину 34, при этом гидрожидкость из верхней полости 31 регулятора через обратный клапан 17 и золотник 14 поступает в нижнюю полость 38 корректора 9 шага. Поскольку соблюдается условие (т. е. рабочие площади полостей 31 и 38 равны), то скорости выдвижки штока 28 и ограничителя 36 хода будут равны и между поршнем 29 штока 28 и верхним торцом ограничителя 36 хода сохраняется зазор, равный S шагу передвижки.
Перемешение штока 28 регулятора (а следовательно и штока гидродомкрата 6 передвижения) происходит до тех пор, пока поршень 29 регулятора не перекроет трубопровод, соединяющий среднюю полость 32 регулятора с 1цтоковой полостью гидродомкрата 6 подачи (фиг. 6).
Когда процесс выдвижки прекратится по всей лаве, давление в трубопроводе 43 резко возрастет и на пульте 20 появляется сигнал 22. Оператор на пульте переводит золотник 21 в позицию 1, при которой трубопроводы 43 и 46 запираются, а затем кратковременно подсоединяет трубопровод 45 с напором, при этом золотники 12 переключатся в позицию II, соединяя нижнюю полость 33 регулятора 8 со сливом и штоки 25 под действием усилия пружины 34 смесителя вниз (фиг. 1) До контакта с ограничителем 36 хода корректора 9 шага. Между поршнем 29 и трубопроводом, идущим из штоко- вой полости ги родомкрата передвижки, опять образуется зазор, равный установленному шагу S передвижки (как показано на фиг. I).
Оператор соединяет трубопровод 45 со сливом, золотник 12 возвращается в позицию I, включается привод 5 и струг 2 тяго-. вой цепью 4 перемещается по лаве, отбивая полоску угля. Когда на пульте появляется сигнал от датчика 42, указывающий на то, что ход одного из гидродомкратов 6 передвижения полностью реализован то процесс выдвижки базы прекращается. Оператор соединяет трубопровод 45 с напором, при этом золотники 11 и 15 переключаются в позиции II и III соответственно. Штоковая И поршневая полости гидродомкрата 6 подачи запираются золотником 15 и, кроме того, золотник 11 разъединяет
5 штоковую полость с регулятором 8.
Оператор переводит золотник 21 в позицию II и рабочий в лазе осуществляет выдвижку секций известным способом.
В предлагаемом комплексе струговый конец процесса выдвижки базы на шаг опреде0 ляется положением поршня 29, при котором он перекрывает слив жидкости из штоко- вой полости гидродомкрата 6 подачи, следовательно, объем жидкости, вытесненной из штоковой полости гидродомкрата 6, должен
5 полностью поступить в нижнюю полость 33 регулятора, т. е. . Учитывая, что
лО
яОр
..ЛЬ/го г-лг - Г
И , то точность поддержания заданного шага передвижки будет 0 достигнута, если соблюдается соотношение
Р
гр .J
9
Sp
5
где Ffj - рабочая площать сливной полости гидродомкрата подачи при выдвиж- ке базы; FP - рабочая площадь нижней полости
33 регулятора; S - шаг передвижки; SP - ход штока регулятора. ... Одним из существенных преимуществ предлагаемого стругового комплекса является то, что система подачи позволяет осуществлять корректировку ощибки шага выдвижки.
Искривление базы в лаве может происхои дить по двумя основным причинам: шаг выдвижки штоков гидродомкратов некоторых секций базы различен по длине лавы по каким-то причинам (попадание кусков угля, штыба между базой и забоем и др.); при равенстве шагов различны пути перемеще- 0 ния секций базы в направлении подачи из-за гипсометрии почвы.
В соответствии с этим осуществляется коррекция по шагу и коррекция по пути. Работу корректора шага иллюстрируют фиг. 2, 3, 5 и 6.
