1
(21)4688642/03
(22)05.05.89
(46) 07.05.91. Бюл. IP 17
(71)Всесоюзный научно-исследовательский институт методики и техники разведки
(72)В.И.Васильев, И.С.Егоров, К.Л.Заборский, С.А.Серов иЮ.А.Серов
(53)622.24(088.8)
(56)Авторское свидетельство СССР № 1033717, кл. Е 21 В 44/00, 1981.
Авторское свидетельство СССР № 739219, кл. F 21 В 45/00, 1978.
(54)УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ
(57)Изобретение относится к автоматическому управлению параметрами режима бурения скважины и позволяет повысить точность поддержания осевой нагрузки (ОН) для буровых станков с гидравлической системой подачи.Устр-во состоит из генератора I пилообразного напряжения, датчиков 2 и 6 угла поворота рукоятки дросселя и ОН, блока 3 вычисления коэффициента усиления, усилителя 4, задатчика 5 ОН,сумматора 7, регулятора 8, блоков 9 и 10 сравнения (БС) и исполнительного механизма (ИМ) 11. В устр-ве для равномерного изменения ОН во всем диапазоне поворота рукоятки дросселя изменяется скорость ИМ 41, перемещающего рукоятку. Для этого сигнал с датчика 2 через блок 3 подается на управляющий вход усилителя 4, а сигнал с генератора 1 через усилитель 4 и сумматор 7 подается на первые входы БС 9 и 10. Текущее и заданное значения ОН фиксируются датчиком 6 и задатчиком 5 соответственно. Сигнал рассогласования с регулятора 8 поступает на вторые входы БС 9 и 10. В зависимости от величины и знака рассогласования управляющий сигнал определенной величины с БС 9 и 10 воздействует на ИМ 11. 4 ил.
(П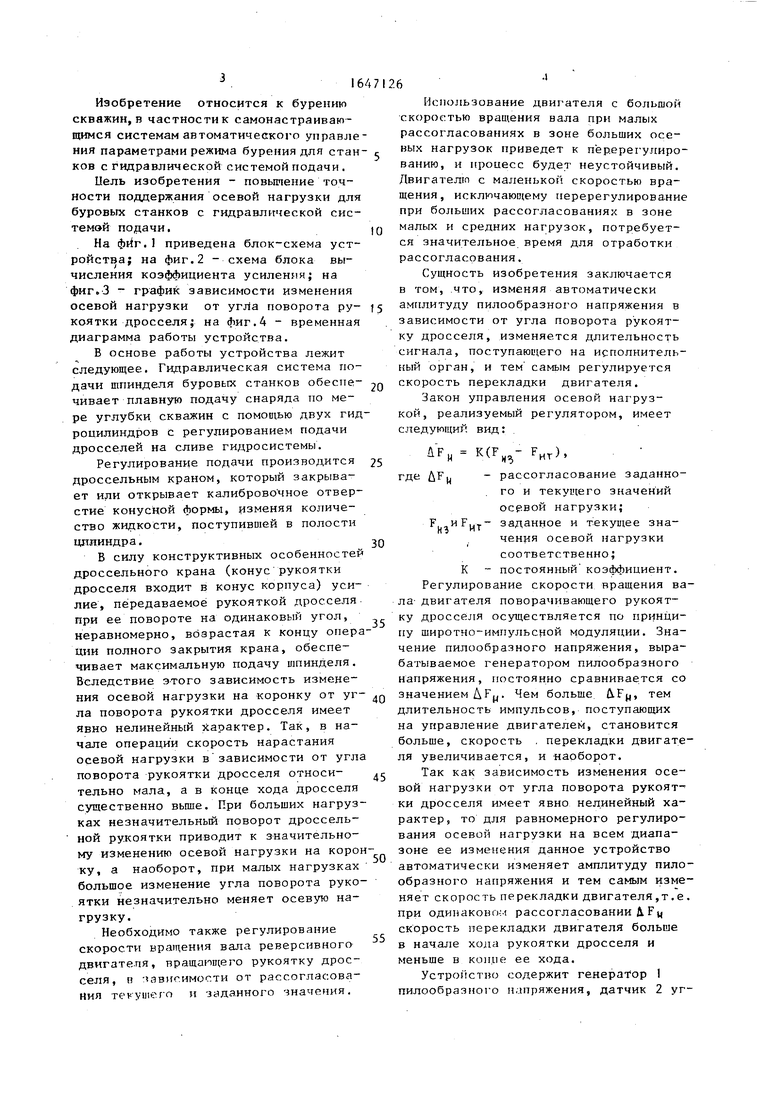


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 1990 |
|
RU2014445C1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Система автоматического регулирования осевой нагрузки частоты вращения | 1990 |
|
SU1719122A1 |
| Регулятор подачи бурового инструмента | 1987 |
|
SU1439232A1 |
| Устройство для автоматического напольного транспортирования груза | 1984 |
|
SU1263556A1 |
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 1990 |
|
RU2041348C1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |


о
4ь 1
Ю
ОЭ
Изобретение относится к бурению скважин, в частностик самонастраивающимся системам автоматического управления параметрами режима бурения для стан ков с гидравлической системой подачи .
