Изобретение относится к системам автоматического управления и предназначено для управления динамическими объектами, параметры которых меняются в широких диапазонах произвольным образом.
Предполагается, что движение объекта описывается линейным дифференциальным уравнением п-го порядка:
у (t)4-a(t) (t) + ,...,+ +a,(t)y(t)u(t),
где a.(t) - неизмеряемые параметры объекта, меняющиеся в
W
димости выполнения условий квазистационарности. Существуют и некоторые другие подходы к управлению рассматриваемым классом объектов, основанные на методах теории инвариантности, на создании автоколебательных режимов, на использовании разрывных управлений. Однако эти подходы имеют ряд ограничений, что затрудняет их использование.
В релейных системах и в системах с переменной структурой, как правило, задача решается при возникновении
в замкнутом контуре скользящих режи- фиксированных диапазонах, ,, „
Т- мов. Их использование в ряде случаев
в главном контуре регулирования затруднено или недопустимо.
Из этого следует, что проблема эффективного управления неопределен- 20 ными динамическими системами представляет большой теоретический и практический интерес. При этом наизадаваемых известными константами а.- :
а. .a-,(t)ia (i 1,...,n).
Цель регулирования заключается в компенсации ошибки регулирования x(t), определяемой разностью x(t) y (t)-y(t), где y(t) - известное постоянное задающее воздействие, а также в обеспечении заданной динамики переходных процессов в замкнутой системе и малой зависимости свойств управляемых процессов от параметров объекта а.(t) ( ,...,n).
Известен ряд методов решения -поставленной задачи. Теоретически исчерпывающее решение в случае, когда a(t) - произвольные ограниченные параметрические возмущения дает метод глубокой отрицательной обратной связи. Требуемый результат при подобном подходе достигается при увеличении коэффициентов усиления обратной связи до бесконечности. При практическом
25
30
больший интерес представляют такие
о
ее решения, которые учитывают реальные ограничения на управляемые переменные коэффициенты передачи и позволяют использовать в основном контуре регулирования непрерывные управления. Таким требованиям удовлетворяют бинарные системы автоматического управления, основанные на принципе бинар- ности, в соответствии с которым координаты и операторы системы управления рассматриваются в виде единой сово- 35 купности ее переменных состояния.
Каждый элемент такой совокупности может выступать в качестве переменной координаты или переменной оператора. Переменные - операторы могут подприменеиии таких регуляторов замк- дО вергаться тем же преобразованиям, нутые системы управления оказываются, которые обычно совершаются над пере- как правило, неустойчивыми. Необхо- менными - координатами. Сочетание димость использования ограниченных принципа бинарности с принципом ре- коэффициентов передачи при управлении гулирования по отклонению позволяет неопределенными динамическими систе- 5 перейти к автоматическому формированию законов управления, наделяющих систему управления требуемой совокупностью свойств.
Цель изобретения - повышение помами приводит к развитию адаптивных систем. Такие системы основаны на получении с помощью прямых или косвенных оценок, меняющихся во времени, характеристик объекта и использо- д мехоустойчивости и надежности сис- вании этой информации для подстройки регулятора, чтобы поддержать свойства замкнутой системы неизменными или близкими к требуемым. Это предтемы.
На чертеже представлена схема бинарной системы управления с координатной и координатно-параметрической
На чертеже предс нарной системы упра натной и координатн
определяет возможность обоснованного обратными связями.
применения методов адаптации для управления нестационарными объектами лишь с медленно меняющимися характеристиками, что выражается в необхо
димости выполнения условий квазистационарности. Существуют и некоторые другие подходы к управлению рассматриваемым классом объектов, основанные на методах теории инвариантности, на создании автоколебательных режимов, на использовании разрывных управлений. Однако эти подходы имеют ряд ограничений, что затрудняет их использование.
