Изобретение относится к технике автоматического управления и регулирования и предназначено для автоматического управления вынужденным движением линейных многостадийных динамических объектов, параметры которых в пределах стадии меняются произвольно неконтролируемым образом в любых ограниченных пределах.
Изобретение ориентировано на многостадийные объекты, динамика которых описывается уравнением
-УФ
Yn(t) + an(t)(t) + ... + ai(t) Y(t) - U(YjS((1)
где Yj - задающее воздействие на j-й стахД О СЛ 00
О
ю
дии, причем
;-Yi(t)c,.
Y2S(t) C2,
ПРИ to t Atl,
при tii t t2,
(2)
L Yk (t) Ckпри tK i t tk При этом d, C2,....Ck - известные константы, в моменты времени, соответствующие переходу с одной стадии на другую, ti, t2,...tk заранее не известны; ai(t) - неизмеряемые
переменные параметры с изиест- ными диапазонами изменение
аГ-Sra.M- ai 1. i -v; 1,п(3) где аг - известные константы.
Цель управления спстснл и обеспечении для каждой стадии равенет оа V(t) Yf (t), т.е. в сведении к нулю ошибки регулирования, эолэвзе пм г.ортчгмлечием X(tj Vj (t) - Y(t)
ччальных условиях в си- : in iii-i/iOM зависимости .: процессов X(t) в замк- . .;м(:гроо ai(r) (i --- 1,n)
ПРИ ПрО ;ЗРГ /II
стеме. и оОс;.-.
СВОЙСТв У фЛВ-1
нутой CHCi i-.i ie исходного ес ла
НэИиО С . . .ч , к чрР;,Л21 ЭенОЙ ПО
технический i . . ,г.ь.ти яеляечг.я омнаг-нзя систем и г,;- r,-j:,- -t оордипппюй, КООр- -р.,..;: ч-ГгиЙ :i n.H i. iMC fРИЧвской сг,м,ягч1 содержащая последов. i; :ы; - ;,,...; - ниио первый сумматор, -. v и in о/и-.. ;(;ьо1- г управления и О/К ..|. г,1-|рчич. -торой которого
ПОДКУЮ;;;:::,.. :; ЯЫ/ . Ду ЗЗДа I 4i;i;G. 9 ЕЫХОД
соединен i s-.;гнл-: ди Ьферонцпа :оров, (Юдкл. -. :.- :i iri-|i.in и бтока сравнения :-г;оз соо вогстиующие первые усилители У. ы:орого с,ммагора, а через соогв :: ел ьующпе модульные элемйн- ты, пооле/ч.н.-, соединенные с соотOeTC f Г.уЮШ ,-,,. ; .jpljitviH уС ЛИ7, 7ЯМИ. К
иходам пе(-зог. с-/м.1лтора, BL,IXOA второго 1 ,; fiXT AO - рсл-ейкого ;к...ценного к входу IB, ьыход которою соесумматор :.. v : эло неп:, п1л... инерц1. onnoi i.1 ф... 1.
.чинен с вторым ь -он ;г., первого углножителя. Кроме того . --.я с.и.тема управления содерх- л т pi. (ХОД : --1Н : ДУЛЬН. , - ..; греть.:--; -,
ЯС;:. С ij К. ..: ,
пеоч -.- и Е-Х,:. ;,,,G;i:-:.:o ,:,-. роги Су. : Т:.;:г . Ht-j, r i.iii о.-- Фунм.--J- j/..-.;.; 1цая в л г..-;
Д И Й И :.. .:: i i г О ь j-pciL.Hf;. :: ; : : : ;
Li,e;;b:c MJ- Л ч
И И О ф ИК:Д - -.In.)
гь /Li ni;гели, подключенные ;:.-,,,.. ; сое iieir. i ьующих мо- , к-;:-.ч:-.;-, а вмл.одаги.: - к входам
плор:.. выход i- orcpui t сседи-, с.. 1-голого -/;. 1но;| итйля.
i гОТГ
-. ссэдпчен с, выходом и-.. ;-ч - (. входом втоi,- i-l-.v H ; I lCiCMb ЯПЛЯеТСЯ L Г р-Д i I ч . 00 Ь , СОС ГОЯ- .. VnUc,, и ft Hi-1 Я N-.ЧОГОСТЭ- . : i U1 . С П Ио jl Udt; М Ы М И
. яг. i расшире- х :юз;..носгей системы за с.че vпраI;льн обьектами с ;ю г темечи кусочно-постоянным .ч с нек ьестной длительностью кусо-I io-иоотоянны;: интервалов.
