Изобретение относится к области автоматического управления и предназначено для управления неопределенными динамическими объектами, описываемыми уравнением следующего вида
yn(t)+an(t)yn-1(t)+...+ai(t)y(t)U(t). (1) .
Считается, что параметры ai(t) () меняются неконтролируемым образом в известных диапазонах
af ai(t) ai+, где ai ( ,п) - известные константы.
Задача управления состоит в сведении к нулю ошибки регулирования x(t)y(t}-ys(t), гдеу5(;}- задающее воздействие, т.е. выполнение выражения lim. II x(t) I I О, а также обеспечение йалои зависимости динамики управляемых процессов от изменяющихся параметров объекта и требуемого качества переходных процессов.
Близкой к предлагаемому решению поставленной задачи является система управления с координатно-параметрической обратной связью, содержащая последовательно соединенные первый сумматор, умножитель, первый блок сравнения, объект управления и второй блок сравнения, второй вход которого соединен с выходом ; за- датчика, а выход - со вхддами дифференциаторов, выходы которых и выход первого блока сравнения соединены че рез соответствующие первые усилители со входами второго сумматора и со входами вторых усилителей, выходы которых соединены с соответствующими входами первого сумматора, выход второго сумматора соединен со входом релейного элемента, к выходу которого подключен инерционный фильтр, выходом подключенный ко второму входу умножителя. К недостаткам описанной схемы следует отнести отсутствие требуемого качества регулирования на начальной фазе переходного процесса и значительные энергетические затраты на управление на этом этапе.
С целью повышения точности и качества работы регулятора в систему управления, содержащую последовательно соединенные: первый умножитель, объект управлеС/
С
ос
СА
V
К О
Ј
ния, первый блок сравнения, второй вход которого соединен с выходом задатчика, а выход - со входами дифференциаторов, выходы которых и выход блока сравнения через последовательно соединенные модульный элемент первой группы и усилитель первой группы соединены со входом первого сумматора, введены эталонные модели, выходы которых через последовательно соединенные блоки сравнения второй группы, вторым входом которых служат выходы дифференциаторов и первого блока сравнения, и усилители второй группы соединены со входом второго сумматора, а также через последовательно соединенные модульные элементы третьей группы и усилители четвертой группы - со входом первого сумматора: второй модульный элемент, подключенный своим входом к выходу второго сумматора, а выходом - ко входу вто- рого умножителя, последовательно соединенного с третьим сумматором, второй вход которого подключен к выходу второго сумматора, а выход - ко входу релейного элемента, последовательно сое- диненного через третий усилитель со входом инерционного фильтра, выход которого соединен со вторыми входами первого и второго умножителей.