Пель изобретения - повышение точности поддержания осевой нагрузки для буровых станков с гидравлической системой подачи.
На фйг.1 приведена блок-схема устройства; на фиг.2 - схема блока вычисления коэффициента усиления; на фиг.З - график зависимости изменения осевой нагрузки от yrrta поворота ру- коятки дросселя} на фиг.4 - временная диаграмма работы устройства.
В основе работы устройства лежит следующее. Гидравлическая система подачи шпинделя буровьк станков обеспе- чивает плавную подачу снаряда по мере углубки скважин с помощью двух гидроцилиндров с регулированием подачи дросселей на сливе гидросистемы.
Регулирование подачи производится дроссельным краном, который закрывает или открывает калибровочное отверстие конусной формы, изменяя количество жидкости, поступившей в полости цилиндра.
В силу конструктивных особенностей дроссельного крана (конус рукоятки дросселя входит в конус корпуса) усилие, передаваемое рукояткой дросселя при ее повороте на одинаковый угол, неравномерно, возрастая к концу операции полного закрытия крана, обеспечивает максимальную подачу шпинделя, Вследствие этого зависимость изменения осевой нагрузки на коронку от уг- ла поворота рукоятки дросселя имеет явно нелинейный характер. Так, в начале операции скорость нарастания осевой нагрузки в зависимости от угла поворота рукоятки дросселя относи- тельно мала, а в конце хода дросселя существенно выше. При больших нагрузках незначительный поворот дроссельной рукоятки приводит к значительному изменению осевой нагрузки на коронку, а наоборот, при малых нагрузках большое изменение угла поворота рукоятки незначительно меняет осевую нагрузку.
Необходимо также регулирование скорости вращения вала реверсивного двигатепя, вращающего рукоятку дросселя, п от рассогласования Tevyuiero и заданного -значения.
Q
5
Q
5 0
Q
5
0
5
Использование двигателя с большой скоростью вращения вала при малых рассогласованиях в зоне больших осевых нагрузок приведет к перерегулированию, и процесс будет неустойчивый. Двигателю с маленькой скоростью вращения, исключающему перерегулирование при больших рассогласованиях в зоне малых и средних нагрузок, потребуется значительное время для отработки рассогласования.
