Изобретение относится к транспортной технике, и может быть использовано для по/иа.ержания постоянной скорости, например, при стендовых испытаниях транспортного средства.
Целью изобретения является повышение точности поддержания постоянной скорости транспортного средства.
На чертеже приведена блок-с.кема предлагаемого устройства.
Устройство для стабилизации скорости движения транспортного средства содержит задатчик 1 и датчик 2 скорости транспорт- : ного средства, выход последнего из которых : через формирователь 3 импульсов подключен : к одному из входов блока 4 совпадения, другой вход которого подключен к выходу управляемого генератора 5. Выход блока 4 через интегрирующий усилитель 6 связан с исполнительным механизмом 7 топливопо- даюн,1.его органа двигателя 8 транспортного средства. Датчик 9 нагрузочного момента механически связав с валом двигателя 8. Выход датчика 9 подключен к второму входу нелинейного преобразователя 10, первый вход которого объединен с одним из входов сумматора 11 и подключен к задат- чику 1 скорости, причем выход нелинейного преобразователя 10 подключен к другому входу сумматора 11, выход которого подключен к входу управляемого генератора 5.
Устройство работает следующим образом.
С помощью задатчика 1 скорости, выполненного в виде потенциометра, устанавливается требуемая скорость транспортного средства. Напряжение с выхода задатчика 1 скорости, пройдя через сумматор 1 1, поступает на вход управляемого генератора 5. В зависимости от величины напряжения на входе генератора 5 последний формирует импульсы с некоторым периодом следования. Эти импульсы поступают на один из входов блока .4 совпадения, на другой вход которого поступают импульсы с выхода формирователя 3 импульсов. Формирователь 3 может быть выполнен в виде мультивибратора. На выходе формирователя 3 вырабатывается положительный импульс в случае отсутствия импульса от датчика 2 скорости. При установившейся скорости движения транспортного средства частота импульсов, пропускаемых блоком 4 в усилитель 6, соответствует определенной величине тока, поступающего в исполнительный механизм 7, что, в свою очередь, определяет положение штока исполнительного механизма 7, соединенного с рычагом топливодозирующе- го орг ана двигателя 8.
С возрастанием внешней нагрузки на валу двигателя 8 при определенной цикловой подаче топлива обороты двигателя начнут снижаться, что приведет к снижению скорости. При этом число импульсов запуска, посту- паюпгих от датчика 2 скорости, уменьшится, что приведет к увеличению длительности выходного импульса формирователя 3 и пропуску блоком 4 в усилитель 6 большего числа импульсов от генератора 5. Кроме того, при возрастании внешней нагрузки на валу двигателя 8 практически мгновенно увеличится напряжение на выходе датчика 9 нагрузочного момента. Сигнал с выхода датчика 9, пройдя через нелинейный преобразователь 10, поступает на вход сумматора 11. Характеристика нелинейного преобразовате- ля 10 подбирается такой, чтобы для данного типа двигателя 8 скомпенсировать падение скорости вследствие увеличения нагрузки путем увеличения напряжения на входе генератора 5.
Увеличение сигнала на выходе датчика 9 и уменьшение числа импульсов на выходе датчика 2 приводят к пропуску блоком 4 большего количества импульсов. Величина среднего тока на выходе усилителя 6 возрастает, в результате чего шток испол- нительного механизма 7 переместится на большую величину, что обусловливает перемещение рычага топливодозирующего органа двигателя 8 в сторону увеличения цикловой подачи топлива. Увеличение подачи топлива приведет к росту числа оборотов вала двигателя 8 и возрастанию скорости движения транспортного средства до первоначальной установленной величины.
При снижении внешней нагрузки на двигатель 8 описанные процессы протекают аналогично в обратно.м направлении изменения рассматриваемых величин.
Функцию нелинейного преобразователя 0 можно определить из математической модели устройства.
Частоту /г на выходе генератора 5 можно определить по формуле
/Г Ч«+Мг-ф(4),
где дд - напряжение на выходе задатчика 1;
Мс - момент сопротивления на валу двигателя 8;
) цередаточная функция преобразователя 10.
Ф
Решая дифференциальное уравнение, опи- сывающее предлагаемое устройство, можно получить, что
w
(
где ъО - угловая скорость вращения вала
двигателя 8;
К -коэффициент пропорциональности
Mg-движущий момент двигателя 8, h - величина перемещения рычага топ- диводозирующего органа двигателя 8.
Поскольку величина м определяется величиной L iftj, а коэффициент зависит от диапазона частотной характеристики транспортного средства и, следовательно, от ш, то реализация данного нелинейного закона возможна с помощью нелинейного преобразователя 10, имеющего входные сигналы /jAj и MC.
Если закон нелинейного преобразования будет незначительно отличаться от оптимального, то даже частичная компенсация влияния величины М на величину ш даст свой положительный эффект.