В релейных системах и в системах с переменной структурой, как правило, задача решается при возникновении
больший интерес представляют такие
о
ее решения, которые учитывают реальные ограничения на управляемые переменные коэффициенты передачи и позволяют использовать в основном контуре регулирования непрерывные управления. Таким требованиям удовлетворяют бинарные системы автоматического управления, основанные на принципе бинар- ности, в соответствии с которым координаты и операторы системы управления рассматриваются в виде единой сово- купности ее переменных состояния.
Каждый элемент такой совокупности может выступать в качестве переменной координаты или переменной оператора. Переменные - операторы могут подмехоустойчивости и надежности сис-
темы.
На чертеже представлена схема бинарной системы управления с координатной и координатно-параметрической
обратными связями.
Система содержит объект 1 управления, задатчик 2 контура координатной обратной связи, реализующий сигнал у (t), блок 3 сравнения, диффеД
ренциаторы 4 ,,..,4 , модульные элементы 5,..,, первые усилители 6, первый сумматор 7, вторые усилители 8 ,...,8, второй сумматор 9, блок 10 деления, усилитель 11 с насыщением, инерционный фильтр 12, умножитель 13.
Регулятор может быть представлен следующей совокупностью соотношений:
u(t)b(t)p(t)k /x(t)/;
. ( -cJlCjU+eatCA);
5
ТйГ
,
где u(t), |M(t), А (t)
и 6 (t) сигналы различных контуров регулятора;
k , dL, S и с - параметры регулятора.
Как видно из приведеиньк соотношений, устройство управления описывается алгебраическими соотношениями и обыкновенными дифференциальными уравнениями с непрерывной правой частью.
Динамика управляемых процессов в замкнутой системе определяется корня ми полинома:
С р - -ьС,., +,...,ьСо+С,0,
где С ,...,С.- коэффициенты усилени вторых усилителей 8,,...,8 соответственно.
Очевидно, что выбором этих коэффициентов можно добиться требуемого характера поведения управляемых про- цессов в системе. Таким образом, есл полином (1) гурвицев, то при выполнении следующих неравенств на коэффициенты усиления первых усилителей Ь, , . . ,Ь и блок 13
k макс sup .Mt)J.. (2)
. Wl i1 t , t
.
oL макс sup L(Cfui)a(t) +
f(Ctu58)k° ,
, (otUI t, t
1 система асимптотически устойчива. При этом существует следующая оценка на управляемые процессы:
,
О
J5
20
25
-30
)
35
40
45
я . и
50
55
(5)
/fx(t)|/ t //x(t)ff N,. vexp (t-t )1,(4)
N и 8 - положительные константы, которые могут быть сделаны произвольным соответствующим выбором коэффициентов С и S усилителей 8,...,8, 11. Покажем справедливость последней оценки - перепишем уравнение объекта управления относительно ошибки регулирования -у в векторной форме:
(t)x+u, хек,
где A(t)eR - матрица в канонической форме,
составленная из коэффициентов a-(t) (,...,n). Перепишем последнее уравнение в координатах (х,), где x tR ,
х A, ; G аех +h0(j+C(yU, где А ,h,,a,bg,C5- параметры, ,связанные с параметрами исходной системы и вектором С оче- видньм образом.
Рассмотрим первое уравнение системы (5). Соответствующим выбором вектора С можно добиться выполнения следующего неравенства на матрицу Коши уравнения х А х :
.t) бС„ехр -6, (t-r) ;С„&,0.
При выполнении неравенств (2),(3) существует конечный момент времени t : t такой, 4To|0-|4S Я хп ,тогда, переписав первое уравнение (5) в интегральной форме, получают следующую оценку при t 5 t :
Ilx4t)/| (t, )// exp -S/t- t,)+C sup//hJl| (I x (T)/l (tr) dr,
из которого по лемме Гронуолла-Бел- мана следует оценка (4). Таким образом, из формулы (4) следует, что асимптотическое стремление -к нулю ошибки решается.