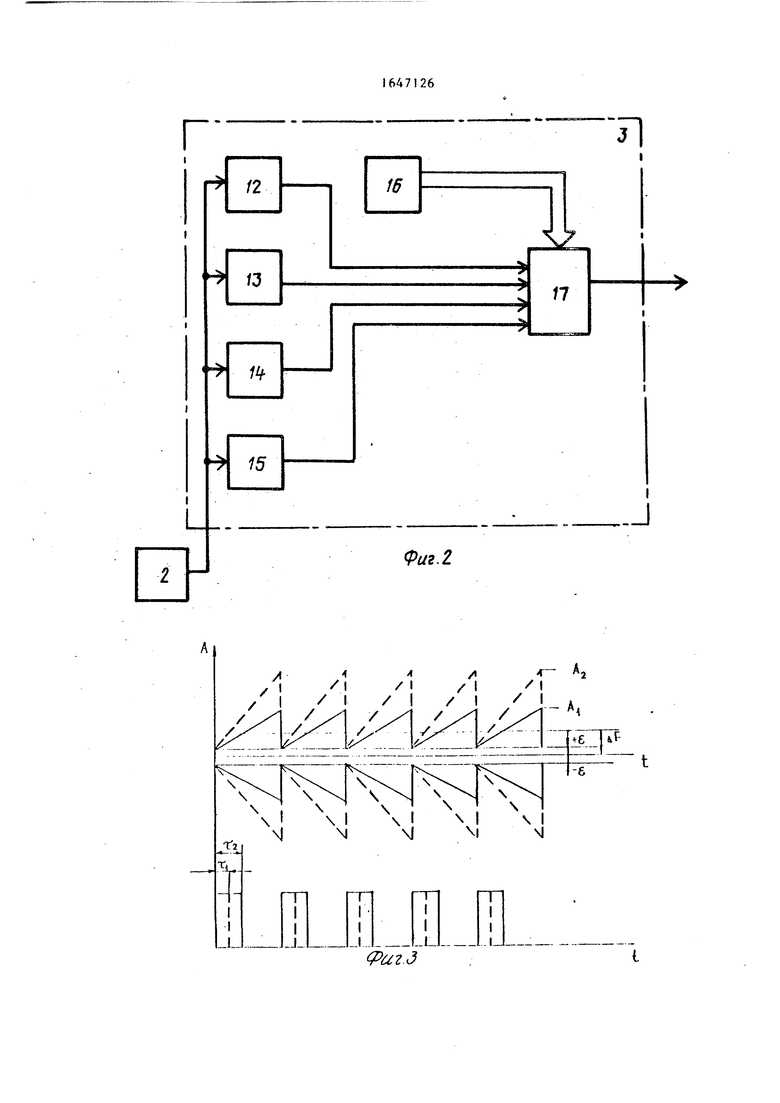
Сущность изобретения заключается в том, что, изменяя автоматически амплитуду пилообразного напряжения в зависимости от угла поворота рукоятку дросселя, изменяется длительность сигнала, поступающего на исполнительный орган, и тем самым регулируется скорость перекладки двигателя.
Закон управления осевой нагрузкой, реализуемый регулятором, имеет следующий вид:
UFH K( FHT),
где UFi, - рассогласование заданного и текущего значений осевой нагрузки;
F иГит- заданное и текущее значения осевой нагрузки соответственно; К - постоянный коэффициент. Регулирование скорости вращения вала двигателя поворачивающего рукоятку дросселя осуществляется по принципу широтно-импульсной модуляции. Значение пилообразного напряжения, вырабатываемое генератором пилообразного напряжения, постоянно сравнивается со значением AF. Чем больше U-F, тем длительность импульсов, поступающих на управление двигателем, становится больше, скорость перекладки двигателя увеличивается, и наоборот.
Так как зависимость изменения осевой нагрузки от угла поворота рукоятки дросселя имеет явно нелинейный характер, то для равномерного регулирования осевой нагрузки на всем диапазоне ее изменения данное устройство автоматически изменяет амплитуду пилообразного напряжения и тем самым изменяет скорость перекладки двигателя,т.е. при одинаковом рассогласовании 4F скорость перекладки двигателя больше в начале хода рукоятки дросселя и меньше в копне ее хода.