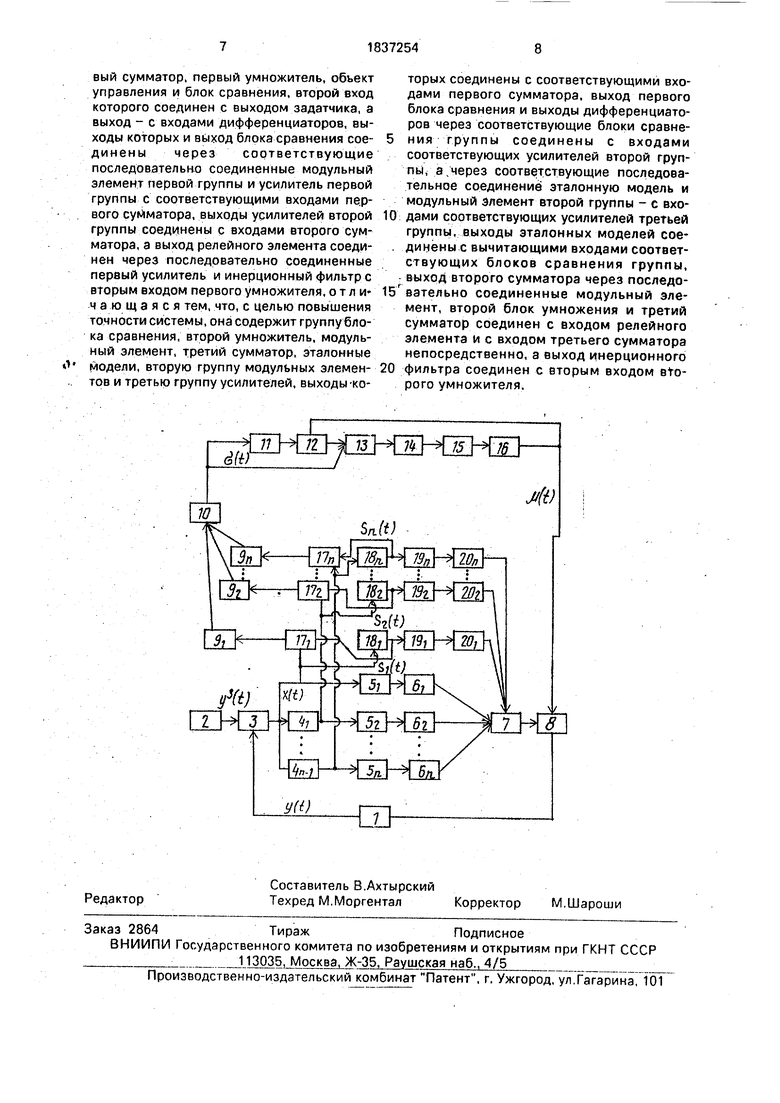
На чертеже представлена схема систе- мы автоматического управления, реализующая предлагаемый подход и являющаяся предметом настоящего изобретения. На чертеже приняты следующие обозначения: 1 - объект управления; 2 - задатчик; 3первый блок сравнения; 4i,...,4n-i - дифференциаторы соответствующего порядка; 5i,...,5n - модульные элементы первой группы; 61бп - усилители первой группы; 7 первый сумматор; 8 - первый умножитель; 9i9П - усилители второй группы; 10 - второй сумматор; 11 - второй модульный элемент ; 12 - второй умножитель; 13 - третий сумматор; 14 - релейный элемент; 15 - третий усилитель; 16 - инерционный фильтр;
17i17П - блоки сравнения второй группы;
18i,...,18n - эталонные модели, реализующие сигналы Si(t)Sn(t); 19i19n - модульные элементы третьей группы; 20i,...,20n - усилители четвертой группы.
Изобретение выполнено в рамках методологической конструкции, изложенной в 1. Получение дополнительного качества переходных процессов возможно в предлагаемой системе вследствие введения в схе-
му функциональных блоков 18118п,
выходом которых являются сигналы Si(t)Sn(t), играющие роль эталонных сигналов для управляемых процессов xi(t)Xn(t). Эталонные траектории
S(t)(Si(t)Sn(t))T могут быть наделены на
этапе синтеза системы требуемыми свойствами, например, желаемым показателем экспоненциальной устойчивости ам, т.е. MS(t) II HS(to) II ехр(ст„(м0)для всехг to,(2)
где 11 I I - знак октаэдрической нормы в Rn. Реализация эталонной модели со свойством вида (2) возможно, если, например, в функциональных блоках 18i18n присутствуют дифференцирующие звенья, охваченные отрицательной обратной связью с коэффициентом передачи (7м. Кроме указанных свойств в блоках 18i,...,18n происходит согласование начальных условий на эталонной модели и объекте управления при включении системы регулирования. Та кое согласование может быть реализовано с помощью устройства, отвечающего следующей совокупности соотношений:
S(t)AM(t)S(t);
S(tH(t)S(t)+((t))x(t);
J7(t)sgn(1- l/o(t)l);
/o(t) Јlci(xi-Sil)(l d§ISi+|x,-Sil)-1,
где AM - матрица эталонной модели; dci ( ,n) - указаны далее. Приведенный алгоритм обеспечивает при включении соотношение II x(to)-S(t0) II пб и, выбрав соответствующим образом параметр 6 , всегда гарантируется требуемая близость начальных условий на объекте и эталонной модели.