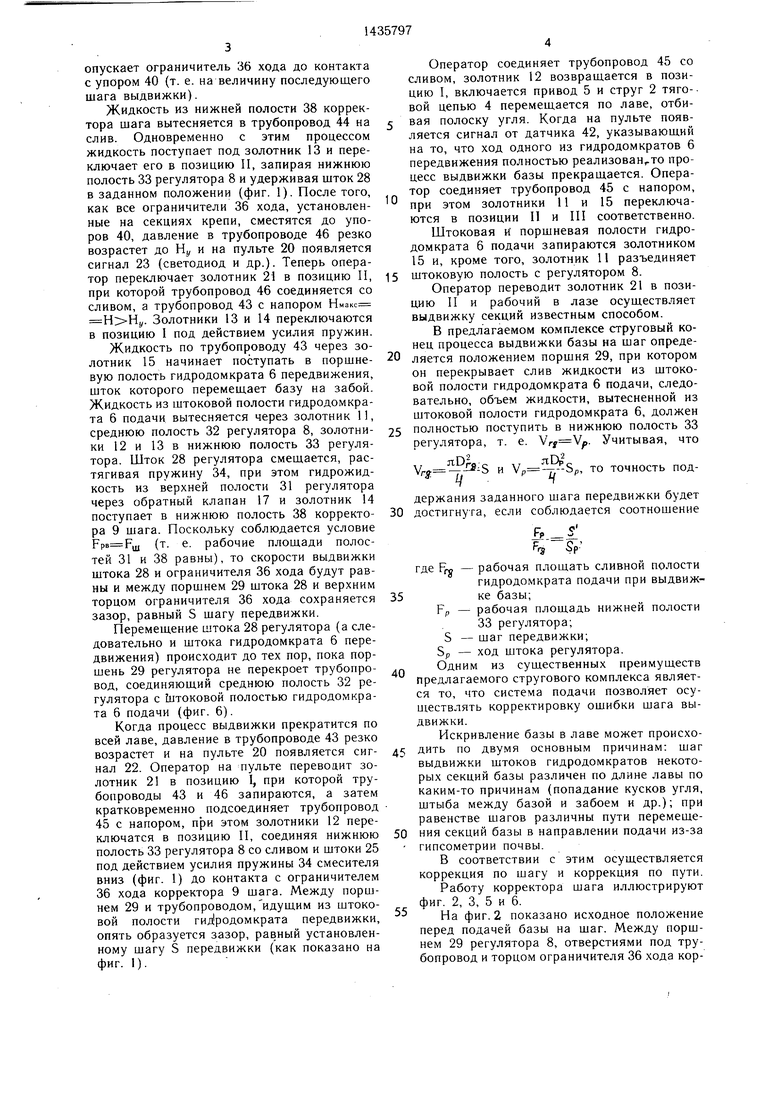
На фиг. 2 показано исходное положение перед подачей базы на шаг. Между поршнем 29 регулятора 8, отверстиями под трубопровод и торцом ограничителя 36 хода кор|Ч К1()|),; тяг,: liMiMo icH зазоры равные ша- |- S.
1 hi iJHi . . i пока.иию положение элемен- ioii ciiciL Mbi подачи при условии, что между iafxH M ii секцией базы находится препятствие (кусок угля). В этом случае шток гидродомкрата 6 подачи не додвинется на величину Л8, т. с. шаг выдержки штока будет равен S -AS, при этом ограничитель 29 хода корректора шага удерживается в промежуточном положении с помощью обратного клапана 17.
На фиг. 5 показано положение участка системы подачи после прохода струга (препятствие снято) перед процессом выдвижки на новый шаг.
Теперь шток регулятора имеет возможность переместиться на величину S-|-A.S.
На фиг. 6 показано положение базы и элементов системы подачи в конце выдвижки на шаг 5+Д5. Теперь между поршнем 29 и торцом ограничителя 36 хода образуется зазор, равный шагу выдвижки. Ошибка пре- дыдуш,его шага скорректирована при после- дуюшем шаге.
Работа корректора пути рассмотрена на фиг. 7-12, при которых показаны положения элементов системы подачи при условии равенства шагов подачи. В этом случае, если база комплекса перемешается по горизонтальному участку почвы лавы, то пути, проходимые отдельными секциями, равны и искривления не будет. В реальных условиях шахты гипсометрия почвы в направлении подачи будет различна на разных участках. Поскольку пути ()---;.AS (фиг. 4),
то на этом участке происходит искривление базы даже при равенстве шагов и угол между смежными секциями базы отличен от нуля, т. е. (фиг. 8).
На фиг. 7 показано исходное положение элементов системы подачи.
На фиг. 8 показано положение после выдвижки на шаг, равный S (при этом S, ,). .
В этом случае шток гидропатрона 24, установленный между двумя смежными секциями, изогнутыми на угол а, вдвигается в цилиндр, сжимая пружину (фиг. 1) на величину д5 (фиг. 8), и вытесняет часть жидкости в полость 25 корректора 9 пути. Упор 40 корректора пути смецдается вниз (фиг. 8) также на величину Д5
На фиг. 9 показано исходное положение участка системы подачи перед последую- ш,им шагом, величина которого равна S (т. е. в последуюшем шаге ошибка не корректируется).
На фиг. 10 показано положение системы подачи Б конце последуюшего хода - между торцом ограничителя хода и поршнем имеется зазор равный S-+-AS .
