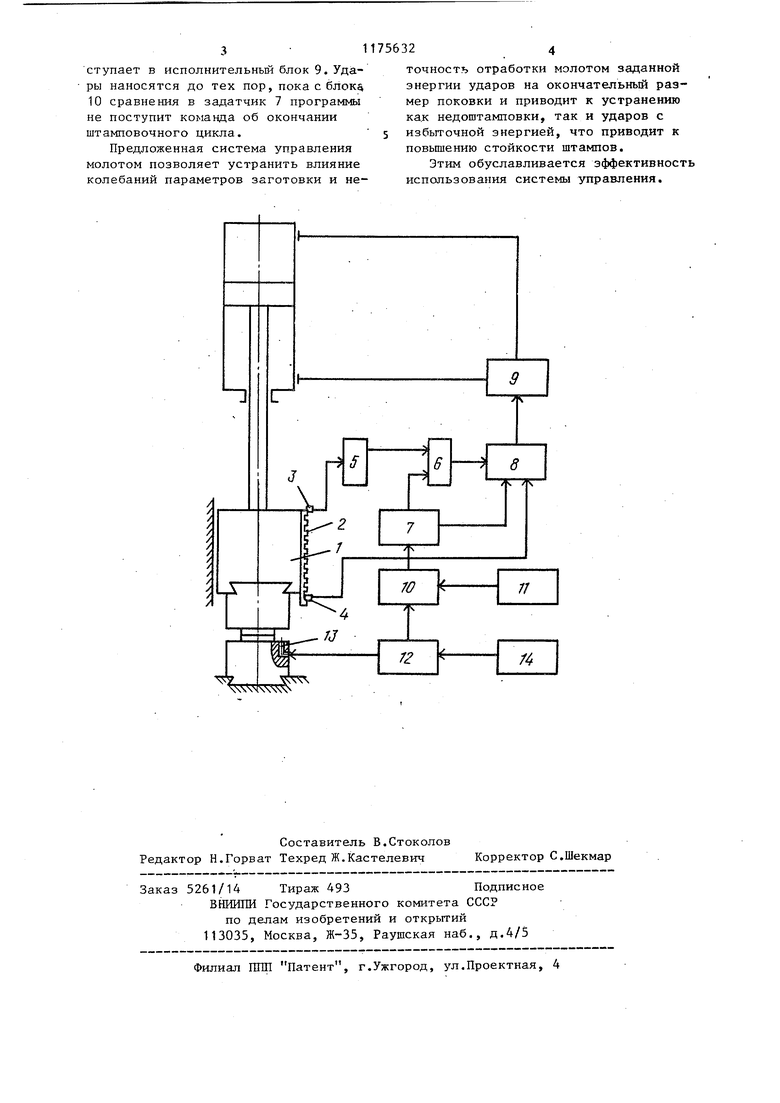
1 Изобретение относится к машиностроению, в частности к конструкции оборудования для обработки давлением Целью изобретения является повышение точности поковок путем контро.ля их высоты во время штамповки и. введения соответствующей коррекции в задание энергии ударов. Последнее 1акже исключает работу с избыточной энергией удара, что приводит к увели чению стойкости штампов. На чертеже представлена предложен ная система, блок-схема. Система управления молотом содержит установленный на подвижных частях (бабе) 1 задатчик 2 импульсов в виде зубчатой рейки, взаимодействующей с бесконтактными датчиками 3 и 4 положениями бабы, основной 3 и допол нительный 4 датчики. Выход датчика 3 .связан с входом блока 5 вычисления высоты подъема бабы, выход которого связан с входом блока 6 совпадения высоты подъема бабы, другой вход которого связан с выходом задатчика 7 программы, а выход связан с входом исполнительного блока 8, другие входы которого соответственно связаны с выходом дополнительного датчика 4 и выходом задатчика 7 программы, а выход блока 8 связан с приводом 9 молота. Вход задатчика 7 программы связан с выходом блока 10 сравнения входы которого связаны с выходом задатчиком 11 вертикальных размеров поковки и выходом пневмоэлектричес- кого преобразователя 12, другой выход которого пневматически связан с входом пневматического датчика 13, а вход пневматически связан с выходом компрессора 14. Система управления работает следующим образом. В исходном положении баба 1 нахо дится в верхнем положении. С блока задатчика 7 программы в исполнитель ный блок 8 вырабатывает управляющий сигнал, который поступает в привод 9 молота. Баба 1 начинает разгонять ся энергоносителем до момента дости жения пололсения, соответствующего дополнительному датчику 4. При этом в исполнительный блок 8 поступает команда на ход подвижных частей вверх. В процессе деформирования по ковки выдувается струя воздуха из пневматического датчика 13, установ пенного в нижнем штампе в направле32нии движения верхнего штампа. По мере приближения верхнего штампа к нижнему увеличивается сопротивление истечению воздуха и уменьшается расход из пневматического датчика 13. Так как расход воздуха из компрессора 14 постоянный, то увеличивается давление воздуха в пневмоэлектрическом преобразователе 12. Изменению давления воздуха соответствует изменение электрического сигнала, поступающего с пневмоэлектрического преобразователя 12 в блок 10 сравнения. На другой вход блока 10 сравнения поступает сигнал с выхода задатчика 11 вертикальных размеров поковки. Если сигнал с пневмоэлектрического преобразователя 12 равен сигналу с задатчика 1 1, соответствующему конечному размеру поковки, то с блока 10 сравнения в задатчик 7 программы поступает сигнал на окончание технологического цикла. Если поковка недоштампована, то с блока 10 сравнения задатчик 7 программь поступает сигнал, свидетельствующий о разности заданной h. и полученной h,, высот поковки. Этот сигнал соответствует величине энергии ДЕ, необходимой для доштамповки поковки. С задатчика 7 nporpaMND i в блок 6 совпадения высоты подъема бабы поступает сигнал, соответствующий высоте подъема бабы 1 Н , необходимой для доштамповки