11310203
Изобретение относится к средствам автоматизации технологических процессов и может быть использовано, наприпрда ст ти 5 зо со ях
мер, в качестве захватного устройства промышленных роботов, применяемых в машиностроении, приборостроении и других отраслях техники.
Цель изобретения - увеличение универсальности устройства путем обеспечения захвата одним устройством дета-Ш вляется автономно через осевые каналей с отверстием и без отверстия.
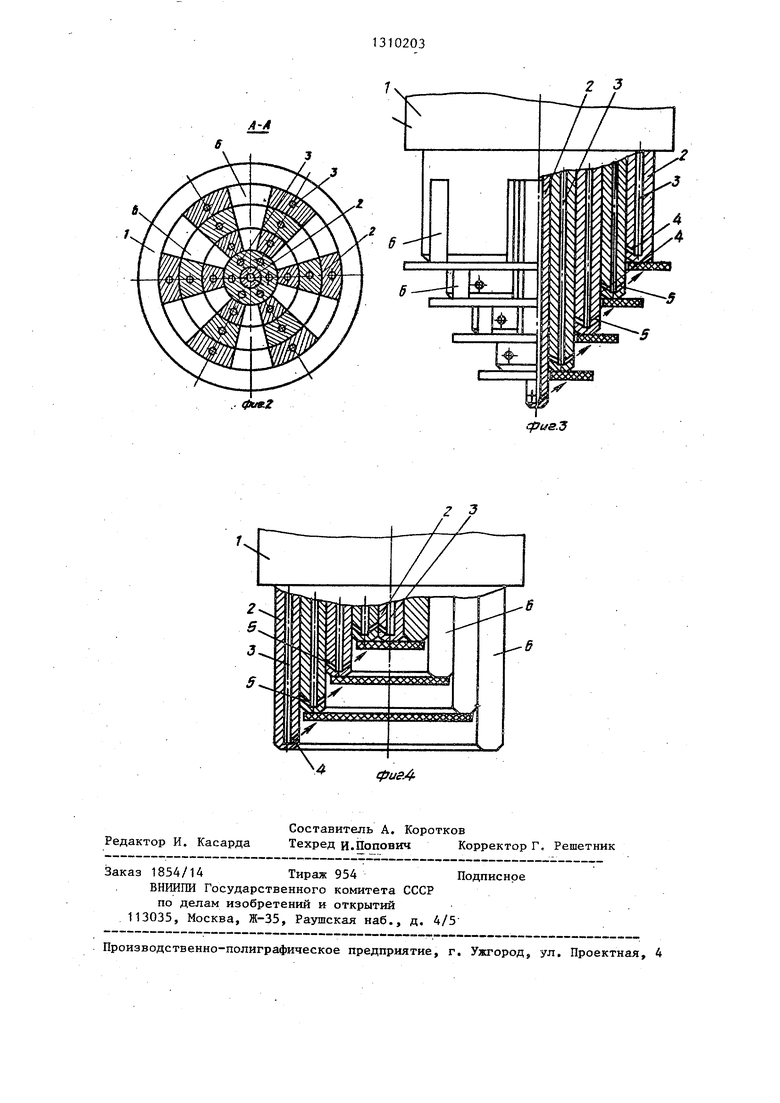
На фиг.1 изображено струйное захватное устройство, исходное состояние на фиг.2 - сечение А-А на фиг.1; на фиг.З - струйное захватное устройство в процессе переноса комплекта деталей с центральными отверстиями; на фиг.4 - струйное захватное устройство со сквозными пазами на боковых рабочих частях оправок для переноса комплектов деталей без центральных отверстий.
Струйное захватное устройство со
держит корпус 1 и стержень, с кон-, центрично расположенными автономно подвижными втулками 2, в каждой из которых вьшолнены глухие осевые каналы 3 и наклонные радиальные сопла 4 и 5, открытые соответственно внутрь и наружу стержня относительно глухих осевых каналов 3 в стороны соприкасающихся поверхностей втулок 2.
Каждая из втулок 2 наборного стержня имеет индивидуальный привод осевого перемещения и распределитель сжатого воздуха (не показаны). Боковая рабочая часть каждой втулки вы-ч полнена со сквозными пазами 6 или со сквозными отверстиями.
Струйное захватное устройство работает следующим образом.
Являясь одним из исполнительных механизмов промьшшенного робота или манипулятора, струйное захватное устройство работает от общей системы уп равления роботизированного технологического комплекса и автоматически перенастраивается из исходного состояния в рабочее, соответствующее типоразмеру и количеству подлежащих переносу и установке деталей.
