«
(Л
е)
чение возможности регулирования объектов с запаздыванием, повьпаение помехоустойчивости, грубости к реализации элементов и надежности системы управления. Устройство содержит объект 1 управления, блок 2 сравнения, зрдатчик 3, дифференциаторы , соответствующих порядков, модульные элементы 5,-5, 16, сумматоры 6,9,11, 17,23,28, усилители 7 ,8, -8„, 13, 20,7.2,26,27, релейные элементы 18,12, 10,умножители 15,19,24, источник 21 постоянного напряжения, интеграторы 14, 25. Предполагается, что динамика управления описьшается уравнением: у(+ a(t)... а, (t).y . u(t - o(t)), где. a;(t) - переменные
параметры объекта, меняющиеся в известных пределах & a;(t) at,
1 1VIQ.О T 5T Cir4fnTl-tIf-
п.
а . - известные
константы; (7(t) - переменное запаздывание по времени в канале управления, удовлетворяющее условию: 0
6 С (t)
, где Ср - известная
константа. Задача управления состоит в сведении к нулю ошибки регулирования x(t) ., у (t) - y(t) (далее считается y(t) const о) прн любом начальном состоянии и при обеспечении условий малой зависимости свойств управляемых процессов в замкнутой системе от параметров объекта управления и величины запаздьшания в канале регулирования. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1990 |
|
RU2047887C1 |
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Бинарная система управления нелинейными объектами | 1985 |
|
SU1305631A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 1998 |
|
RU2148269C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
Изобретение относится к автоматическому управлению и регулированию и предназначено для автоматического управления свободными колебаниями линейных динамических объектов с суще-, ственно нестационарными параметрами, меняющимися неконтролируемым образом в ограниченных пределах и переменньм временем запаздьшания в каналах управления. Цель изобретения - обеспе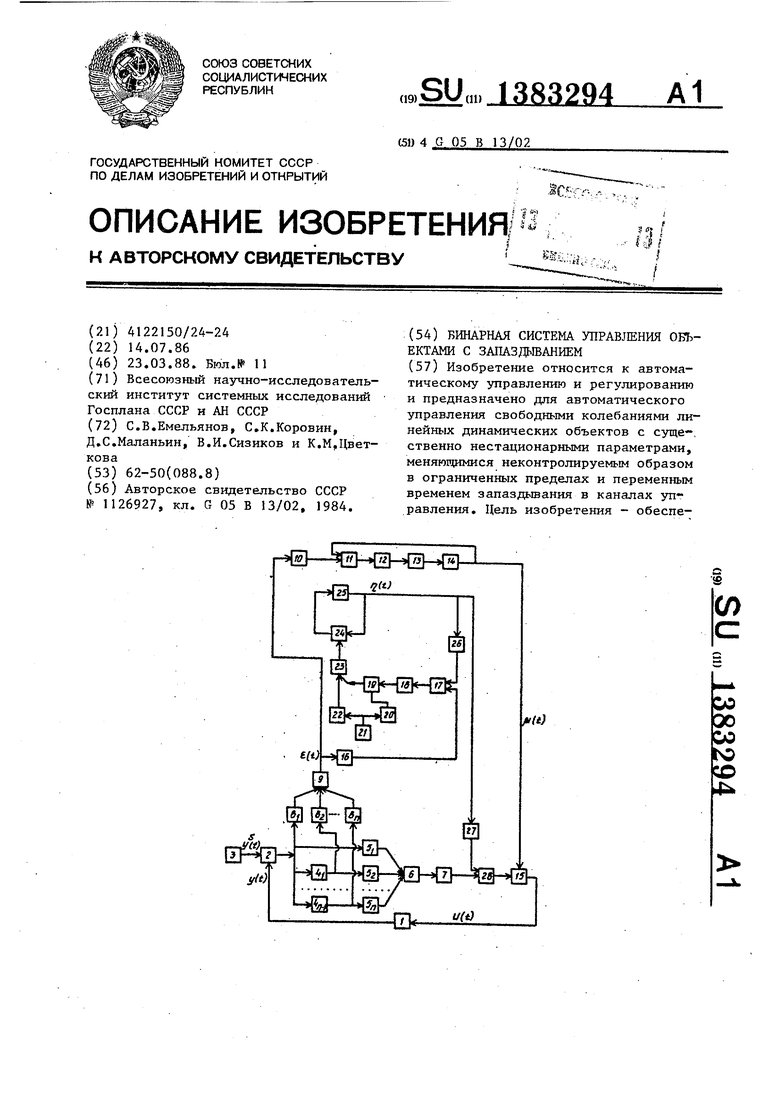
1
Изобретение относится к области г автоматического управления и регулирования и предназначено для автоматического управления свободными колебаниями линейных динамических объектов с существенно нестационарными параметрами, меняющимися неконтролируемым образом в ограниченных пределах и перемен.ным временем запаздывания в каналах управления.
