Изобретение относится к машиностроению, в частности к устройствам управления для ковочных машин.
Целью изобретения является повыше- ние производительности и надежности работы путем исключения лишних ударов бабы молота.
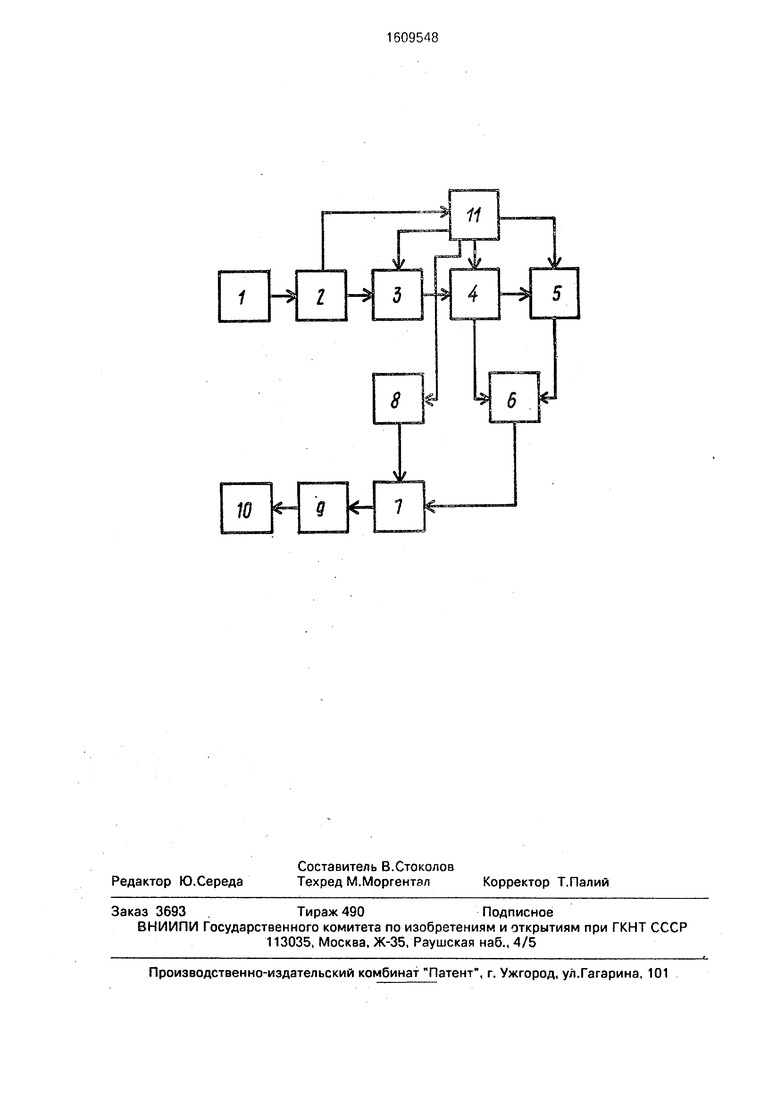
На чертеже приведена блок-схема предлагаемой системы управления молотом.
Система управления молотом содержит последовательно соединенные датчик 1 хода бабы, формирователь 2 импульсов, счётчик 3, регистр 4 текущей высоты, регистр 5 предыдущей высоты, причем выходы обоих регистров соединены с входами блока 6 сравнения, выход которого подсоединен к одному из входов таймера 7, а к второму
входу которого подсоединен задатчик 8 программы. К вь1ходу таймера 7 подключен усилитель-преобразователь 9, выход которого соединен с приводом 10 бабы молота. Вход блока 11 управления подсоединен к формирователю 2 импульсов, а выходы - к счетчику 3, регистру 4 текущей высоты, регистру 5 предыдущей высоты и задатчику 8 программы.
Система управления молотом работает следующим образом.