Каждая из телескопических втулок 2 наборного стержня устанавливается в требуемое относительное положение индивидуальным приводом осевого пере мещения (не показан). Захват дета- лей с центральным отверстием осуществляется, например, путем введения
предварительно настроенного на заданную форму набора втулок 2 в отверстия деталей, предварительно сориен- тированных в однопозиционном загру- зочном устройстве или последовательно сориентированных в нескольких позициях загрузочного устройства.
Подача сжатого воздуха в каждую из телескопических оправок осущест
лы 3 от соответствующего распределителя (не показан). При этом создается удерживающий напор струй сжатого воздуха, который через наклонные радиальные сопла 5 давит на нижние поверхности деталей и прижимает их к соответствующим торцовым поверхностям втулок 2. Данное положение наборного стержня сохраняется в процессе
захвата деталей и их переноса в зону установки (сборки).
Захват деталей без центрального отверстия осуществляется аналогичным образом. Однако удерживающий напор струй сжатого воздуха, действующих снизу на деталь, создается в данном случае через наклонные радиальные сопла 4, открытые внутрь стержня относительно глухих осевых каналов 3 втулки 2, охватывающей деталь снаружи. При этом наличие на боковых рабочих частях каждой из втулок 2 дополнительных сквозных пазов 6 или отверстий позволяет удерживать комплекты деталей без центральных отверстий, так как через пазы 6 или отверстия подаваемый под деталь сжатьй воздух выходит в атмосферу из образовавшегося замкнутого пространства между внутренней поверхностью захвата и верхней поверхностью удерживаемой ниже детали переносимого комплекта.
Формула изобретения
Струйное захватное устройство, содержащее корпус в виде ступенчатого стержня, внутри которого выполнены глухие каналы и соединенные с ними . наклонные сопла, расположенные в каждой ступени стержня, о т л и Ч а ю- щ е е с я тем, что, с целью увеличения универс;1льности устройства, оно снабжено концентрично установленными на стержне и подвижньми вдоль его оси втулками с пазами, между которыми, в теле втулок, выполнены указанные каналы и сопла.
