Изобретение относится к машиностроению, конкретно к механизмам точного позиционирования выходных звеньев роботов, манипуляторов и других устройств.
Цель изобретения - улучшение эксплуатационных характеристик за счет снижения мошности привода, уменьшения потерь на трение между подвижными частями устройства и уменьшения износа рабочих поверхностей.
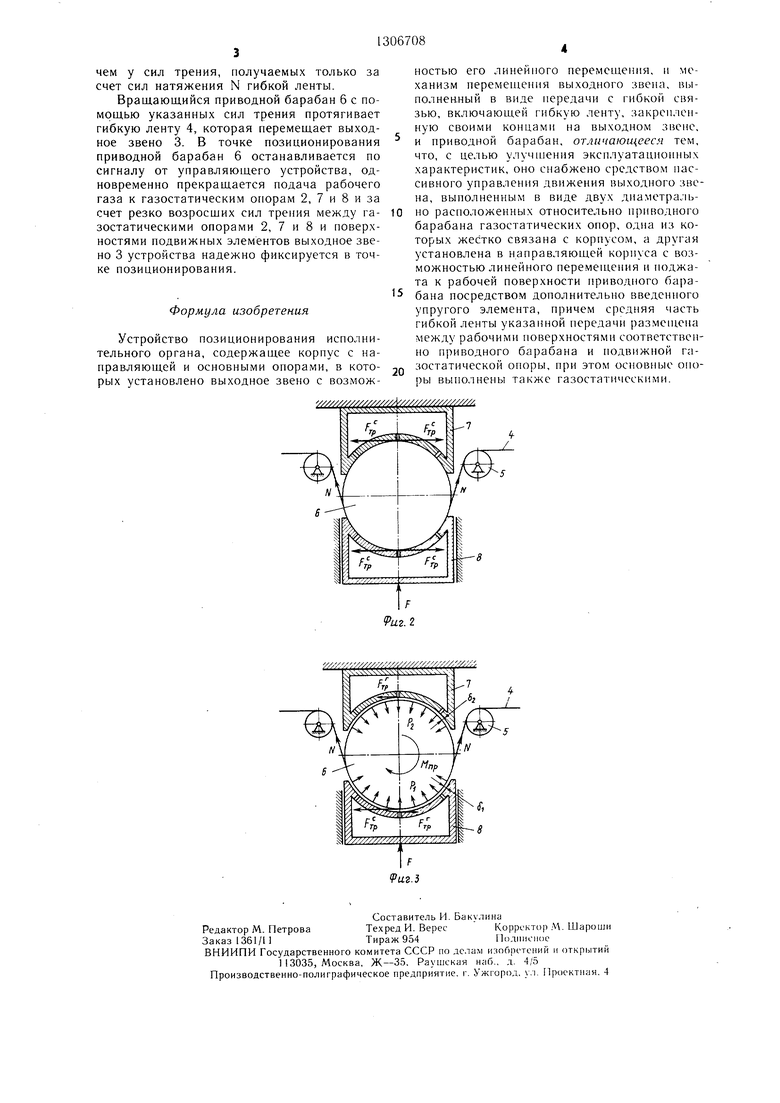
На фиг. 1 изображена схема устройства позиционирования исполнительного органа; на фиг. 2 - схема сил, действующих на приводной барабан и гибкую ленту в исходном заторможенном состоянии; на фиг. 3 - то же, в рабочем состоянии.
Устройство позиционирования исполнительного органа содержит неподвижный корпус 1, имеющий основные опоры 2 скольжения с газовой смазкой (газостатические), в которых установлено выходное звено 3 с возможностью линейного перемещения.
Механизм неремещения выходного звена 3 выполнен в виде передачи с гибкой связью, включающей гибкую ленту 4, концы которой закреплены на концах выходного звена, а ее средняя часть огибает пассивные ролики 5 и приводной барабан 6.
Средство пассивного управления движения выходного звена 3 выполнено в виде двух диаметрально расположенных относи- те;|ьно приводного барабана 6 газостатических опор 7 и 8, одна из которых (7) жестко закреплена в корпусе 1, а другая (8) установлена в направляющей 9 корпуса 1 с возможностью линейного перемещения в направлении, перпендикулярном оси приводного барабана 6, и поджата к рабочей поверхности приводного барабана 6 посредством дополнительно введенного упругого элемента 10, например пружины. Гибкая лента 4 закреплена на концах выходного звена 3 и натянутая силой предварительного натяжения уложена между рабочими поверхностями соответственно приводного барабана 6 и подвижной газостатической опоры 8 средства пассивного управления движения.