Устройство содержит генератор пилообразного напряжения, датчик 2 угла поворота рукоятки дросселя, блок 3 вычисления коэффициента усиления, усилитель 4, задатчик Ь осевой нагрузки, датчик 6 осевой нагрузки, сумматор 7, регулятор 8, первый блок 9 сравнения, второй блок 10 сравнения, исполнительный механизм 11. Выход датчика 2 угла поворота рукоятки дросселя подключен к входу блока 3 вычисления коэффициента усиления, выход которого соединен с одним входом усилителя 4, другой вход которого соединен с выходом генератора 1 пилообразного напряжения, а выход подключен к входу сумматора 7, выходы которого соединены соответственно с первыми входами первого 9 и второго 10 блоков сравнения, выходы которых подсоединены
к первому и второму входу исполнител
ного механизма 11. Выход датчика 6 осевой нагрузки подключен к одному входу регулятора 8, другой вход которого соединен с задатчиком 5 осевой нагрузки, а выход подключен к вторым входам первого 9 и второго 10 блоков сравнения.
В сумматоре 7 происходит суммирование сигнала с усилителя 4 и сигнала с внутреннего потенциометра, регулированием которого выставляется наружное значение Ј мертвой зоны.
Блок 3 вычисления коэффициента усления (фиг.2) содержит компараторы 12-15, узел 16 опорных напряжений и аналоговый ключ 17.
Устройство работает следующим обрзом.
Регулирование скорости изменения осевой нагрузки в зависимости от рассогласования текущего и заданного значений ДГМ осуществляется по принципу широтно-импульсной модуляции. Генератор 1 пилообразного напряжения вырабатывает импульсы пилообразной формы, которые через усилитель 4 поступают в сумматор 7 пилообразного напряжения и значения напряжения на потенциометре регулирующего диапазон мертвой точки Ј. Затем сигнал поступает с первого выхода на первый блок 9 сравнения и с инверсного на второй блок 10 сравнения, где происходит сравнение значения пилообразного напряжения с рассогласованием UF вырабатываемым регулятором 8.. Если значение ДРИ входит в пределы iЈ , регулирование осевой нагрузки прекращается при UFK Ј , в работу вклю
5
чается первый блок 9 сравнения, который сравнивает значение пилообразного напряжения с ДГ и вырабатывав ет импульсы длительности Ј (фиг.З) на увеличение осевой нагрузки. Чем больше рассогласование flF , тем больше длительность импульсов, тем больше скорость перекладки исполнительного механизма 11 на увеличение осевой нагрузки (закрытие дросселя). При работает второй блок 10 сравнения и вырабатывает импульсы определенной длительности на уменьшение осевой нагрузки.
Таким образом, в зависимости от рассогласования F у регулируется скорость перекладки исполнительного механизма 11 (реверсивного двигатеЗависимость изменений осевой нагрузки от угла поворота рукоятки дросселя ( фиг.41 снята на исследовательском стенде ВИС 3000 М. В начале
5 хода дросселя скорость нарастания осевой нагрузки мала, а в конце хода дросселя существенна. Данная зависимость не зависит от района бурения, категории пород, породоразрушающего
0 инструмента, а непосредственно от гидравлической системы станка и от конструктивных особенностей дроссельного крана. Для каждого станка эта зависимость различна. Следовательно, для равномерного изменения осевой нагрузки на всем диапазоне поворота рукоятки дросселя необходимо менять скорость исполнительного механизма 11, перемещающего рукоятку дросселя (в зоне малых изменений осевой нагрузки скорость должна быть большой, а в зоне больших изменений скорость должна быть меньше).