Поел. ;: ; цепь достигается тем, что г си;: г. г.- . л;;р кскцую последовательно еопдинс-1 .- гн ps; v: cy.v., первый ум- нол-j-i r« :t, /xV1. п,-г1влс1 1-,.ч и блок сравне- н-i. i. вы..0.0. к гэсого соединен с входами .-., -1:п;оро.- группы, которых и выход блока сравнения подключены через соответствующие усилители первой группы к входам второго сумматора и через соответствующие модульные элементы
группы к входам соответствующих усилителей второй и третьей групп , выходы которых подключены к входам первого и третьего сумматоров соответственно, выход второго сумматора соединен с входом релейного элемента, подключенного выходом к входу инерционного фильтра, выход которого соединен с вторым входом первого ум- ножителя и с первым входом второго умножителя, второй вход которого подключен к выходу третьего сумматора, а выход соединен с соответствующим входом второго сумматора, введены элемент задержки, последовательно соединенные пороговый элемент сравнения, генератор импульсов,
первый счетчик, дешифратор, блок элементов И, элемент ИЛИ, второй счетчик, второй дешифратор и блок задатчиков контура, соединенный вьГходом с суммирующим входом блока сравнения, выход которого
подключен к сигнальному входу порогового элемента сравнения, соединенного выходом со своим входом блокировки, выход элемента ИЛИ соединен с входом блокировки генератора импульсов, входом обнуления первого счетчика и через элемент задержки с входом разблокировки порогового элемента сравнения, группа выходов второго дешифратора соединена с другим входом блока элементов И.
На фиг.1 представлена структурная схема замкнутой системы управления; на фиг. 2 - предложенная система управления.
Система содержит (фиг.1) объект 1 управления, блок задатчиков 2 с выходным сигналом YjS(t) aj, j 1,k, регулятор 3 контура координатной обратной связи (КОС). формирующий сигнал управления U(t), блок
4 обнаружения границ стадий, формирующий логический сигнал j и образующий с блоком задатчиков 2 контур координатно- структурной обратной связи (КСОС), задатчик 5 контура координатно-параметрической
обратной связи (КПОС) с выходным сигналом Xs(t), регулятор б контура КПОС, формирующий сигнал /ф), регулятор 7 контура параметрической обратной связи (ПОС), формирующий сигнал -б (t). определяющий
оператор динамического задатчика 5. При использозании КОС. КПОС и ПОС получается схема с элементами 1-3, 5-7. В таких системах не представляется возможным управлять классом объекта с изменяемым во
времени кусочно-постоянным заданием. Кроме того, неизвестная длительность кусочно-постоянных интервалов не позволяет применить для решения поставленной задачи программно перестраиваемый блок за- датчиков. В связи с этим в систему вводится контур координатно-структурной обратной связи (КСОС), предназначенный для перестройки блока задатчиков в зависимости от стадии объекта. Идентификация стадии обь- екта осуществляется блоком 4 обнаружения границ стадий путем анализа измеряемых фазовых координат объекта и формировании логического сигнала j для перестройки блока задатчиков. В результате введения в систему КСОС получается схема, представленная на фиг.1.
Система (фиг.2) содержит объект 1 управления, блок 2 задатчиков контура КОС регулирующий сигнал Yj (t), блок 3 сравне- ния, дифференциаторы 4, первые усилители 5, второй сумматор 6, модульные элементы 7, вторые и третьи усилители 8 и 9, первый и третий сумматоры 10 и 11, релейный элемент 12, инерционный фильтр 13,первый и второй умножители 14 и 15, пороговый элемент 16 сравнения, генератор импульсов 17, первый счетчик 18. первый дешифратор 19. блок 20 элементов И, элемент ИЛИ 21. элемент 22 задержки, второй счетчик 23. второй дешифратор 24.
Работу предлагаемой бинарной системы рассмотрим сначала для динамической части системы (блоки 1,3.- 15), а затем логической части (блоки 2, 16-24).
Динамическая часть бинарной системы функционирует следующим образом. Сигнал Yjs(t) с блока 2 задатчиков сравнивается с сигналом с выхода объекта 1 управления в блоке 3 сравнения. Сигнал с выхода блока 3 сравнения X(t) Yjs(t) - Y(t) поступает непосредственно на вход первого модульного элемента 7i, а на входы остальных модульных элементов 72, 7з,....7п через дифференциаторы 4i, 42,...,4п-1 соответствующих порядков, сигнал с выхода блока 3 сравнения и сигнал с выходов дифференциаторов 4i, 42,...,4п-1 через соответствующие первые усилители 5i. 52,..,,5n подаются на второй сумматор 6. Полученная на выходе второго сумматора линейная комбинация сигнала ошибки X(t), его(п-1)-й производной и сигнала с выхода второго умножителя 15 является ошибкой координатно-параметрического контура o(t), она подается на вход релейно- го элемента 12, а сигнал с выхода релейного элемента 12 - на вход инерционного фильтра 13, выход которого /ф) является непрерывным гладким сигналом, колебания
которого обусповлены изменением параметров объекта, сигнал поступает на второй вход первого умножителя 14 и на первый вход второго умножителя 15. Выходные сигналы модульных элементов 7i. 72,....7n преобразуются на соответствующих вторых 8i. 82,....8п и третьих 9i, 92,...,9n усилителях, выходы которых суммируются соответственно на первом 10 и третьем 11 сумматорах,с выхода третьего сумматора 11 сигнал поступает на второй вход второго умножителя 15, в результате линейная комбинация координаты ошибки X(t) и ее производных умножается на сигнал /ф) и результат умножения подается на вход второго сумматора 6, поя ученная на выходе первого сумматора 10 линейная комбинация ошибки и ее производных подается на первый вход умножителя 14, на второй вход которого подан сигнал u(t), в результате умножения образуется сигнал управления U(t), который подается на вход объекта 1 управления.
