Изобретение относится к области авто- м|атического управления и предназначено для решения задачи оптимальной стабилизации динамической системы в условиях не- отределенности.
Рассмотрим объект управления следу с щего вида
уп(т)+ап(т)(2)+...+а1(г)у(т.)ил to (1) параметры которого ai(t), (,n) известны с точностью до соотношений:
a ai(t) ai+, i 1,n
траведливых для всех т to, ai (.n)- известные константы. Запишем уравнение
1стемы регулирования относительно расэгласования
x(t)y(t)-ys(t) rbe ys(t) - задающее воздействие при t t0, тргда из (1) следует уравнение
,.П/., ..П-1/. . .. I I
xn(t)+an(t)xn- (t)+... лЫбо в матричной форме x(t) A(t)x(t)+ bU. t to.
где х
W
e (Rn, A e
n-K.
(K
ь e
(2)
(3) R n,
A
СП
с
Задача управления (З) состоит в построении стабилизирующего управления (t,x), обеспечивающего на траекториях замкнутой системы минимум функционала качества
1 (r)Ri(r)x(g+xT(r)R2x(r)ldt,(4)
где . |R nxn, ,2 - положительно определенные для всех t t0 функции.
Прототипом предлагаемого технического решения является система управления с координатно-параметрической и параметрической обратными связями, содержащая последовательно соединенные первый сумсо со XI
Ю (Л
ел
матор, умножитель, первый блок сравнения, объект управления и второй блок сравнения, второй вход которого соединен с выходом задатчика, а выход - со входами дифференциаторов, выходы которых и блоки сравнения через соответствующие первые усилители соединены со входами первого сумматора и через соответствующие вторые усилители - со входами второго сумматора, выход которого подключен через релейный элемент ко входу инерционного фильтра, сигнал с которого поступает на второй вход умножителя,
Описанная система в рассматриваемой, постановке гарантирует стабилизацию объекта управления (3) в нуле, однако обеспечивает только заданную степень устойчивости.
С целью обеспечения оптимальности замкнутой системы регулирования в систему, содержащую последовательно соединенные первый умножитель, объект управления, первый блок сравнения, второй вход которого соединен с выходом задатчика, а выход - со входами дифференциаторов, выходы которых и выход первого блока сравнения через первые модульные элементы и соответствующие первые усилители соединены со входами первого сумматора, а также через соответствующие вторые усилители со входами второго сумматора, введены эталонная модель, выход которой соединен со входом второго блока сравнения, вторым входом которого является выход второго сумматора, а также через последовательно соединенные третий модульный элемент и четвертый усилитель - со входом первого сумматора, второй модульный элемент, подключенный своим входом к выходу второго блока сравнения, а выходом - ко входу второго умножителя, после- довательно соединенного с третьим сумматором, второй вход которого подключен к выходу второго блока сравнения, а выход - через последовательно соединенные релейный элемент и третий усилитель - ко входу инерционного фильтра, выход которого соединен со вторыми входами первого и второго умножителя.