Для этой цели необходимо изменять скорость перекладки исполнительного механизма в зависимости от угла поворота рукоятки дроссельного крана. В данном устройстве это делается путем изменения амплитуды пилообразного напряжения усилителем 4: чем больше амплитуда пилы, тем меньше длительность импульсов, поступающих на исполнительный механизм 11, при одинаковом рассогласовании ДГц ((Ъиг.З) чем меньше скорость перекладки реверсивного двигателя. Следовательно, в начале хода дросселя амплитуда пилы должна быть небольшой, а в конце хода - максимальной. Усилитель 4
5
0
5
0
5
16
представляет собой усилитель с регулируемым коэффициентом усиления. Для определения коэффициента усиления разобьем зависимость (фиг.4) на четыре участка, на которых изменение осевой нагрузки от угла поворота рукоятки дросселя можно считать линейной, т.е. аппроксимируем данную кривую линейными отрезками, и котан- гене наклона аппроксимирующих отрезков к оси угла поворота рукоятки дросселя будем считать коэффициентом усиления для усилителя пилообразного напряжения. Данные козффици- енты выставляются в блоке 3 вычисления коэффициента усиления в узле 16 опорных напряжений, В первом 12, втором 13, третьем 14 и четвертом 15 компараторах выставляются уставки напряжения, соответствующие границам аппроксимирующих участков по оси угла поворота рукоятки дросселя. Сигнал с датчика 2 угла поворота рукоятки дросселя поступает на первый, вто- рой, третий и четвертый компараторы и в зависимости от значения этого сигнала один из четырех компараторов вырабатывает сигнал для аналогового ключа 7, который подключает соответствую щий коэффициент усиления, выставленный в узле 16 опорных напряжений, к усилителю 4.
Таким образом, в зависимости от угла поворота ручки дросселя происходит изменение значений амплитуды пилообразного напряжения (фиг.З)тем самым происходит изменение скорости двигателя, отрабатывающего рассогласование Д FJ. , т.е. при одинаковых рас- согласованиях ДРИ в начале хода ручки дросселя амплитуды пилы гораздо меньше, чем в конце хода дросселя, больше длительность импульсов, поступающих на исполнительный механизм 11, и больше скорость перекладки реверсивного двигателя и, наоборот, в конце хода ручки дросселя амплитуда пилы увеличивается, уменьшаются длительность импульсов и скорость перекладки двигателя, тем самым происходит равномерное регулирование осевой наг рузки
71:
0 5 о 5 jQ
.,. ,с
5
68
в зависимости от угла поворота ручки дросселя и повышается точность поиска и стабилизации осевой нагрузки в процессе бурения. Снижаются также затраты времени на поиск и стабилизацию осевой нагрузки и в целом ускоряется процесс бурения. Число компараторов в блоке 3 вычисления коэффициента усиления определяется числом аппроксимирующих отрезков для зависимости на фиг.З.
Использование предлагаемого устройства позволит применять двигатель с большой скоростью вращения вала, что позволит быстрее выйти на заданное значение и повысить точность стабилизации осевой нгчрузки.
Формула изобретения
Устройство для управления процессом бурения, содержащее датчик осевой нагрузки и два блока сравнения, выходы которых соединены с соответствующими входами исполнительного механизма, отлич ающееся тем, что, с целью повышения точности поддержания осевой нагрузки для буровых станков с гидравлической системой подачи, устройство снабжено генератором пилообразного напряжения, датчиком угла поворота рукоятки дросселя, блоком вычисления коэффициента усиления, усилителем, задатчиком осевой нагрузки, сумматором и регулятором, при этом выход генератора пилообразного напряжения соединен с первым входом усилителя, выход датчика угла поворота рукоятки дросселя через блок вычисления коэффициента усиления соединен с вторым входом усилителя, выход которого подключен к входу сумматора, выходы датчика и задатчика осевой нагрузки соединены соответственно с первым и вторым входами регулятора, причем первый и второй выходы сумматора соединены с первыми входами соответственно первого и второго блоков сравнения, а выход регулятора подключен к их вторым входам.
т I
гд
IN IN| N| ,
N K,N
I I I xN I
92UV9I
гд2400.
22W
2000
1SOO
1600
моо
200 4000 00 600 МО 200
30 60
540 600
Риг У
660 по iso У,гроЭ
