Изобретение относится к оборудованию автоматизированных складов, в частности к устройствам для загрузки и разгрузки стеллажей, преимущественно элеваторных.
Целью изобретения является повышение надежности захвата грузов.
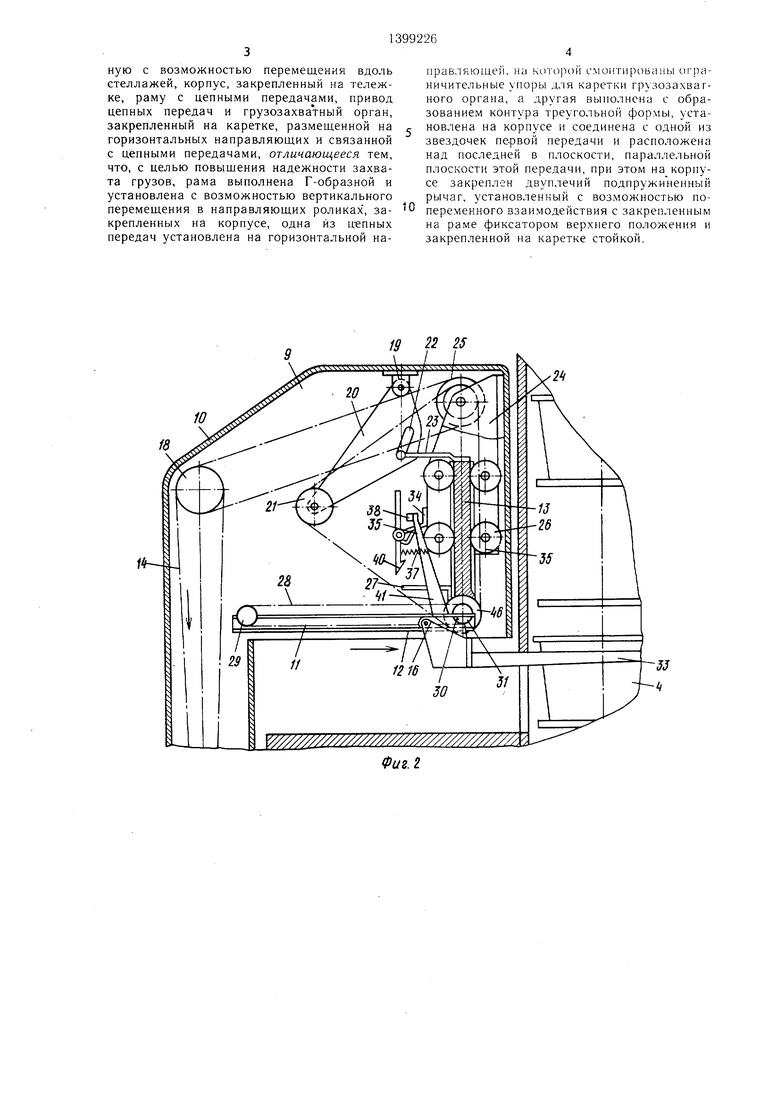
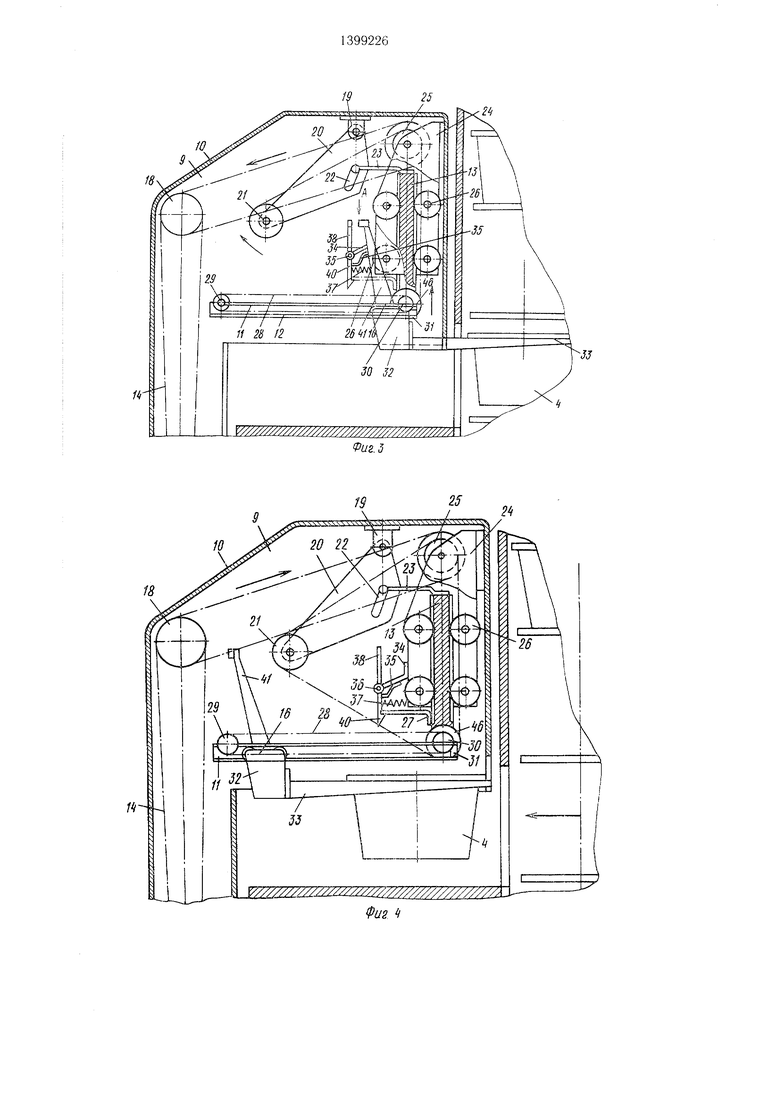
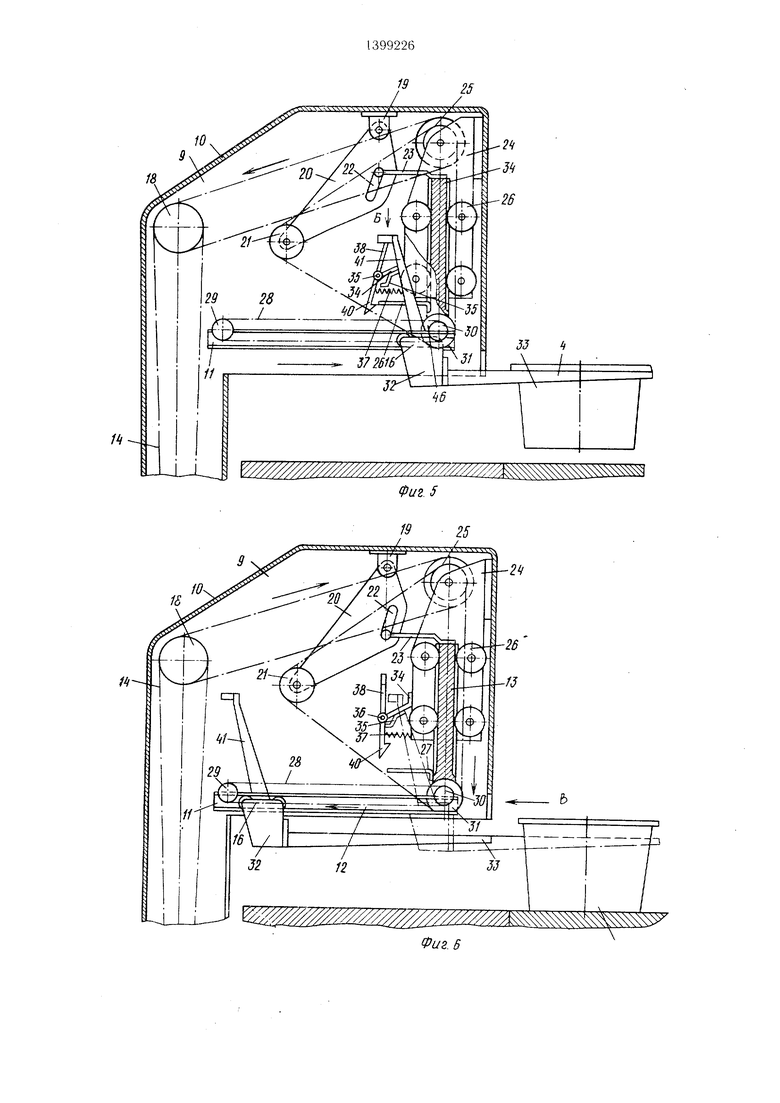
На фиг. 1 представлено устройство, общий вид, разрез по оси симметрии загрузочного механизма; на фиг. 2 - то же, в момент выдвижения захватного органа; на фиг. 3 - то же, в момент вертикального подъема захватного органа; на фиг. 4 - то же, при вытягивании груза из стеллажа; на фиг. 5 - то же, в момент установки груза на приемный стол; на фиг. 6 - то же, при отходе захватного органа; на
Звездочки 21, 25, 46 образуют цепной контур 47 треугольной формы.
