Изобретение относится к автоматическому управлению и регулированию существенно нестационарными объектами, параметры которых и скорость их изменения произвольно изменяются в известных ограниченных диапазонах.
Предполагается, что динамический объект управления моделируется нестационарным дифференциальным уравнением п-го порядка
У(Ь + ah(t)y(rM)(t) + ...+
+ at(t)y(t) U(t),(1)
где для каждого фиксированного t t0
t -.текущее время, t0 - начальный момент времени, y(t) - измеряемый (наблюдаемый) выход объекта, U(t) управляющее воздействие, a-(t)/i 1,2,...п - переменные параметры объекта, удовлетворяющие условиям
а; a;(t) & (t).a%
(2)
где aj, at --известные минимальное
и максимальное, соответственно, значения 1-го параметра; а;,а. - известные ограничения
скорости изменения 1-го параметра.
Задача управления состоит в отработке задающего воздействия y8(t) управляемым выходом объекта y(t) с заданным значением статизма
Ф 4.
О 0
|x,(t)|J
где x,,(t) S
tit,
Д
Ч
I
y(t)-y(t)- ошибка регулирования;
; у (t) -известное задающее воздействие на объект;
- 10 - длительность переходного процесса;
А 0 - любая сколь угодно малая величина из любого начального состояния системы и при ограниченной величине и скорости изменения параметров объекта в указанных диапазонах (2), при конечных коэффициентах усиления в классе непрерывных законов управления.
Цель изобретения - повышение точности системы при неизвестном характере изменения параметров объекта.
На чертеже представлена схема бинарной системы управления.
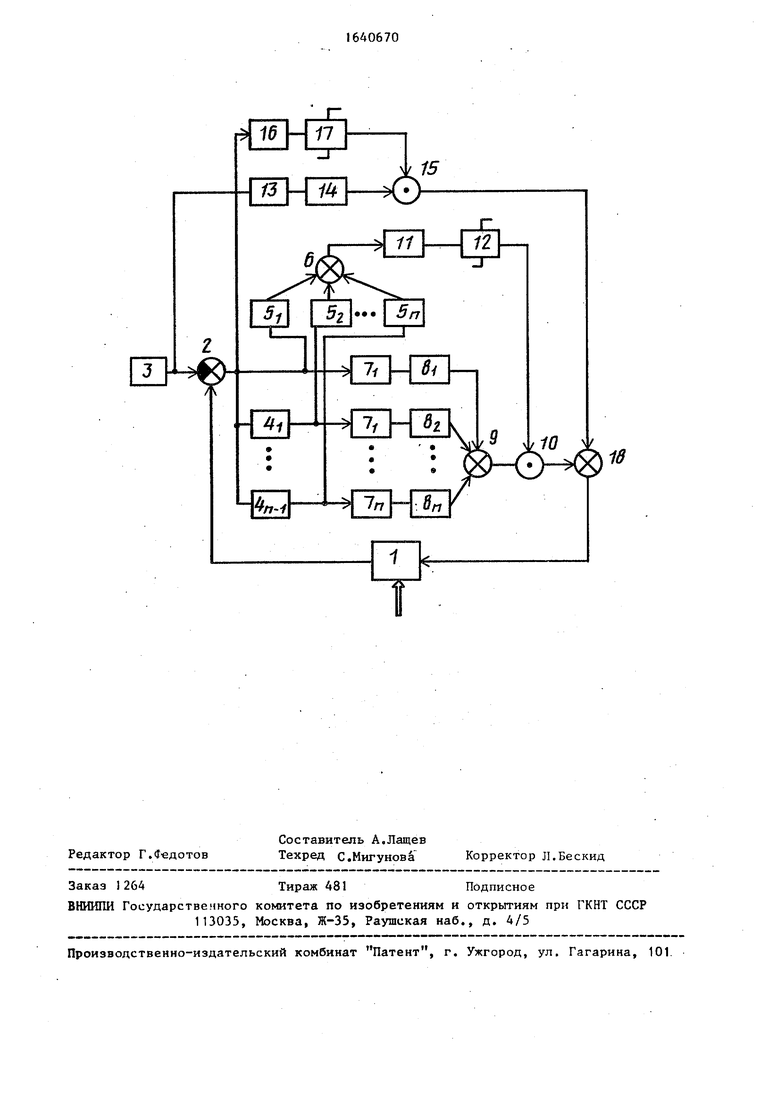
На схеме изображены последовательно соединенные объект 1 управле- ,ния, выходом которого является регулируемая координата y(t), а входом - управляющее воздействие U(t) и блок сравнения, формирующий сигнал ошибки ). Второй вход последнего соединен с выходом задатчика 3,вырабатывающего задание y(t), а выход - с входами дифференциаторов 4, формирующих производные x2(t).. .xn(t) от сигнала ошибки x(t) (координаты ошибки регулирования).