Предполагается, что динамика объекта управления описывается уравнением
tn-i1
+ а,(t)y
a«(f); - - c:(t),
де a;(t).- переменные параметры объекта, меняющиеся в известных предедах а a;(t) ё .at, i 1,..., , п;
а- и а -.известные константы; (t) - переменное запаздьгоание по времени в канале.уп- : равления, удовлетворяющее условию О ё & (t) TO где cTj - известная кон стакта.
Задача управления состоит в свеении к нулю ошибки регулирования
x(t) y(t) - y(t)
(далее остается y(t) const 0) при любом начальном состоянии и при обеспечении условий малой зависимости свойств управляемых процессов в замкнутой системе от параметров объекта управления и величины запаздывания в канале регулирования.
Цель изобретения - обеспечение
возможности регулирования объектами с запаздыванием, повышение помехо - устойчивости, грубости к реализации элементов и надежности системы управления.
На чертеже представлена системы автоматического управления, реализующая предлагаемый ниже подход для объектов с запаздьшанием.
Бинарная система включает объект
1 управления, блок 2 сравнения, за- датчик 3, дифференциаторы 4,,42..., соответствующих порядков, первые
модульные элементы 54, 5
г
п
первый сумматор 6, первый усилитель 7, вторые усилители 8,, 8 ... 8,, второй сумматор 9, первый релейный элемент 10, третий сумматор I1, второй релейный элемент 12,, третий усилитель 13, первьй интегратор 14, первый умножитель 15, второй модульный элемент 1б, четвертый сумматор 17, третий релейный элемент 18, второй умножитель 19, четвертый усили,тель 20, источник 21 постоянного напряжения, пятый усилитель 22, пятый сумматор 23, третий умножитель 24, второй интегратор 25, шестой усили- тель 26, седьмой усилитель 27, шестой сумматор 28,
Предлагаемое изобретение получено в рамках следзпор его подхода, В систему управления введены элементы, обес пе ивающие выполнение неравенства
Ie(t)l Ч (t) при t t,
где e(t) с.х,(t) + ,., +
+ Cn., х., (t) + Xp(t); (t) J(t)2(t);
12 ) 0 ° °
(t)l -g(t)), R d 0; tg - начальный момент времени
В рамках рассматриваемой структурной схемы должны быть выполнены сле- дзпощие условия на коэффшдаенты усиления блоков 7,27,13:
.(| - с:)с„;
(1 О(1 (o-J)V ) Л; oi 52o/(l - CO-CJ,
где рд max |a,(t)| ;
max I С;.( -a; (t)l( ;
1-я.2.1,
t c n max |c;| ;
«,... n-l
Q d + (PM + e о)л ;
()() .
Константы c и S j, определяются no известной методике таким образом, что . для переходной матрицы Р (t ,t ) сие- темы дифференциальных уравнений
Xj х,-, , i 1,2,,,п-2
и-/
, П-. - Z1 справедлива оценка ||Ф (t, t )|1
) для всех t t з tp причем d о R; с,,С2,,..,Сп., , R, 2(j , d - параметры алгоритма, вы
бираемые на основании требований, предъявляемых к системе.
При вьтолнении указанных соотношений для К,, К°, oi рассматриваемая
система управления обеспечивает следующую оценку на x(t):
Z:lx;(t)l м|:| x;(tje
М const О,
-d(t-i«,
0
5
0
5
Q
0
5
а,следовательно, и решение поставленной задачи управления.
Бинарная система работает следующим образом.