Предлагаемая бинарная система функционирует следующим образом.
Сигнал y (t), вырабатываемый за- датчиком 2, сравнивается с сигналом, поступившим с выхода объекта 1
управления,
блоке
сравнения.
Полученная ошибка регулирования x(t)
поступает непосредственно на вход первого модульного элемента 5, а на входы остальных модульных элементов 5 2,..., 5, через дифференциаторы соответствующих порядков 4,...,4„, с выходов модульных элементов 5|г ,.. ., 5 сигналы подаются через соответствующие первые усилители 6, , ..., 6 на вход первого сумматора 7. Сигнал
12947986
рической обратной связи образуется
вторыми усилителями 8 ,. . . 8 , вторым сумматором 9, блоком 10 деления усилителем 11 с насыщением и инерци онным фильтром 12.
Формула изобретени
Бинарная система управления, содержащая последовательно соединенны первый сумматор, умножитель, второй вход которого подключен к выходу инерционного фильтра, объект управл
10
Бинарная система управления, содержащая последовательно соединенные первый сумматор, умножитель, второй вход которого подключен к выходу инерционного фильтра, объект управле
ния, блок сравнения, второй вход коошибки x(t) с выхода блока 3 сравнения и сигналы с выходов дифференциаторов 4 ,...,4., через соответствующие вторые усилители 8,,...,8 подаются на вход второго сумматора 9. Полученный сигнал подается на первый j5 торого подключен к выходу задатчика, вход блока 10 деления (делимое), вто- а выход - к входам дифференциаторов, рым входом (делитель) подключенного к выходу первого сумматора 7. Сигнал, полученный на выходе блока 10 деления, является ошибкой контура координатно-параметрической обратной связи. Она последовательно подается на вход усилителя 11 с насыщением, а затем с выхода усилителя с насыщенисвоими выходами и входом блока сравнения соединенных через соответствую щие вторые усилители с входом второ- 20 го сумматора и через модульные элементы, последовательно соединенные с первыми усилителями, с входом первого сумматора, отличающая- с я тем, что, с целью повышения посвоими выходами и входом блока сравнения соединенных через соответствующие вторые усилители с входом второ- 20 го сумматора и через модульные элементы, последовательно соединенные с первыми усилителями, с входом первого сумматора, отличающая- с я тем, что, с целью повышения поем - на вход инерционного фильтра 12, 25 мехоустойчивости и надежности систе- сигнал -с выхода которого поступает на вход блока 13 умйожени, первым входом подключенного к выходу первого сумматора 7. В результате умножения образуется сигнал управления u(t), который подается на вход объекта 1 управления. В рассматриваемой системе контур координатно-параметмы, она содержит усилитель с насыщением и последовательно соединен- ,ные блок деления, первый и второй входы которого подключены соответ- 30 ственнорк выходам второго и первого сумматоров, а выход усилителя с насыщением подключен к входу инерционного фильтра.
Редактор Н,Гун ько Заказ 557/25
Составитель А.Лащев
Техред А.Кравчук Корректор И.Эрдейи
Тираж 864 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
вторыми усилителями 8 ,. . . 8 , вторым сумматором 9, блоком 10 деления, усилителем 11 с насыщением и инерционным фильтром 12.