Формула изобретения
Устройство для стабилизации скорости движения транспортного средства, содержащее задатчик и датчик скорости транспортного средства, выход последнего из которых через формирователь импульсов подключен к
одному из входов блока совпадения, другой вход которого подключен к выходу управляемого генератора, а выход через интегрирующий усилитель связан с исполнительным механизмом топливоподающего органа двигателя, отличающееся тем, что, с целью повьпиения точности поддержания скорости транспортного средства, оно снабжено датчиком нагрузочного молота вала двигателя, нелинейным преобразователем и сумматором, один нз входов которого объединен с первым входом нелинейного преобразователя, и подключен к выходу задатчика скорости, другой вход - к выходу нелинейного преобразователя, а выход - к входу управляемого генератора, причем второй
вход нелинейного преобразователя подключен к выходу датчика нагрузочного момента вала двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скоростидВигАТЕля | 1979 |
|
SU798748A1 |
| Устройство для защиты от боксования и юза колес транспортного средства | 1983 |
|
SU1139653A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА К ДИЗЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2011552C1 |
| Регулятор частоты вращения вала энергетической установки | 1989 |
|
SU1740734A1 |
| Устройство для управления процессом бурения | 1989 |
|
SU1647126A1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| СПОРТИВНЫЙ ТРЕНАЖЕР | 1994 |
|
RU2128072C1 |
Изобретение относится к области транспортной техники и применяется для поддержания постоянной скорости, например при стендовых испытаниях. Целью изобретения является повышение точности поддержания постоянной скорости. Устройство позволяет с высокой точностью поддерживать постоянную скорость независимо от увеличения нагрузки- на вал двигателя за счет введения датчика 9 нагрузочного мо.мента вала двигателя 8, подключенного к второму входу нелинейного преобразователя 10, первый вход которого подключен к задатчику 1 скорости, а выход - к сумматору 11, другой вход которого подключен к выходу задатчика 1. При изменении нагрузки на валу двигателя 8 нелинейный преобразователь 10 вырабатывает такой сигнал, что он, проходя через сумматор 11, изменяет частоту управляемого генератора 5 таким образом, что среднее значение тока, поступающего на вход исполнительного механизма 7, компенсирует падение скорости транспортного средства. 1 ил. i W со о О5 ел 4: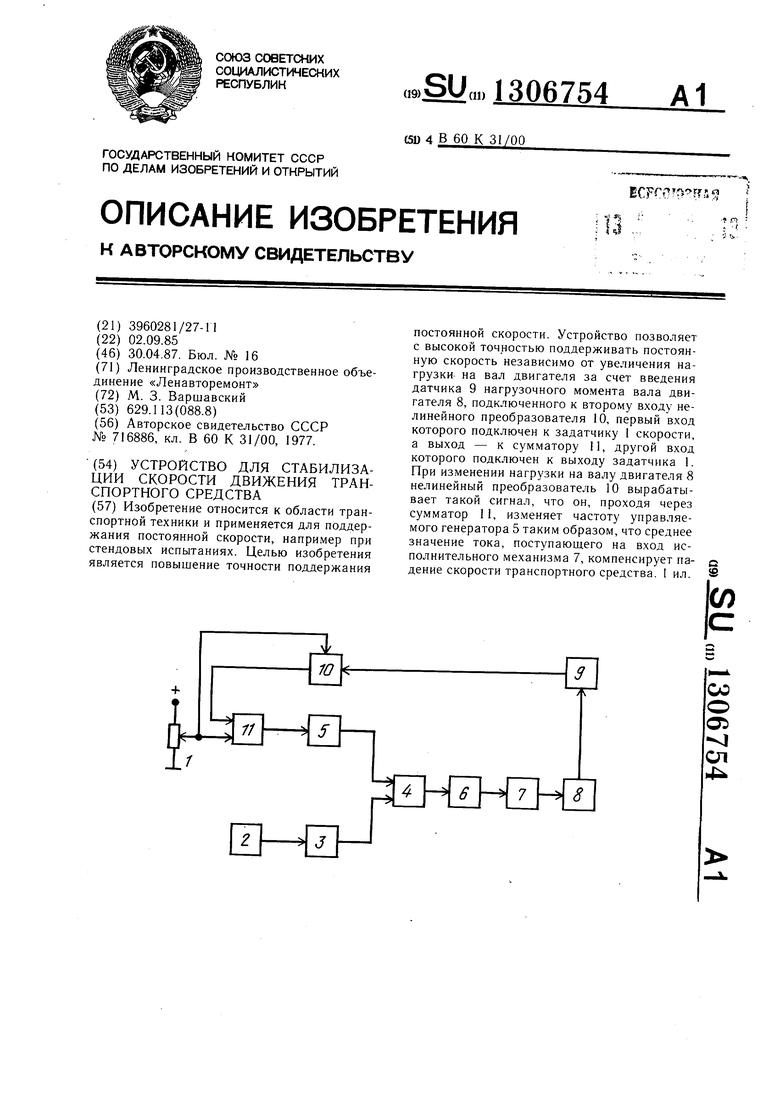
| Стабилизатор скорости движения транспортного средства | 1977 |
|
SU716886A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