Расстояние, пройденное бабой молота, характеризуется количеством импульсов, поступающих с датчика .1 на формирователь 2 импульсов, с которого нормализованные импульсы поступают на счетный вход счетчика 3. Суммарное количество импуль; сов, характеризующее .ход бабы молота, заОч
о о
со
поминается в регистре 4 текущей высоты. Количество импульсов, содержащееся в этом регистре, сравнивается с количеством импульсов Б регистре 5 предыдущей высоты (причем при первом ударе значение числа импульсов регистра 5 равно 0). Разница в количествах импульсов определяется в блоке 6 сравнения, Если число импульсов равно, это означает, что деформация закончена и блок 6 сравнения выдает сигнал остановки на таймер 7. Если количество импульсов в регистре 4 текущей высоты больше количества импульсов в регистре 5 предыдущей высоты, т, е. деформация еще продолжается, таймер 7 по программе Штамповки, за- писзннай в задатчике 8, вырабатывает импупьс с длительностью, указанной в программе, который усиливается в усилителе- преобразователе 9 (осуществляющем также гальваническую развязку сигналов) и подается на привод 10 бабы молота, устанавливая время открытия окон золотника в приводе молота, Блок 11 управления, организуя функционирование системы, работает следующим образом.
При ходе бабы молота вверх после окончания удара с формирователя 2 импульсов на блок 11 управления поступает сигнал окончания штамповки, по которому блок 11 управления р)азрешает передачу информации из регистра 4 текущей высоты в регистр 5 предыдущей высоты и прием информации с счетчика 3 в регистр 4 текущей высоты. Затем блок 11 управления разрешает регистрам 4 и 5 выдачу информации в блок 6 сравнения. Одновременно вырабатывается команда для задатчика 8 программы на перевод строки. Блок 11 управления также осуществляет обнуление счетчика 3.
При нанесении каждого последующего удара система работает аналогичным образом. Цикл штамповки продолжается до окончания процесса деформации или программы.
Эффективность использования предлагаемой системы управления обусловливается повышением производительности и надежности работы за счет исключения лишних ударов молота, что достигается более точным определением окончания процесса ковки.
Формула изобретения Система управления молотом, содержащая привод бабы молота, задатчик программы, блоки сравнения и управления, а также соединенные последовательно датчик хода бабы, формирователь импульсов и счетчик, отличающаяся тем, что, с целью повышения производительности и
надежности работы путем исключения лиш- них ударов бабы молота, она снабжена регистрами текущей и предыдущей высоты, таймером и усилителем-преобразователем, выход которого подключен к входу привода
бабы молота, а вход соединен с выходом таймера, входы которого подключены один к выходу задатчика программы, другой к выходу блока сравнения, входы которого соединены соответственно с выходами регистров текущей и предыдущей высоты, причем аторой выход формирователя импульсов соединен с входом блока управления, выходы которого подключены - первый к входу задатчика программы, второй и третий к управляющим входам обоих регистров, четвертый к обнуляющему входу счетчика, выход которого через регистр текущей высоты подключен к информационному входу регистра предыдущей высоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления молотом | 1986 |
|
SU1391793A1 |
| Система управления паровоздушным штамповочным молотом | 1985 |
|
SU1310087A1 |
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Система управления молотом | 1983 |
|
SU1082536A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Система управления штамповочным молотом | 1984 |
|
SU1175632A1 |
| Система управления штамповочным молотом | 1986 |
|
SU1388173A1 |
| Система управления молотом | 1982 |
|
SU1060290A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Устройство для программного регулирования | 1986 |
|
SU1345178A1 |
Изобретение относится к машиностроению, в частности к устройствам управления для ковочных машин. Цель изобретения - повышение производительности и надежности работы путем исключения лишних ударов бабы молота. Это достигается более точным определением момента окончания процесса ковки, т.е. прекращения деформации поковки. Для этого сигналы датчика хода бабы молота через формирователь и счетчик подаются в регистр текущей высоты, где эта информация запоминается в виде величины данного хода бабы, а в аналогичном регистре предыдущей высоты содержится информация, переведенная из первого регистра, о величине предыдущего хода бабы. Выходы обоих регистров подключены к блоку сравнения, где вырабатывается сигнал разности сравниваемых значений. Выход блока сравнения через таймер, подключенный также к задатчику программы, соединен с усилителем-преобразователем привода бабы молота. Таким образом сигнал блока сравнения через таймер определяет время открытия золотника в приводе молота. При получении нулевого сигнала сравнения процесс ковки прекращается, так как величины текущего и предыдущего ходов бабы оказываются равными. Этим обуславливается эффективность использования системы. 1 ил.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