В исходном положении (при отсутствии в газостатических опорах 2, 7 и 8 рабочего газа под давлением) между поверхностями приводного барабана 6 и гибкой ленты 4, поверхностями гибкой ленты 4 и газостатической опоры 8, поверхностями газостатической опорь 7 и приводного барабана 6 действуют силы сухого трения Ftp, обусловленные силой поджатия F подвижной газостатической опоры 8 приводного барабана, силой предварительного натяжения N гибкой ленты 4 и коэффициентом сухого трения г|, т. е. (F,N,ii). Все эти характеристики выбраны таким образом, чтобы силы трения удерживали выходное звено 3 в заторможенном состоянии, т. е. выходное звено 3 должно оставаться неподвижным при воздействии случайных внешних сил.
Устройство работает следующим образом. Перед началом вращения приводного барабана 6 в полости газостатических опор 2, 7 и 8 подается под давлением рабочий
газ, который через капиллярные отверстия попадает в рабочий зазор соответственно между поверхностями газостатических опор 2 и выходного звена 3, газостатической части опоры 7 и рабочей поверхности приводного барабана 6, газостатической опоры 8 и
частью поверхности гибкой ленты 4, огибающей приводной барабан 6. Между перечисленными поверхностями создается пленка газа, находящегося при некотором повышенном давлении, исключающем непосредственный контакт этих поверхностей. Таким образом создается условие для работы газостатических опор, силы трения в которых во много раз меньше по сравнению с сухим трением. При этом между поверхностями приводного барабана 6 и огибающей его гибкой ленты 4 остается сухое трение, обеспечивающее такую силу трения (), величина которой обусловлена необходимостью преобразования вращательного движения приводного барабана 6 в поступательное движение выходного звена 3 без
проскальзывания гибкой ленты 4 и передачи выходному звену 3 требуемого усилия. Это достигается подбором величин силы предварительного натяжения N гибкой ленты 4, давления рабочего газа PI в зазоре между | азостатической . опорой 8 приводного барабана и поверхностью гибкой ленты 4 и, соответственно, силы F поджатия газостатической опоры 8 приводного барабана & к гибкой ленте 4. При этом должно соблюдаться условие
35
,
где Р| - давление рабочего газа в зазоре между гибкой лентой 4 и газостатической опорой 8 приводного барабана;
S - площадь проекции рабочей поверхности газостатической опоры 8 приводного барабана на горизонтальную плоскость;
F - сила поджатия газостатической опоры 8 приводного барабана. Давление рабочего газа Р в зазоре между газостатической опорой 7 и приводным барабаном б определяется величиной силы натяжения N гибкой ленты 4 и давлением Р|. При выполнении описанных условий устройство приходит в рабочее состояние, при котором силы трения, препятствующие перемещению выходного звена 3 относительно неподвижного корпуса 1, имеют крайне малые значения, а силы трения между приводным барабаном 6 и гибкой лен- той 4 остаются большими и достаточными для передачи движущего усилия от приводного устройства к выходному звену 3. ВеличинЕя полученных сил трения больше.
чем у сил трения, получаемых только за счет сил натяжения N гибкой ленты.
Вращающийся приводной барабан 6 с помощью указанных сил трения протягивает гибкую ленту 4, которая перемещает выходное звено 3. В точке позиционирования приводной барабан б останавливается по сигналу от управляющего устройства, одновременно прекращается подача рабочего газа к газостатическим опорам 2, 7 и 8 и за счет резко возросщих сил трения между газостатическими опорами 2, 7 и 8 и поверхностями подвижных элементов выходное звено 3 устройства надежно фиксируется в точке позиционирования.