Сигнал y(t) с выхода задатчика 3 сравнивается с сигналом y(t) с выхода объекта 1 управления в блоке 2 сравнения. Полученный сигнал ошибки x(t) поступает непосредственно на вход, второго усилителя 8, и на вход первого модульного элемента 5, , а на входы вторых усилителей 8,8,,,,, 8 и первых модульных элементов 5,5,,,,,
5 п поступает через дифференциаторы соответствуюш 1х порядков 4,
4 , о,, ,,,Сигналы с выходов первых модульных элементов 5 , ,5,.. ,5 подаются на входы первого сумматора
б,Сигналы с выходов вторых усилителей В,, Bj,, ,,,, 8 подаются на входы второго сумматора 9, полученная на выходе второго сумматора 9 линейная комбинация сигнала ошибки и (n-l)-и ее производной являются ошибкой (t) контура координатно-параметрической обратной связи; она подается на вход первого релейного элемента 10, выходной сигнал которого последовательно проходит третий сумматор 11, второй релейный элемент 12, третий усилитель 13 и первьй интегратор 14, Сигнал, полз ченньй на выходе первого интегратора 14, подается на-вход первого умножителя 15 и второй вход третьего сумматора 11, Выходной сигнал второго сумматора 9 преобразуется вторым релейным элементом 16 и подается на вход четвертого сумматора 17, ас его выхода - через третий релейный элемент 18 поступает на вход второго умножителя 19, На второй вход второго умножителя 19 подается выходной сигнал четвертого усилителя 20, входным сигналом для которого служит вырабатываемый блоком 21 сигнал, величина которого равна, единице. Выходной сигнал блока 21 также подается через пятый усилитель 22 на вход пятого сумматора 23, на второй вход которого под ается выходной сигнал второго умножителя 19, Выходной сигнал пятого
:сумматора 23 подается на вход третье
51
его умножителя 24, выход которого соединен с входом второго интегратора 25. Выходной сигнал второго интегратора 25 подается на второй вход третьего умножителя 24, на вход шестого усилителя 26 и на вход седьмого усилителя 27. Выходной сигнал шестог усилителя 26 подается на второй вход четвертого сумматора 17. Выход седь- мого усилителя 27 подключен к входу шестого сумматора 28, на второй вход которого подается выходной сигнал первого cjTMMaTopa 6, пропущенный через первьш усилитель 7. Выходной сигнал шестого сумматора 28-служит вторым входным сигналом для первого умножителя 15, на выходе которого вырабатывается сигнал управления u(t), подаваемый на объект 1.
В предла1гаемой системе контур координатной обратной связи образова блоком 2 ..сравнения, дифференциаторами 4,, 4,..., 4„., , первыми модульными элементами 55,5,,,...,5,, первым сумматором 6, первым усилителем 7, шестым сумматором 28, первым умножителем 15, вторыми усилителями 8, ,8 ,... ,8j, вторым сумматором 9, вторым модульным элементом 16, четвертым сумматором 17, третьим релей- HbiM элементом. 18, вторым умножителем 19, источником 21 постоянного напря
женин , , четвертым 20 и пятым 22 усилителями, пятым сумматором 23, третьим умножителем 24, вторым интегратором 25, шестым 26 и седьмым 27 усилителями.
Контур координатно-параметрическо обратной связи образован первым релейным элементом 10, третьим сумматором 11, вторым релейным элементом 12, третьим усилителем 13 и первым интегратором 24.
Формула изобретения
Бинарная система управления объектами с запаздыванием, содержащая последовательно соединенные первый умножитель, объект управления и блок сравнения, второй вход которого со-
единен с выходом задатчика, а выход - с входами дифференциаторов, выходы которых и выход блока сравнения подключены через соответствующие первые модульные элементы к входам первого сзлиматора, а через соответствушщче
5 0
5
0
5
0
5
0
вторые усилители - к входам второго сз иматора, выход которого подключен к входу первого релейного элемента, выход которого через последовательно соединенные третий сумматор, второй релейный элемент и третий усилитель подключен к второму входу третьего сумматора и к входу первого умножителя, отличающаяся тем, что, с целью обеспечения возможности регулирования объектами с запаздыванием, повышения помехоустойчивости, грубости к реализации элементов и надежности системы управления, она содержит второй модульный элемент, вход которого подключен к выходу второго сумматора, а выход - к входу четвертого сумматора, выход которого через третий релейный элемент подключен к входу второго умножителя, второй вход которого соединен с выходом четвертого усилителя, входом подключенного к выходу источника постоянного напряжения, а выход второго умножителя соединен с входом пятого сумматора, второй вход -которого соединен с выходом пятого усилителя, входом подключенного к выходу источника ПОСТОЯННОГО напряжения, а выход пятого сз мматора подключен к входу третьего умножителя, выход которого подключен к входу второго интегратора, выход которого соединен с вторым входом третьего умножителя, а через шестой усилитель - с вторым входом четвертого сумматора, выход второго интегратора соединен с входом седьмого усилителя, выход которого подключен к входу шестого сумматора, вторым входом присоединенного к выходу первого усилителя, входом подключенного к выходу первого сумматора, а: выход шестого сумматора соединен с вторым входом первого умножителя.
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