заданной поковки, затем задатчик 7 программы вырабатывает сигнал на подъем бабы вверх, который поступает в исполнительный блок 8. При подъеме бабы бесконтактньй датчик 3 взаимодействует с рейкой 2. Сигнал с датчика 3 поступает в блок 5 вычисления высоты подъема бабы, где вычисляется величина подъема Н. При этом блок 5 вырабатывает непрерывный сигнал, который поступает в блок 7 совпадения высоты подъема бабы, на другой вход которого поступает сигнал с задатчика 7 программы, соответствующий высоте подъема бабы Н, необходимой для доштамповки поковки. При совпадении этих сигналов блок 6 совпадения высоты подъема бабы вырабатывает сигнал на останов бабы, кот.орьш через исполнительный блок 8 поступает в привод 9. После останова бабы задатчик 7 программы вырабатывает сиг-, нал на нанесение удара, который по3ступает в исполнительнъш блок 9. Удары наносятся до тех пор, пока с блок 10 сравнения в задатчик 7 программы не поступит команда об окончании штамповочного цикла. Предложенная система управления молотом позволяет устранить влияние колебаний параметров заготовки и не2точность отработки молотом заданной энергии ударов на окончательньп1 размер поковки и приводит к устранению как недоштамповки, так и ударов с избыточной энергией, что приводит к повышению стойкости штампов. Этим обуславливается эффективность использования системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления молотом | 1983 |
|
SU1082536A1 |
| Система управления паровоздушным штамповочным молотом | 1985 |
|
SU1310087A1 |
| Система управления молотом | 1982 |
|
SU1060290A1 |
| Система управления молотом | 1986 |
|
SU1391793A1 |
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Система управления прессом | 1988 |
|
SU1620329A2 |
| Система управления молотом | 1989 |
|
SU1609548A1 |
| Система управления штамповочным молотом | 1986 |
|
SU1388173A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Система управления молотом | 1980 |
|
SU948515A1 |
СИСТЕМА УПРАВЛЕНИЯ ЖAMПOf ВОЧНЫМ МОЛОТОМ, содержащая связанный с приводом молота исполнительный блок, задатчик импульсов в виде зубчатой рейки, основной и дополнительный датчики положения подвижных частей, задатчик программы, а также блок совпадения высоты подъема подвижных частей, соединенный с исполнительным : блоком задатчиком программы и блоком вычисления высоты подъема подвижньгх частей, отличающаяся тем, что, с целью повышения точности поковок и стойкости штампов путем контроля высоты, поковки во время штамповки и вв.едения коррекции в задание энергии ударов, она снабжена последовательно соединенными компрес сором, пневмоэлектрическим преобрази вателем и пневмодатчиком, встроенным в нижний штамп, а также задатчиком вертикальных размеров поковки и блоком сравнения, выход которого соединен с входом задатчика п эограммы, входы блока сравнения соединены огин с выходом задатчика вертикальных раз - с меров поковки, другой - с пневмоэлек трическим преобразователем, причем (Л основной датчик положения подвижных частей подключен к входу блока вычис ления высоты подъема подвижных частей, а дополнительный - к входу исполнительного блока. ел Од со ю
| Система управления молотом | 1980 |
|
SU948515A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