Устройство для перемещения груза работает следующим образом.
В процессе разгрузки стеллажа рельсо- 5 вая тележка 8 подходит к определенному программой элеваторному стеллажу 1 и останавливается у загрузочного окна 2. Грузозахватный орган 16 при этом расположен внутри загрузочного механизма 9. В это же 10 время к окну 2 стеллажа I подходит определенная программой полка 5 с тарой 4.
Включаются от привода 15 цепные передачи 14, 28 загрузочного механизма 9. Грузо захватный орган 16, закрепленный на цепи 28, перемещается в направлении окна 2 до
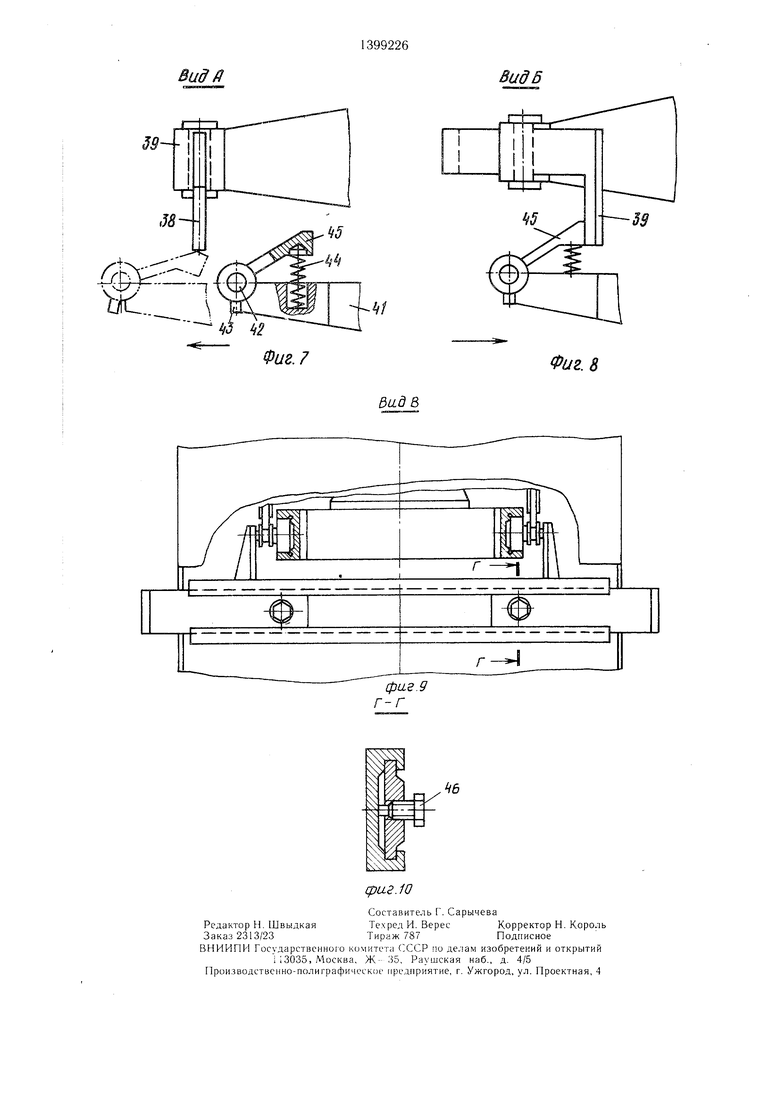
При дальнейщем движении цепной передачи за счет тяги цепногб контура и упора 31 направляющая 13 рамы 11 обкатывается по роликам 26 до тех пор, пока рычаг 27, перемещаясь по копирному зубу 40, не зафиксируется в крайне верхнем положении. Груз 4 снят с полки 5 и находится на вилах 33 (фиг. 3). При контакте зуба 40 рычага 38 с рычагом 27 срабатывает кофиг. 7 - вид А на фиг. 3; на фиг. 8 - вид Б упора 31. Вилы 33 выходят из загрузочно- на фиг. 5; на фиг. 9 - вид В на фиг. 6; наго механизма и охватывают тару 4 (фиг. 2).