Формула изобретения
Устройство позиционирования исполнительного органа, содержащее корпус с направляющей и основными опорами, в которых установлено выходное звено с возмож
ностью его линейпого перемещения, и механизм перемещения выходного звена, выполненный в виде передачи с гибкой связью, включающей гибкую ленту, закрепленную своими концами па выходном звене, и приводпой барабан, отличающееся тем, что, с целью улучшения эксплуатационных характеристик, оно снабжено средством пассивного управления движения выходного звена, выполненным в виде двух диаметрально расположенных относительно приводного барабана газостатических опор, одна из которых жестко связана с корпусом, а другая установлена в направляющей корпуса с возможностью линейпого перемепгеиия и поджата к рабочей поверхности приводпого барабана посредством дополнительно введенного упругого элемента, причем средняя часть гибкой ленты указанной передачи размещена между рабочими поверхностями соответственно приводпого барабана и нодвижной газостатической опоры, при этом основные опоры выполнены также газостатпчсскими.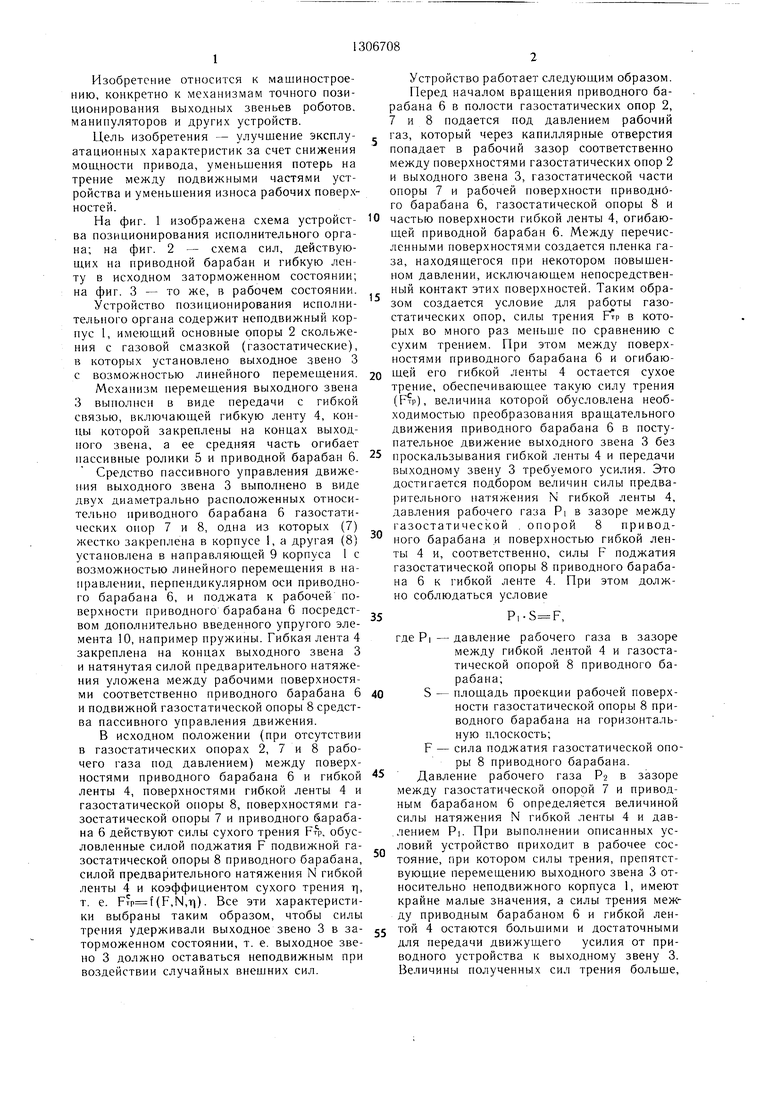
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ | 2014 |
|
RU2565807C2 |
| ПРОТАСКИВАЮЩЕЕ УСТРОЙСТВО СУЧКОРЕЗНОЙ МАШИНЫ | 1972 |
|
SU424710A1 |
| Крутонаклонный ленточный конвейер | 1984 |
|
SU1234296A1 |
| Крутонаклонный ленточный конвейер | 1983 |
|
SU1142372A1 |
| ПРИВОД ОДНОСТОРОННЕГО ДЕЙСТВИЯ | 1994 |
|
RU2075655C1 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2000 |
|
RU2184693C2 |
| Устройство для орбитальной обработки неповоротных стыков и торцов труб | 2018 |
|
RU2696984C1 |