Логическая часть бинарной системы функционирует следующим образом. В исходном состоянии на первом выходе второго дешифратора 24 присутствует единичный потенциал, на остальных выходах - нулевые потенциалы, а на выходе блока 2 задатчиков - задающее воздействие Yi (t). соответствующее первой стадии объекта 1 управления. Как уже отмечалось, сигнал X(t) YjS(t) - Y(t) с выхода блока 3 сравнения поступает на вход порогового элемента 16 сравнения, где он сравнивается с нулем. В случае, если X(t) 0, на выходе порогового элемента 16 сравнения появляется единичный сигнал, который поступает на вход блокировки элемента 16 сравнения и на вход запуска генератора импульсов 17. При этом элемент 16 сравнения прекращает свою работу, а с выхода генератора 17 импульсы начинают поступать на вход первого счетчика 18. код с выхода которого поступает на вход первого дешифратора 19. В случае поступления с генератора 17 определенного количества гм импульсов, соответствующего продолжительности первой стадии, на первом выходе дешифратора 19 появляется сигнал, который поступает на первый вход первого элемента блока 20 элементов И, на втором входе которого присутствует 1 с первого выхода второго дешифратора 24. При этом с первого выхода блока 20 элементов И единичный сигнал поступает через элемент ИЛИ 21 на вход обнуления счетчика 18, на вход блокировки генератора 17, на вход второго счетчика 23 и на вход элемента 22 задержки. Генератор 17 прекращает свою работу, счетчик 18 обнуляется, счетчик 23
срабатывает по переднему фронту и его содержимое увеличивается на единицу. Код с выхода счетчика 23 поступает на вход дешифратора 24, на втором выходе которого появляется единичный потенциал, который поступает не второй вход второго элемента блока 20 элементов И и на второй вход блока 2 задатчиков. В соответствии с входным сигналом блок 2 эадатчиков изменяется задающее воздействие с Yt (t) на Y2 (t), которое поступает на вход блока 3 сравнения. При этом единичный потенциал через элемент 22 задержки поступает на вход разблокировки элемента 16 сравнения, который с этого момента возобновляет свою работу. Таким образом осуществляется переход на вторую стадию объекта 1 управления. В дальнейшем работа системы происходит аналогично.
Технико-экономический эффект предлагаемой бинарной системы с КОС, КПОС, ПОС и КСОС заключается в возможности управления объектами с изменяемым во времени кусочно-постоянным заданием с неизвестной длительностью кусочно-постоянных интервалов, это обеспечивает адаптацию бинарной системы к действию неконтролируемых координатных и параметрических возмущений и позволяет сократить длительность каждой стадии технологического процесса, следовательно, и длительность всего технологического процесса а целом. Кроме того, формирование задающего воздействия в зависимости от стадии технологического процесса позволяет повысить качество целевой продукции.
Формула изобретения Бинарная система управления, содержащая последовательно соединенные первый сумматор, первый умножитель, объект управления и блок сравнения, выход которого соединен с входами дифференциаторов группы, выходы которых и выход блока сравнения подключены через соответствующие усилители первой группы к входам второго сумматора и через соответствующие модульные элементы группы к входам соответствующих усилителей второй и третьей групп, выходы которых подключены к входам первого и третьего сумматоров соответственно, выход второго сумматора соединен с входом релейного элемента, подключенного выходами к входу инерционного фильтра, выход которого соединен с вторым входом первого умножителя и с первым входом второго умножителя, второй вход которого подключен к выходу третьего сумматора, а выход соединен с соответствующим входом второго сумматора, отличающаяся тем, что, с целью расширения функциональных возможностей системы за счет управления объектами с изменяемым во времени кусочно-постоянным заданием с неизвестной длительностью кусочно-постоянных интервалов, она дополнительно содержит
элемент задержки, последовательно соединенные пороговый элемент сравнения, генератор импульсов, первый счетчик, дешифратор, блок элементов И, элемент ИЛИ, второй счетчик, второй дешифратор и
блок задатчиков контура, соединенный выходом с суммирующим входом блока сравнения, выход которого подключен к сигнальному входу порогового элемента сравнения, соединенного выходом со своим
входом блокировки, выход элемента ИЛИ соединен с входом блокировки генератора импульсов, входом обнуления первого счетчика и через элемент задержки с входом разблокировки порогового элемента сравнения, группа выходов второго дешифратора соединена с другим входом блока элементов И.