Формула изобретения
Бинарная система управления, содержащая последовательно соединенные первый сумматор, умножитель, второй вход которого подключен к выходу инерционного фильтра, объект управлеторого подключен к выходу задатчика, а выход - к входам дифференциаторов,
ния, блок сравнения, второй вход которого подключен к выходу задатчика, а выход - к входам дифференциаторов,
j5 торого подключен к выходу задатчика, а выход - к входам дифференциаторов,
своими выходами и входом блока сравнения соединенных через соответствующие вторые усилители с входом второ- 20 го сумматора и через модульные элементы, последовательно соединенные с первыми усилителями, с входом первого сумматора, отличающая- с я тем, что, с целью повышения по25 мехоустойчивости и надежности систе-
25 мехоустойчивости и надежности систе-
мы, она содержит усилитель с насыщением и последовательно соединен- ,ные блок деления, первый и второй входы которого подключены соответ- 30 ственнорк выходам второго и первого сумматоров, а выход усилителя с насыщением подключен к входу инерционного фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1985 |
|
SU1303993A1 |
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления | 1984 |
|
SU1140095A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
| Бинарная система управления объектами с запаздыванием | 1986 |
|
SU1383294A1 |
Изобретение относится к системам автоматического управления. Цель изобретения - повышение помехоустойчивости и надежности системы. В систему введены блок 10 деления, усилитель 11 с насыщением и новые связи. Качество регулирования повьшается за счет организации дополнительной внутренней обратной связи. 1 ил. N5 CD 4 СО 00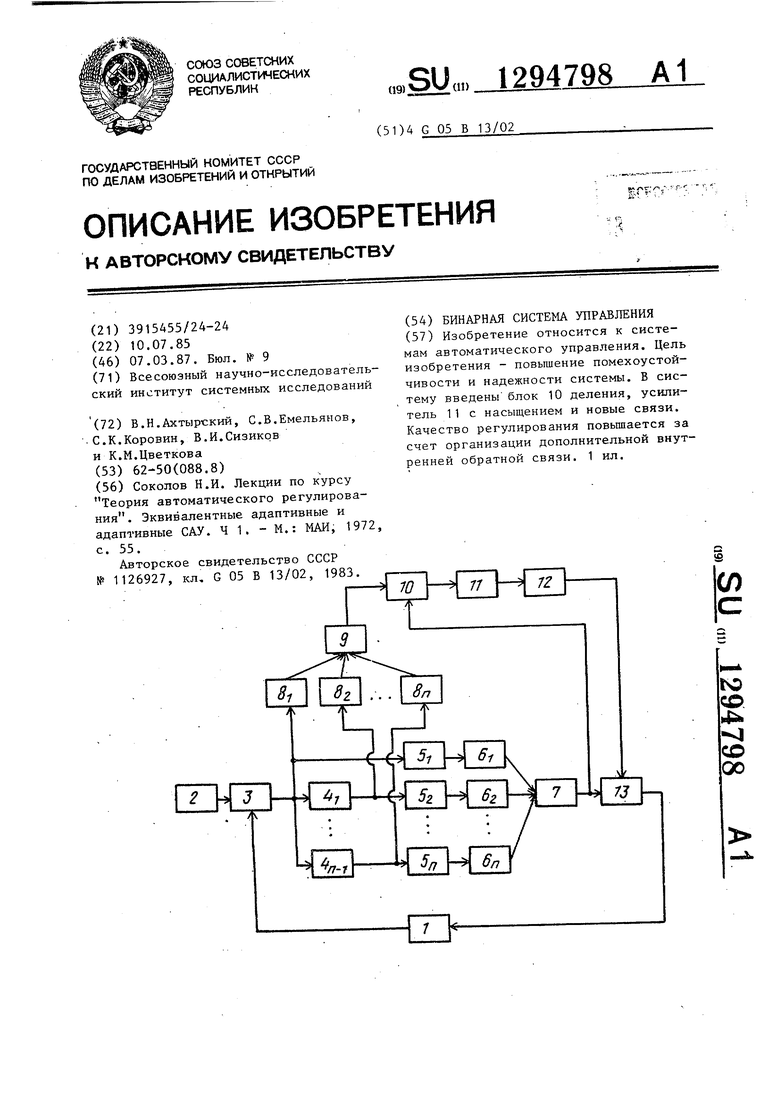
| Соколов Н.И | |||
| Лекции по курсу Теория автоматического регулирования | |||
| Эквивалентные адаптивные и адаптивные САУ | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М.: МАИ, 1972, с | |||
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Авторское свидетельство СССР | |||