| Бункер для слабосыпучих материалов | 1986 |
|
SU1400972A2 |
| ПРИВОДНАЯ СТАНЦИЯ ЛЕНТОЧНОГО КОНВЕЙЕРА | 1973 |
|
SU404950A1 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1998 |
|
RU2152342C1 |
Изобретение относится к машиностроению, конкретно к механизмам точного позиционирования выходных звеньев роботов, манипуляторов и других устройств. Целью изобретения является улучшение эксплуатационных характеристик. Устройство позиционирования исполнительного органа содержит неподвижный корпус 1, имеющий газостатические опоры 2, в которых установлено выходное звено 3 с возможностью линейного перемещения, механизм перемещения выходного звена 3, выполненный в виде гибкой ленты 4 и приводного барабана 6, а также средство пассивного управления движения выходного звена 3, выполненного в виде двух диаметрально расположенных относительно приводного барабана 6 газостатических опор 7 и 8. Газостатическая опора 7 жестко закреплена в корпусе 1, а газостатическая опора 8 установлена в направляющей 9 корпуса 1 с возможностью линейного перемещения и поджата к рабочей поверхности приводного барабана 6 посредством дополнительно введенного упругого элемента 10. 3 ил. i (Л 5 Ю со о о о СХ) 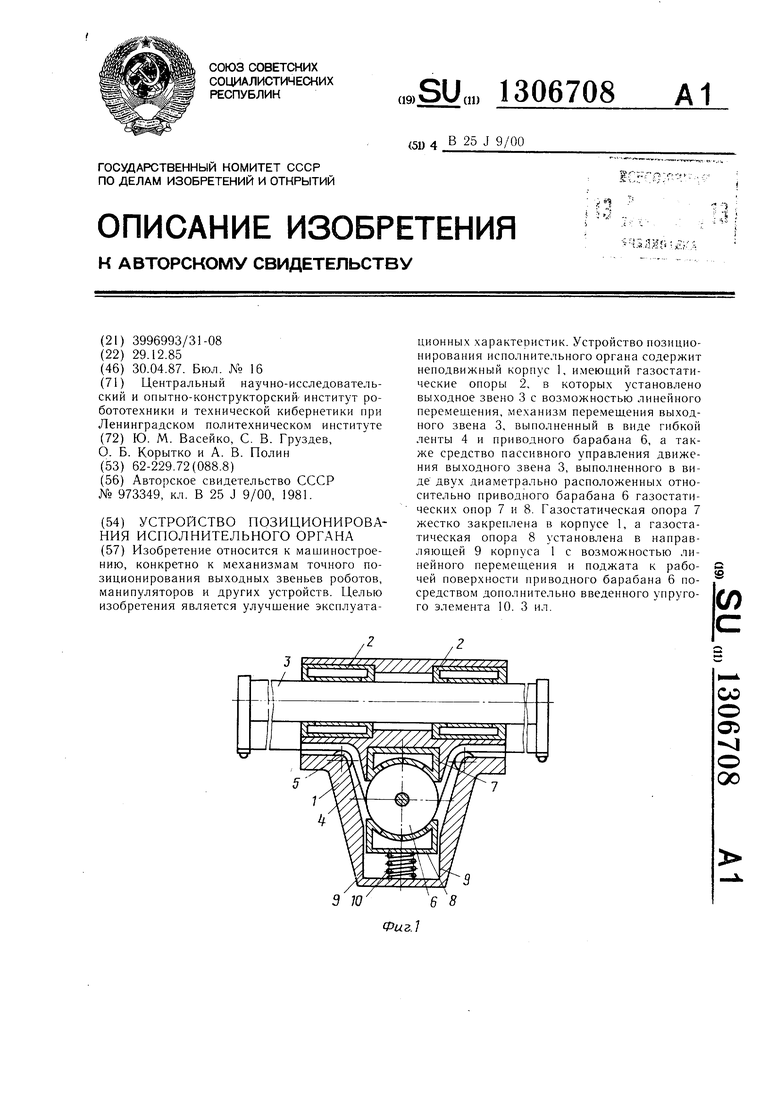
Составитель И. Бакулина
Редактор М. ПетроваТехред И. Верес Корректор .. Шарошм
Заказ 1361/11Тираж954Подписное
ВНИИПИ Государственного комитета СССР по делам нзобретеннн и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, i . Ужгород, ул. Проектная. 4
| Механизм позиционирования исполнительного органа робота | 1981 |
|
SU973349A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