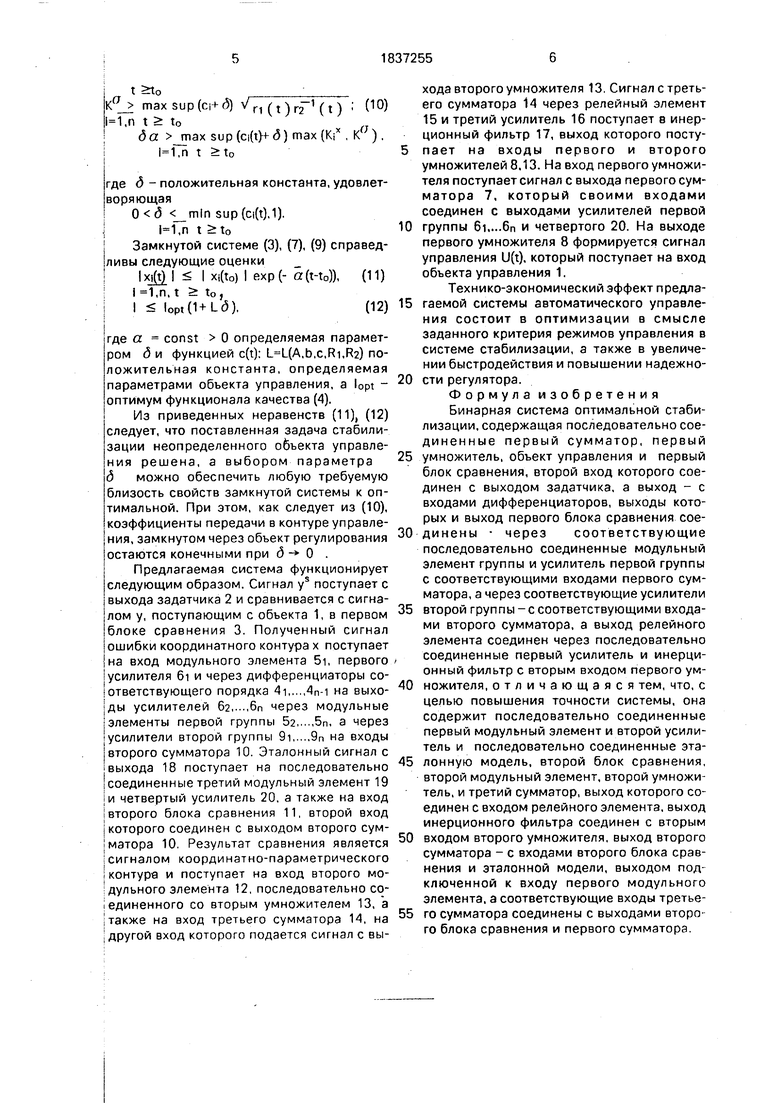
На чертеже представлена схема системы автоматического управления, решающая поставленную задачу и являющаяся предметом настоящего изобретения. На фиг. 1 приняты следующие обозначения: 1 - объект управления, 2 - задатчик, 3 - первый блок сравнения. 4i4п-1 - дифференциаторы соответствующего порядка, 5i5п - модульные элементы первой группы, 6i6n
усилители первой группы, 7 - первый сумматор, 8 -- первый умножитель, 9i,...9n - блоки сравнения второй группы, 10 - второй сумматор, 11 - второй блок сравнения, 12 - второй модульный элемент, 13 - второй умножитель, 14 - третий сумматор, 15 -релейный элемент, 16 - третий усилитель, 17 - интегратор, 18 - функциональный блок - эталонная модель, 19 - третий модульный элемент, 20 - четвертый усилитель.
Оптимальность замкнутой системы
обеспечивается за счет введения эталонного сигнала ам(т), формируемого блоком 18 для агрегата управляемых процессов а стх, где с: t0, ) - fR n, и введение рас- согласования о а -а м в качестве ошибки координатно-параметрического контура.
Предлагается следующая процедур
формирования агрегата а и эталонного
сигнала а м. Решение оптимизационной
задачи (3), (4) определяет оптимальную функцию управления в следующем виде.
Uopt -KT(t)x- Ј )xi.(5)
где К: to, оо ) - fRn - функция, определяю- щаяся из соответствующего уравнения Рик- кати.
Управление (5) является оптимальным также и в силу следующего функционала:
lcr Zn 2W2s(r)+ a 2(t)r2(r )dr, (6)
5
0
где n: to, °° ) -. fR+ , ,2. При этом функции c(t), n(t), ,2 должны удовлетворять следующему условию
cT(t)-cT(t)E-bkT+ri(t)(t)(7)
ГО 1 0...0
где Е- О О 1 ... О L 0 0-I
I - единичная матрица. Вследствие управляемости исходной системы (1) уравнение (7) всегда имеет ограниченное решение.
Тогда эталонная модель 18 реализует следующее соотношение
QRr
aM(t) Vr2-iri aM(t), . о-м (to ) с1 (ь ) х (to).
(8)
Для реализации оптимального управления (5) служит предлагаемый здесь регулятор, который может быть представлен в следующем виде:
U M.fiK,x|xil
I - I
+ К Ом I ),
(9)
/i -asgn(7+ /г d (llxll + |г7м| ), где коэффициенты усиления усилителей
первой группы 6i6n-KixКпх четвертого
усилителя 20 - К и третьего усилителя 16Х выбираются из соотношения Kix sup(ci+ d)ai(t);
t to
I LlO
K° maxsup() /7T( t) rT1 (t ) (1°)
,n t to„
- -u
1 i TO
(5 a jyiax sup (ci(t)+ 5) max (Kjx , K ,n t t0
где 3 - положительная константа, удовлетворяющая
mln sup(ci(t),1).