Еще одной важной особенностью предлагаемой системы является то, что функциональные блоки 18i18n в процессе
работы легко могут быть перенастроены на новые динамические свойства без перенастройки всей системы.
Остальные контуры предлагаемой системы построены так. чтобы обеспечить асимптотическое стремление управляемых процессов x(t) к эталонным траекториям S(t) или выполнению равенства llm I Ix((t) ,
где x(t)(x(t)хпЛт))т eiRn
Предложенный регулятор описывается следующими соотношениями
U(t и (t) У (К,х xi(t))+ У (K,s) Si(t) ;
i 1
i 1
/i(t)-asgn( 2, Ci(xi(t)-Si(t)+ i 1
wi
ci(xi(t)-Si(t) :t to,
где U(t) и /и (t) - выходные сигналы первого умножителя 8 и инерционного фильтра 16, соответственно; a Kix, Kis, ci(,n) и а- коэффициенты усиления, реализуемые на усилиггельных блоках 6i6n; 20i,...20n;.9i9n
5. Как видно из приведенных соотношений, функция управления остается все вре- м$ гладкой, а коэффициенты усиления - конечными, выбираемыми из следующих соотношений:
(ci- 5)Kix sup()ai(t); (С1- 5)Кг(сгн5)5м;
д crtfmax. (ci+ б )max (Kix, KIS) ; ,n,
,n
где д - некоторая константа, удовлетворяющая неравенству 0 д inln (cl. 1)
,п.
Покажем, что рассматриваемый регулятор решает поставленную задачу управления. П эеобразуем исходный объект управления (1 к матричному виду
x(ThA(t)x(t)+U(t),
элементами последней строки матрицы ) Шпхп являются параметры ai(t), ,п. ссмотрим также дифференциальное уравнение относительно новой переменной :)x(t)-S(t), eGlRn:
ё (t)A(t) E (t)+ A(t)-AMi S(t)+U(t).(3)
гДе AM elRnxn - постоянная матрица урав- ния S(t)AnS(t), отвечающего условию (2). Введя в рассмотрение еще одну переменную (7 2)ci Јi можно преобразовать
(Щ к виду
f/ A t
Ј (t)A.
G1
S(t)+H ГЯ+(JW, ,(4)
где Ј (Ј ,...Ј ,n-l) и параметры (4) некоторым образом связаны с (3). Известно, что соответствующим выбором ci, ,n сисi .Ј, . ,
тому Ј А. (t) E можно сделать асимптотически устойчивой. Кроме того, функция управления U(t), реализуемая описанным выше регулятором обеспечивает справедливость выражения
1(7 I 5 ( Не II + IISII ). Таким образом, можно сделать вывод о тЬм, что траектории асимптотически устой- 1выи справедлива оценка из (2) IxTT I I x0J I (t-to)). t t0 (5) показатель -д 0 определяется параметрами д ,Ci(,n)n д м, причем соответствующим д м можно добиться требуемого |рактера переходного процесса, при этом системе требуется перенастроить лишь Йпоки 18i18П не сменяя контуров управления. Оценка (5) доказывает, что предложенная система автоматического управления решает поставленную задачу. | Предлагаемая система функционирует следующим образом. Сигнал ys(t) поступает
e (t) -АмЈ S(t)+Hfa ;
СТЮ-А fi (t)+(A
-А/
с выхода задатчика 2 и сравнивается с сигналом y(t) - выходом объекта управления 1 в блоке сравнения 3. Полученный сигнал ошибки x(t) поступает на вход первого уси- лителя 6 через модульный элемент 5i и через дифференциаторы соответствующего порядка 4i4п-1 на входы усилителей первой группы 6а6п через модульные элементы первой группы 52,-..,5п. Сигналы с
выходов эталонных моделей 18i,...18n поступают на входы модульных элементов третьей группы 19i19П и усилителей четвертой группы 20i20n, а также сравниваются в блоках сравнения второй группы
17i17П с сигналами с выходов блока