На фиг. 11 показано исходное положение элементов системы подачи перед новым шагом, который может быть осуш,ествлен на величину S-|-AS .
На фиг. 12 показано положение участка системы подачи в конце передвижки на шаг S+AS , т. е. с помощью корректора пути секции базы приведены в состояние, при котором угол а их относительно изгиба равен 0.
5
0
5
0
5
0
5
0
5
Объем жидкости, вытесненный из гидропатрона 24, должен полностью поступать в полость 25 корректора 9 пути (фкг. 8) и при этом упор 40 смещается на величину AS (фиг. 8).
Поскольку гидропатрон 24 смеш,ен на величину аб относительно оси гидродомкратов подачи, то корректор пути выполняет свои функции при условии, что Frq Sni. FnSrff к, где РГП - рабочая полость гидропатрона; Р„ - рабочая полость (полость 25) корректора пути; К - коэффициент (фиг. 8); Srn - величина смещения штока гидропатрона.
В этом случае шаг упора корректора пути равен величине AS (фиг. 8).
Если по конструктивным соображениям ход штока 28 регулятора 8 и ограничителя 36 корректора шага отличны от шага выдвижки гидродомкрата 6 подачи (т. е.
), то для того, чтобы обеспечить соот р
ветствие между смещением упора 40 корректора пути и ходом штока 28 регулятора, конструктивные параметры корректора пути и гидропатрона должны выбираться из соотношения
FrnI/ S
f- c OLS
Ha фиг. 13 и 14 показан процесс регулирования величины шага передвижки базы. Сначала устанавливают указатель 54 на отметку линейки 52, соответствующую заданному шагу S, при этом ограничитель 36 хода корректора шага должен контактировать с поршнем 29 штока 28, а упор 40-контактировать с поршнем ограничителя хода. Затем упор 40 корректора пути смещается вниз до совпадения указателя 55 с отметкой S на линейке 53. При стружке стрелки указателей 54 и 55 должны находиться против отметок О (т. е. должны совпадать), кроме этого стрелка указателя 54 должна располагаться против поршня 29.
Поскольку в предлагаемом устройстве задающий механизм выполнен как единый кинематически связанный узел, который соединен с гидродомкратами передвижения только гидравлически (посредством трубопровода), то может быть установлен в любом месте секции мехкрели без ухудшения точности поддержания заданной величины шага.
Формула изобретения Устройство для шаговой подачи базы механизированного комплекса, включающее связанные с секциями крепи и базы гидродомкраты подачи, одни из полостей которых сообщены с гидромагистралями напора и слива через гидрораспределитель, а другие - через гидрораспределитель и задающий механизм, связанный с механизмом рассогласования секций базы и имеющий пружину и установленные в корпусе регулятора шток с поршнем, расположенным над нижней полостью корпуса, отличающееся тем, что, с целью повышения точности поддержания заданной величины шага подачи базы при упрощении конструкции, задающий механизм снабжен дополнительным поршнем, установленным с образованием верхней и средней полостей в корпусе регулятора на штоке, который подпружинен, корректором
5
0