фиг. 10 - разрез Г-Г на фиг. 9.
Устройство для загрузки и разгрузки стеллажей предназначено для автоматизированной складской установки, которая 2о сЬдержит элеваторный стеллаж 1 с окнами
2для разгрузки-загрузки, столешницей
3и съемной тарой 4, расположенной на полке 5. Вдоль ряда стеллажей 1 установлен направляющий рельс 6 и дополнительная
направляющая 7 для предотвращения пере- 25 нечник (не показан) и привод 15 отклю- коса загрузочного устройства.чается. При реверсе двигателя каретка 32
На рельсе 6 размещена приводная те- отходит в крайнее левое положение и груз лежка 8 (привод продольного перемещения 4 оказывается внутри загрузочного меха- не показан). На приводной тележке 8 смон- низма 9 (фиг. 4). Грузозахватный орган тирован загрузочный механизм 9, содержа- 16 вместе с грузом перемещается строго по щий корпус 10, Г-образную подвижную в П-образной траектории, причем груз подни- горизонтальном и вертикальном направле- мается строго по вертикали вверх за счет них раму 11 с направляющими 12, 13, цепную передачу 14 с приводом 15 и грузозахватный орган 16. Звездочка 17 закреплена на приводе 15, а звездочка 18 цепной передачи - на корпусе 10.
На корпусе 10 загрузочного механизма 9 через ушко 19 закреплен поворотный кронштейн 20, на конце которого смонтирована звездочка 21. Кронштейн 20 выполнен с пазом 22, в который входит водило 23, жест- 40 ко закрепленное на направляющей 13.
На корпусе 10 закреплен кронштейн 24, несущий сдвоенную звездочку 25 и четыре ролика 26, взаимодействующие с направляющей 13, на которой жестко закреплен.,. , , , .
Г-образный рычаг 27 - фиксатор крайне гивается и зуб 40 освобождает рычаг 27. верхнего положения грузозахватного органа. Загрузочный механизм возвращается в ис- На раме 11 загрузочного механизма 9 смон- ходное положение. Далее процесс выхода
вил 33 из стеллажа 1 аналогичен (фиг. 6). В предложенном устройстве предусмот- каретка. 32 с вилами 33 грузозахватного с- рено регулирование ширины вил за счет звез- органа 16. На кронштейне 24 через рычаг 34 дочек 46 (фиг. 9), что позволяет использо- и упор 35 на оси 36 закреплен подпружиненный пружиной 37 двуплечий рычаг 38, на одном конце которого смонтирован палец 39, а на другом выполнен копирный зуб 40. На каретке 32 жестко закреплена стойка 41, на 55
35
обкатывания направляющей 13 по роликам.
При ходе вверх рамы 11 захватного механизма водило 23, перемещаясь в пазу 22, отжимает кронштейн 20 вместе со звездочкой 21, обеспечивая тем самым постоянное натяжение цепи контура 47. Затем включается привод продольного перемещения рельсовой тележки 8, которая доставляет груз в требуемое место.
При обратном ходе каретки 32 (в случае установки груза на приемный стол, фиг. 5) стойка 41 через подпружиненную собачку 45 взаимодействует с пальцем 39 рычага 38, поворачивая тем самым последний вправо (фиг. 5). Пружина 37 растятирвана цепная передача 28 со звездочками 29, 30 и упор 31, на которой закреплена
вать устройство для тары различных типоразмеров.
Формула изобретения
конце которой на оси 42 с упором 43 закреплена поворотная и подпружиненная 44 собачка 45.
Устройство для загрузки и разгрузки стеллажей, преимущественно элеваторных, содержащее приводную тележку, установленЗвездочки 21, 25, 46 образуют цепной контур 47 треугольной формы.
Устройство для перемещения груза работает следующим образом.
В процессе разгрузки стеллажа рельсо- 5 вая тележка 8 подходит к определенному программой элеваторному стеллажу 1 и останавливается у загрузочного окна 2. Грузозахватный орган 16 при этом расположен внутри загрузочного механизма 9. В это же 0 время к окну 2 стеллажа I подходит определенная программой полка 5 с тарой 4.