,n t t010
Замкнутой системе (З), (7), (9) справедливы следующие оценки
I xi(to) I exp(- a(t-to)), (11)
i 1,П, t to,
I Iopt(1+Ld).(12) 15
|где a const 0 определяемая параметром д и функцией c(t): (A,b,c,Ri,R2) положительная константа, определяемая параметрами объекта управления, a I0pt оптимум функционала качества (4).
Из приведенных неравенств (11), (12) следует, что поставленная задача стабилизации неопределенного объекта управления решена, а выбором параметра д можно обеспечить любую требуемую близость свойств замкнутой системы к оптимальной. При этом, как следует из (10), коэффициенты передачи в контуре управле- |ния, замкнутом через объект регулирования остаются конечными при д - 0 .
Предлагаемая система функционирует следующим образом. Сигнал у5 поступает с выхода задатчика 2 и сравнивается с сигналом у, поступающим с объекта 1, в первом блоке сравнения 3. Полученный сигнал ошибки координатного контура х поступает на вход модульного элемента 5i, первого усилителя 6i и через дифференциаторы со|ответствующего порядка 4i4п-1 на выхо|ды усилителей 626П через модульные
элементы первой группы 525П, а через
усилители второй группы 9i9П на входы
|второго сумматора 10. Эталонный сигнал с выхода 18 поступает на последовательно соединенные третий модульный элемент 19 |и четвертый усилитель 20, а также на вход iвторого блока сравнения 11, второй вход j которого соединен с выходом второго сум- |матора 10. Результат сравнения является сигналом координатно-параметрического I контура и поступает на вход второго модульного элемента 12, последовательно со- единенного со вторым умножителем 13, а | также на вход третьего сумматора 14, на другой вход которого подается сигнал с вы0
5
0
5
0
5
0
5
0
5
хода второго умножителя 13. Сигнал с третьего сумматора 14 через релейный элемент 15 и третий усилитель 16 поступает в инерционный фильтр 17, выход которого поступает на входы первого и второго умножителей 8.13. На вход первого умножителя поступает сигнал с выхода первого сум- матора 7, который своими входами соединен с выходами усилителей первой группы 6i,...6n и четвертого 20. На выходе первого умножителя 8 формируется сигнал управления U(t), который поступает на вход объекта управления 1.
Технико-экономический эффект предлагаемой системы автоматического управления состоит в оптимизации в смысле заданного критерия режимов управления в системе стабилизации, а также в увеличении быстродействия и повышении надежности регулятора.
Формула изобретения Бинарная система оптимальной стабилизации, содержащая последовательно сое- диненные первый сумматор, первый умножитель, объект управления и первый блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов, выходы которых и выход первого блока сравнения сое- динены через соответствующие последовательно соединенные модульный элемент группы и усилитель первой группы с соответствующими входами первого сумматора, а через соответствующие усилители второй группы - с соответствующими входами второго сумматора, а выход релейного элемента соединен через последовательно соединенные первый усилитель и инерционный фильтр с вторым входом первого умножителя, отличающаяся тем, что, с целью повышения точности системы, она содержит последовательно соединенные первый модульный элемент и второй усилитель и последовательно соединенные эталонную модель, второй блок сравнения, второй модульный элемент, второй умножитель, и третий сумматор, выход которого соединен с входом релейного элемента, выход инерционного фильтра соединен с вторым входом второго умножителя, выход второго сумматора - с входами второго блока сравнения и эталонной модели, выходом подключенной к входу первого модульного элемента, а соответствующие входы третьего сумматора соединены с выходами второго блока сравнения и первого сумматора.
d
J
17
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| Бинарная система управления объектами с запаздыванием | 1986 |
|
SU1383294A1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Бинарная система управления | 1985 |
|
SU1303993A1 |
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Бинарная система управления нелинейными объектами | 1985 |
|
SU1305631A1 |
/