Л-Л
Фмг
2 3
(риа.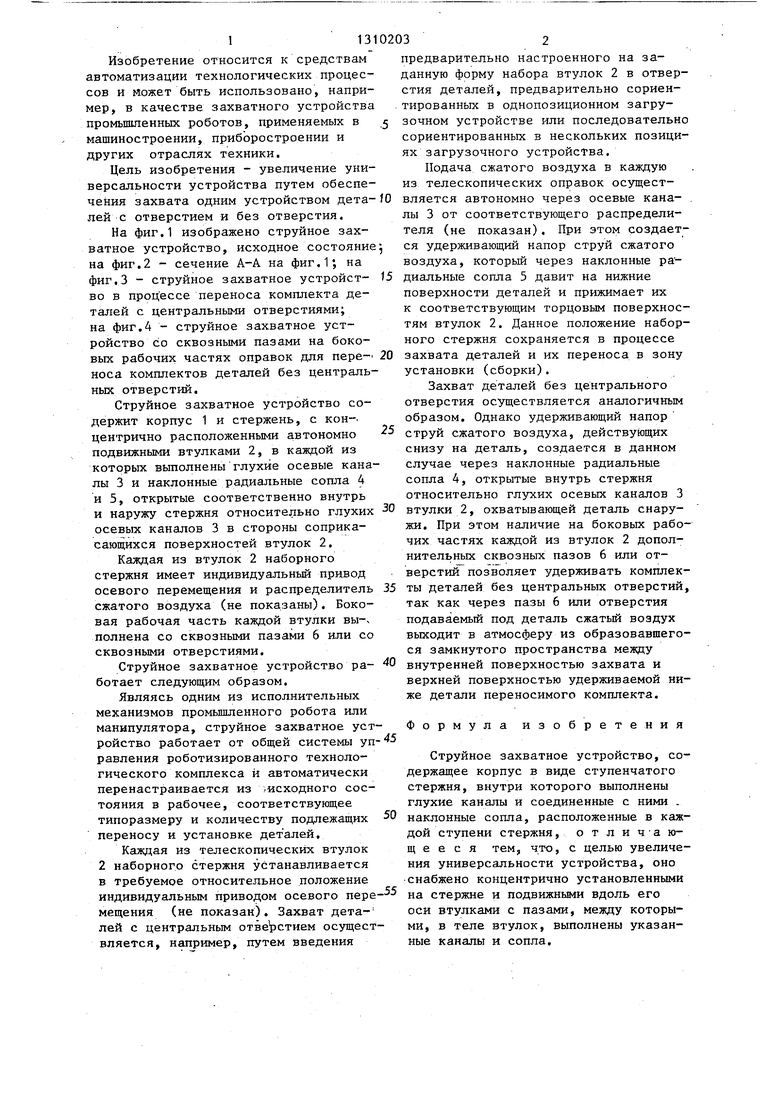
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический захват | 1983 |
|
SU1117207A1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Пневматический схват | 1983 |
|
SU1135639A1 |
| Пневматический захват | 1983 |
|
SU1098793A1 |
| СКВАЖИННЫЙ ЭЖЕКТОР | 2014 |
|
RU2560969C2 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ | 2008 |
|
RU2379556C1 |
| Захватное устройство для грузов с фигурной головкой | 1989 |
|
SU1646226A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2178842C1 |
| Сборочный автомат | 1987 |
|
SU1496983A1 |
| Пневматический захват | 1984 |
|
SU1220796A1 |
Изобретение относится к средствам автоматизации технологических процессов в машиностроении, приборостроении и др. отраслях промьшшеннос- ти и позволяет увеличить универсальность устройства. Устройство содержит корпус 1 и стержень, выполненный в виде набора автономных, концентричных, подвижных относительно одна другой втулок 2, в каждой из которых выполнены глухие осевые каналы 3 и наклонные радиальные сопла 4 и 5, открытые соответственно внутрь и наружу стержня относительно глухих осевых каналов 3 в стороны соприкасающихся поверхностей оправок. Каждая из втулок 2 наборного стержня имеет индивидуаль-i ный привод осевого перемещения и распределитель сжатого воздуха. Боковая рабочая часть каждой оправки выполнена со сквозными пазами 6 или сквозными отверстиями. 4 ил. с S 00 N3 О со фиеЛ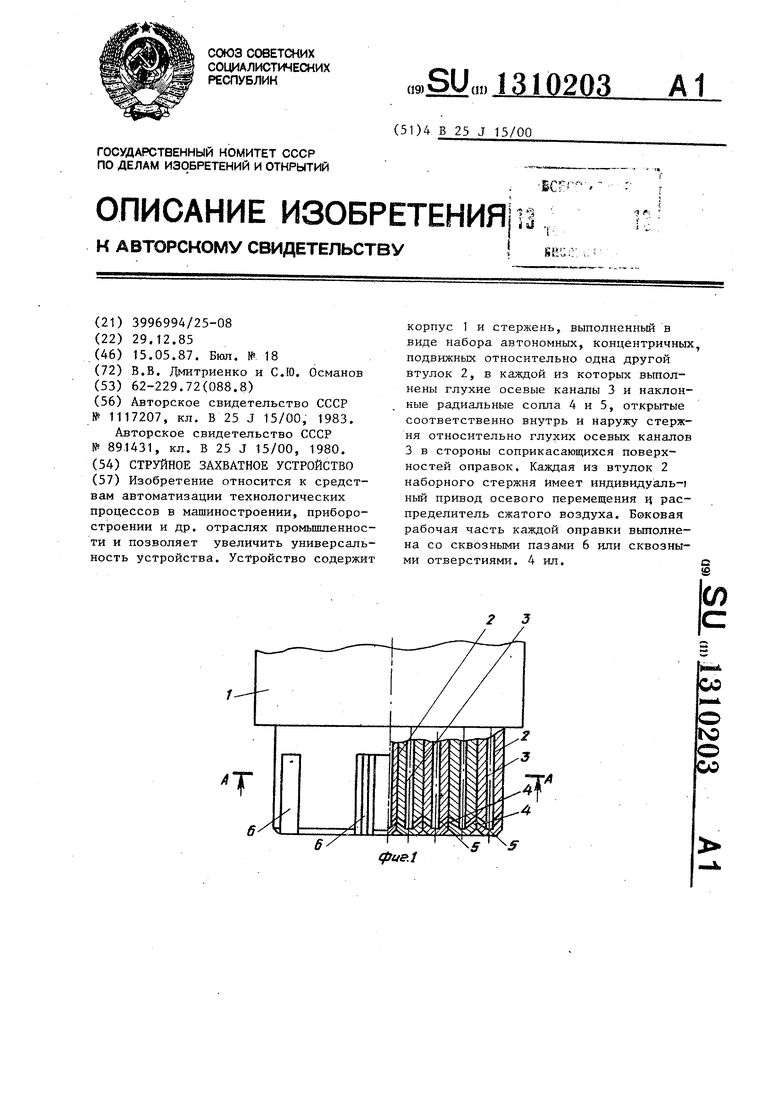
0г/г4
Редактор И. Касарда
Составитель А. Короткой
Техред И.Попович Корректор Г. Решетник
Заказ 1854/14 Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Пневматический захват | 1983 |
|
SU1117207A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