Включаются от привода 15 цепные передачи 14, 28 загрузочного механизма 9. Грузо захватный орган 16, закрепленный на цепи 28, перемещается в направлении окна 2 до
упора 31. Вилы 33 выходят из загрузочно- го механизма и охватывают тару 4 (фиг. 2).
При дальнейщем движении цепной передачи за счет тяги цепногб контура и упора 31 направляющая 13 рамы 11 обкатывается по роликам 26 до тех пор, пока рычаг 27, перемещаясь по копирному зубу 40, не зафиксируется в крайне верхнем положении. Груз 4 снят с полки 5 и находится на вилах 33 (фиг. 3). При контакте зуба 40 рычага 38 с рычагом 27 срабатывает ко упора 31. Вилы 33 выходят из загрузочно- го механизма и охватывают тару 4 (фиг. 2).
нечник (не показан) и привод 15 отклю- чается. При реверсе двигателя каретка 32
отходит в крайнее левое положение и груз 4 оказывается внутри загрузочного меха- низма 9 (фиг. 4). Грузозахватный орган 16 вместе с грузом перемещается строго по П-образной траектории, причем груз подни- мается строго по вертикали вверх за счет
0
.,. , , , .
гивается и зуб 40 освобождает рычаг 27. Загрузочный механизм возвращается в ис- ходное положение. Далее процесс выхода
5
обкатывания направляющей 13 по роликам.
При ходе вверх рамы 11 захватного механизма водило 23, перемещаясь в пазу 22, отжимает кронштейн 20 вместе со звездочкой 21, обеспечивая тем самым постоянное натяжение цепи контура 47. Затем включается привод продольного перемещения рельсовой тележки 8, которая доставляет груз в требуемое место.
При обратном ходе каретки 32 (в случае установки груза на приемный стол, фиг. 5) стойка 41 через подпружиненную собачку 45 взаимодействует с пальцем 39 рычага 38, поворачивая тем самым последний вправо (фиг. 5). Пружина 37 растявил 33 из стеллажа 1 аналогичен (фиг. 6). В предложенном устройстве предусмот- рено регулирование ширины вил за счет звез- дочек 46 (фиг. 9), что позволяет использо-
вать устройство для тары различных типоразмеров.
Формула изобретения
вил 33 из стеллажа 1 аналогичен (фиг. 6). В предложенном устройстве предусмот- рено регулирование ширины вил за счет звез- дочек 46 (фиг. 9), что позволяет использо-
Устройство для загрузки и разгрузки стеллажей, преимущественно элеваторных, содержащее приводную тележку, установленную с возможностью перемещения вдоль стеллажей, корпус, закрепленный на тележке, раму с цепными передачами, привод цепных передач и грузозахватный орган, закрепленный на каретке, размещенной на горизонтальных направляющих и связанной с цепными передачами, отличающееся тем, что, с целью повыщения надежности захвата грузов, рама выполнена Г-образной и установлена с возможностью вертикального перемещения в направляющих роликах , закрепленных на корпусе, одна из ц епных передач установлена на горизонтальной на
иравляющеи, на которой смонтирован) ограничительные упоры для каретки грузозахватного органа, а другая выполнена с образованием контура треугольной формы, установлена на корпусе и соединена с одной из звездочек пе-рвой передачи и расположена над последней в плоскости, параллельной плоскости этой передачи, при этом на корпусе закреплен двуплечий подпружиненный рычаг, установленный с возможностью попеременного взаимодействия с закрепленным на раме фиксатором верхнего положения и закрепленной на каретке стойкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки и разгрузки стеллажей | 1983 |
|
SU1134484A1 |
| Устройство для поштучной выдачи грузов с гравитационного стеллажа | 1987 |
|
SU1472375A1 |
| Механизм ориентации устройства для загрузки и разгрузки стеллажа | 1985 |
|
SU1324959A1 |
| Подвесной конвейер | 1990 |
|
SU1728091A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Крепеукладчик | 1988 |
|
SU1645537A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU887389A1 |
| Грузоподъемная площадка крана- шТАбЕлЕРА | 1978 |
|
SU796128A1 |

10
18
19 22 25
/
2
10
18
2f
ю
18
18
fO
Фиг. 6
В ид и
Фаг. 7
ВидБ
Фиг. В
| Устройство для загрузки и разгрузки стеллажей | 1983 |
|
SU1134484A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