шага, выполненным в виде корпуса, полость которого разделена на верхнюю и нижнюю посредством подвижного ограничителя хода, установленного с возможностью взаимодействия со штоком и поршнем задающего механизма, и корректором пути, выполненным в виде корпуса, полость которого разделена на верхнюю и нижнюю полости посредством упора, установленного с возможностью взаимодействия с ограничителем корректора шага, при этом механизм рассогласования секций базы выполнен в виде гидропатрона, рабочая полость которого сообщена с верхней полостью корпуса корректора пути, нижняя полость корпуса регулятора сообщена посредством золотника со средней полостью корпуса регулятора, а верхняя полость корпуса регулятора сообщена посредством обратного клапана с нижней полостью корректора шага.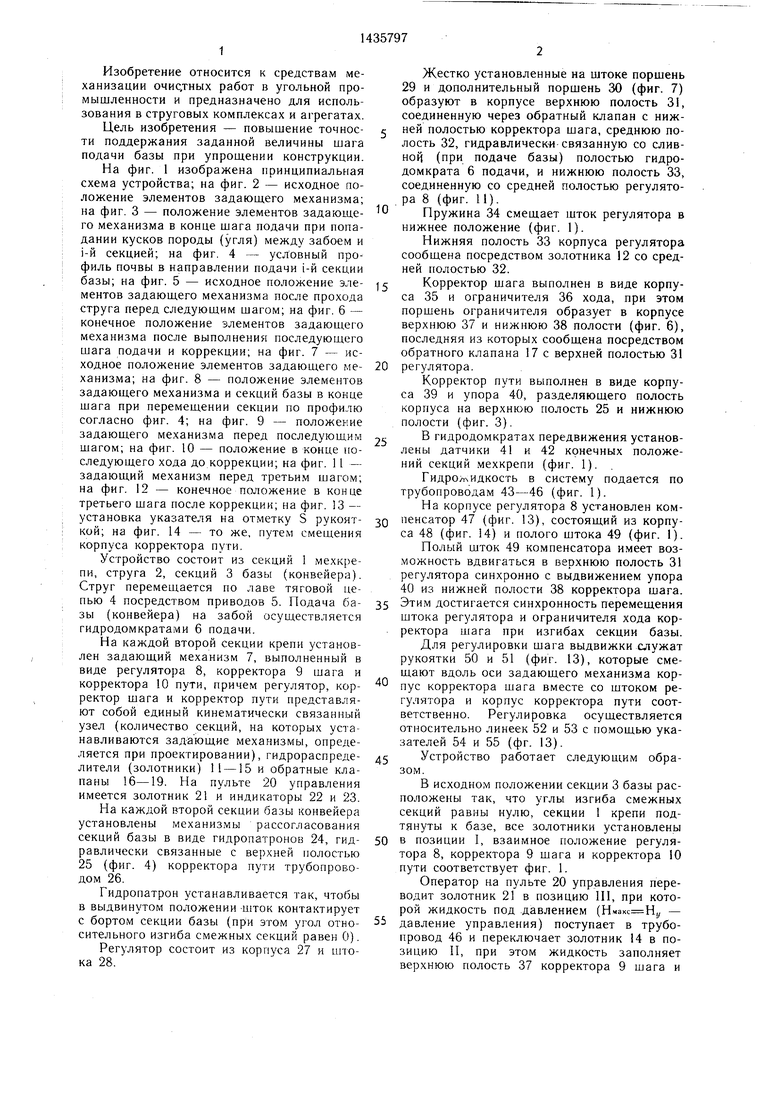

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговой передвижки базы струга | 1979 |
|
SU779576A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
| Механизированная крепь | 1988 |
|
SU1661440A1 |
| Устройство для управления перемещением базы механизированной крепи | 1985 |
|
SU1305374A2 |
| Устройство для управления перемещением базы механизированной крепи | 1979 |
|
SU877057A1 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС | 2001 |
|
RU2185514C1 |
| Система гидравлического управления секцией крепи угледобывающего агрегата | 1976 |
|
SU615231A1 |
| Устройство для обеспечения прямолинейности базы крепи | 1977 |
|
SU735795A1 |
| Устройство для передвижки секции механизированной крепи | 1988 |
|
SU1559195A1 |
Изобретение относится к средствам механизации очистных работ в угольной промышленности и предназначено для использования в струговых комплексах и агрегатах. Цель - повышение точности поддержания заданной величины шага подачи базы при упрощении конструкции. Устр-во включает связанные с секциями крепи и базы конвейера гидродомкраты (ГД) подачи. На каждой второй секции крепи установлен задаю- ш,ий механизм, выполненный в виде регулятора и корректоров (К) шага и пути. К шага выполнен в виде корпуса и ограничителя хода, а К пути - в виде корпуса и упора. Ограничитель хода К шага и упор К пути образуют в корпусах К соответственно верхние и нижние полости. На каждой второй секции базы конвейера установлен механизм рассогласования секций базы в виде гидропатронов, гидравлически связанных с верхней полостью К пути трубопроводом. Регулятор задающего механизма состоит из корпуса и штока. Жестко установленные на штоке нижний и верхний поршни образуют в корпусе регулятора верхнюю полость, соединенную через обратный клапан с нижней полостью К шага, среднюю полость, гидравлически связанную со сливной (при подаче базы) полостью ГД подачи, и нижнюю полость, соединенную со средней полостью регулятора посредством золотника. Конец процесса выдвижки базы на шаг определяется положением нижнего поршня, при котором он перекрывает слив жидкости из штоко- вой полости ГД подачи. 14 ил. S сл
fttgJ
9и.г.г
я
м
PW.2
Л5
9и,г.5
и.гЛ
v
«о
,г.
9аг.6
ос(7
(f.
9иг.8
р«,г. /
AS
9(г. f
.X
7
54ЬПр1
0
О
55
N
9и,г. /3
9иг. П
9и.г. 1
| Устройство для управления перемещением базовой балки очистного агрегата периодического действия | 1980 |
|
SU1117401A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