Фаг(
ikw
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Адаптивная система управления | 1984 |
|
SU1257607A1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
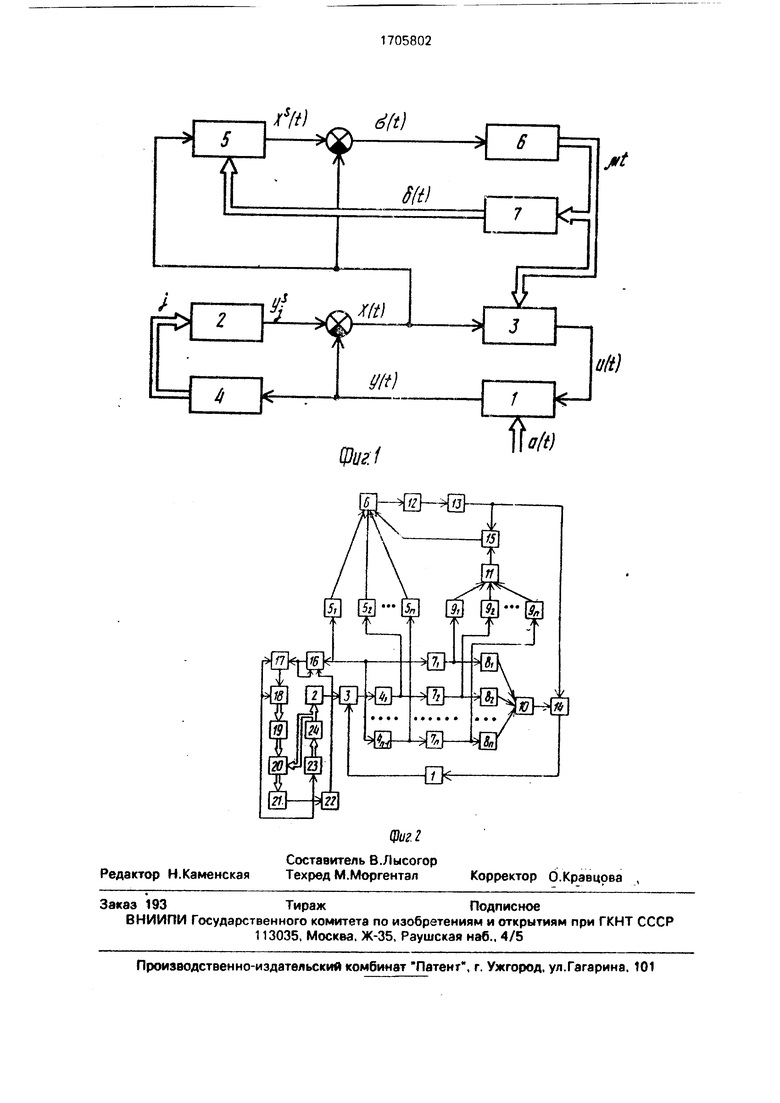
Изобретение относится к технике автоматического управления и регулирования и предназначено для автоматического управления вынужденным движением многостадийных динамических объектов, параметры которых в пределах стадии меняются произвольно неконтролируемым образом в любых ограниченных пределах. Целью изобретения является расширение функциональных возможностей системы за счет управления объектами с изменяемым во времени кусочно-постоянным заданием с неизвестной длительностью кусочно-постоянных интервалов. Система содержит объект 1 управления, блок 2 задатчиков, блек 3 сравнения, дифференциаторы 4, первые, вторые и третьи усилители 5, 8, 9, первый, второй и третий сумматоры 10, 6 и 11. модульные элементы 7, релейный элемент 12, инерционный фильтр 13, первый и второй умножители 14 и 15 пороговый элемент 16 сравнения, генератор импульсов 17, первый и второй счетчики 18 и 23, первый и второй дешифраторы 19 и 24, блок 20 элементов И, элемент ИЛИ 21. элемент 22 задержки. Идентификация стадии объекта осуществляется пороговым элементом сравнения 16. счетчиком 23, дешифратором 24 путем анализа измеряемых фазовых координат объекта. При этом дешифратор 24 формирует логический сигнал для перестройки блока 2 задатчиков. 2 ил. ё
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Авторское свидетельство СССР № 1146625,кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