Выходы дифференциаторов 4 и блока 2 сравнения соединены через соответствующие первые усилители 5 с входами первого сумматора 6, выходом которого является ошибка (T(t) первого контура координатно-операторной обратной связи (КООС), а через соответствующие модульные элементы 7 первого контура координатной обратной связи (КОС) - с входами вторых усилителей 8. Выходы последних подключены к соответствующим входам второго сумматора 9, выход которого подключен к входу первого умножителя 10. Выход сумматора 6 соединен с входом релейного элемента I1, последовательно со диненного с интегратором 12, имеющим ограничения по выходу. Выход интегратора 12 соединен с вторым входом умножителя 10. Вход второго модуль
5
0
5
0
5
0
5
0
5
ного элемента 13, формирующего модуль от сигнала задания ys(t),подключен к выходу задатчика 3, а выход через третий усилитель 14 соединен с первым входом второго умножителя 15. Его второй вход соединен через последовательно соединенные второй релейный элемент 16, входом которого является сигнал ошибки x(t) с блока 2 сравнения, и второй интегратор 17 с ограничениями по выходу, выходом которого является сигнал-оператор (t). Умножитель 15, выходом которого является сигнал управления U(t) контура координатной обратной связи, подключен к входу сумматора 18, к второму входу которого подключен умножитель 10, выходом которого является сигнал управления Ux(t) другого контура координатной обратной связи. Сигнал управления U(t) с выхода сумматора 18 подается на вход объекта 1 управления.
работает следующим образом.
Контур, обеспечивающий устойчивость положения равновесия объекта 1 управления, работает следующим образом.
Выходной сигнал y(t) объекта 1 .управления сравнивается с сигналом у (t) задатчика 3 в блоке 2 сравнения. Полученный сигнал поступает на вход модульного элемента 7( , а на входы остальных модульных элементов 7.,,7 - через соответствующие дифференциаторы 4ц...4h., с целью получения необходимой для управления информации о состоянии объекта. Сигналы с модульных элементов через соответствующие первые усилители 84... . ..3f| подаются на сумматор 9, с выхода которого сигнал подается на первый вход умножителя 10, выходной сигнал которого U(t) подается на первый вход сумматора 18, с выхода которого сигнал U(t) подается на объект 1 управления.
Наличие интегрирующего блока 12 позволяет получить непрерывный сигнал U(t).
Второй контур, обеспечивающий заданное значение величины установившейся ошибки процесса регулирования, функционирует следующим образом,
Пропорционально модулю величины задающего воздействия ys(t) блоками 13« 14 второго контура КОС формируется дополнительная компонента управления, компенсирующая статическую ошибку управляемого процесса. В зависимости от соотношения ошибок регулирования x-(t) блоками 16 и 17 второго контура КООС формируется операторная переменная 3(t), автоматически изменяющая параметры КОС.Иными словами, контур, формирующий компоненту управления &U(t), обеспечивает инвариантность системы к возмущению, обусловленному наличием задат- чика 3.
Интегратор 17 сглаживает сигнал управления U(t).
Совокупность динамической ) и статической U.(t) компонент управления, подаваемых на сумматор 18, с выхода которого управляющий сигнал U(t) подается на вход объекта 1 управления, обеспечивает решение поставленной задачи управления.
Результаты имитации бинарной системы управления, содержащей нестационарный объект 4-го порядка,показывает принципиальную невозможность решения прототипом сформулированной задачи управления.
Предлагаемая бинарная система управления обеспечивает решение поставленной задачи слежения и заданное качество процессов для рассматриваемого класса объектов. Формула изобретения
Бинарная система управления,содержащая последовательно соединенные объект управления и блок сравне.г ния, суммирующий вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов, выходы
которых и выход блока сравнения соединены через соответствующие усилители первой группы с входами первого сумматора, а через соответствующие модульные элементы - с входами
усилителей второй группы, вы; зды которых подключены к соответствующим входам второго сумматора, выход которого подключен к первому входу первого
5 умножителя, выход первого сумматора соединен через последовательно включенные первый релейный элемент.первый интегратор с ограничением с вторым входом первого умножителя, о т0 личающаяся тем, что, с целью повышения точности системы при неизвестном характере изменения параметров объекта, в нее введены второй релейный элемент, .третий сумма5 тор, усилитель, второй интегратор с ограничением и второй модульный элемент, вход которого подключен к выходу задатчика, а выход через усилитель соединен с первым входом вто-
Q рого умножителя, ко второму входу которого подключен через последовательно соединенные второй релейный элемент и второй интегратор с огра- ничением выход блока сравнения,выходы первого и второго умножителей подключены к соответствующим входам третьего сумматора, выход которого подключен к входу объекта управления

| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1988 |
|
SU1580319A1 |
| Бинарная система управления объектами с запаздыванием | 1986 |
|
SU1383294A1 |
| Бинарная система управления нелинейными объектами | 1985 |
|
SU1305631A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| Бинарная система управления | 1984 |
|
SU1140095A1 |
| Бинарная система управления | 1985 |
|
SU1303993A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
Изобретение относится к автома- тическому управлению и регулированию существенно нестационарными .объектами и предназначено для управления с требуемым значением статизма свободным движением объекта, параметры которого и скорость их изменения произвольно меняются в известных orpaw ничейных диапазонах. Система содержит регулятор, состоящий из контура, обеспечивающего требуемые динамические характеристики процесса управления, и контура, отрабатывающего заданное значение статизма. Для компенсации статизма процесса регулирования, обусловленного нестационарностью параметров объекта, в регулятор дополнительно введены второй контур обратной связи с регулятором и второй контур координатно-операторной обратной связи с задатчиком динамических СВОЙСТВ. 1 ИЛ .(5 8
I
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