сравнения 3 и дифференциаторов. Результаты сравнения через вторые усилители поступают во второй блок суммирования 10, который формирует сигнал координатно-параметрической обратной связи (T(t) как линейную комбинацию разности x(t) и его производных с эталонными сигналами S2(t),..,Sn(t). С выхода блока 10 сигнал (7(t) подается на вход второго модульного элемента 11, последовательно соединенного со вторым умножителем 12, а также на вход третьего сумматора 13, на вход которого подается сигнал со второго умножителя 12. Сигнал с третьего сумматора 13 через релейный элемент 14 и третий усилитель 15 подается в инерционный фильтр 16, выход которого - сигнал //(t) поступает на входы первого 8 и второго 12 умножителей. На второй вход первого умножителя 8 поступает сигнал с первого сумматора 7, на который, в свою очередь, подаются сигналы с выходов усилителей первой 6i,...,6n и четвертой 20i20n групп. Выходом первого
умножителя является сигнал управления
U(t), который поступает на вход объекта управления 1. Таким образом, блоки
2,3.,5i,..,5n; 616П; 7, 8, 19i19П;
20i20П составляют контур координатной
обратной связи, координатно-параметричеекая обратная связь включает блоки
17i....,17n;9i9п; Ю, 11. 12; 13: 14: 15; 16.
Технико-экономический эффект предлагаемой системы автоматического управления заключается в том. что она
обеспечивает экономию энергетических затрат на управление на этапе переходных процессов, а также дает возможность создания унифицированных регуляторов, обеспечивающих управление в широком
диапазоне требований к качеству управляемых процессов,
Формула изобретения Бинарная система управления, содержащая последовательно соединенные первый сумматор, первый умножитель, обьект управления и блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов, выходы которых и выход блока сравнения сое- динены через соответствующие последовательно соединенные модульный элемент первой группы и усилитель первой группы с соответствующими входами первого сумматора, выходы усилителей второй группы соединены с входами второго сумматора, а выход релейного элемента соединен через последовательно соединенные первый усилитель и инерционный фильтр с вторым входом первого умножителя, отличающаяся тем, что, с целью повышения точности системы, она содержит группу блока сравнения, второй умножитель, модульный элемент, третий сумматор, эталонные модели, вторую группу модульных элементов и третью группу усилителей, выходы-которых соединены с соответствующими входами первого сумматора, выход первого блока сравнения и выходы дифференциаторов через соответствующие блоки сравнения группы соединены с входами соответствующих усилителей второй группы а .через соответствующие последовательное соединение эталонную модель и модульный элемент второй группы - с входами соответствующих усилителей третьей группы, выходы эталонных моделей сое- динены с вычитающими входами соответствующих блоков сравнения группы, выход второго сумматора через последоватеяьно соединенные модульный элемент, второй блок умножения и третий сумматор соединен с входом релейного элемента и с входом третьего сумматора непосредственно, а выход инерционного
фильтра соединен с вторым входом второго умножителя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Бинарная система управления объектами с запаздыванием | 1986 |
|
SU1383294A1 |
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления нелинейными объектами | 1985 |
|
SU1305631A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
Изобретение относится к области автоматического регулирования и управления и выполнено в рамках бинарных систем. Предлагаемая система управления предназначена для регулирования неопределенными динамическими объектами, а также для обеспечения малой зависимости динамики управляемых процессов от изменяющихся параметров объекта и для обеспечения требуемого качества переходных процессов. Цель изобретения - повышение точности системы - достигается тем, что система дополнительно содержит группу блоков сравнения, группу модульных элементов, сумматор, умножитель, эталонные модели. 1 йл.
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
