I
Изобретение относится к средствам автоматизации технологических процессов и может быть применено, например в качестве захватных устройств промьшшенных роботов иди манипуляторов, используемых в машиностроении, приборостроении, радиоэлектронике и других отраслях техники.
Цель изобретения - повышение.гру- зопоДъемности при наборе комплектов деталей различных типоразмеров,
На чертеже изображен пневматический захват с удерживаемым комплектом сборочных деталей, разрез.
Захват содержит корпус 1 со ступенчатой частью 2, стержень 3, рас- положенньш соосно корпусу с зазором 4 между сопрягаемыми поверхностями. Соосность и прямолинейность их обеспечиваются центрирукяцим стаканом 5, в торцовой части которой выполнены отверстия 6 (окна) для подвода сжатого воздуха под удерживаемый комплект 7 собираемых деталей. Выходной участок канала подвода сжатого воздуха представляет собой кольцевую щель 8, образованную конусными сопрягаемыми поверхностями части 2 корпуса 1 и насадки 9, установленной на стержне 3.
Стержень 3 вьшолнен подвижным вдоль оси стакана 5, Механизм пере10
5
12207962
мещения стержня 3 и управления величиной кольцевой щели не показан.
Захват работает следующем образом.
Комплект 7 собираемых деталей захватывается путем введения стержня 3 и части 2 корпуса в их отверстие и прижимается к торцу части корпуса 1 напором сплошной струи сжатого воздуха, исходящего из кольцевой щели 8„ Удерживание комплекта 7 деталей сохраняется на протяжении всего процесса их переноса промьшлен- ным роботом-манипулятором (не показан) в зону установки (сборки). К выходному участку кольцевой щели 8 сжатый воздух поступает через отверстия 6 центрирующего стакана 5 и зазор 4 между сопрягаемыми поверхностями стержня 3 и части 2 корпуса 1. После.переноса комплекта 7 деталей промышленнь1м роботом или манипулятором в сборочную позицию происходит их установка. Захват начинает приближаться к установочной позиции сверггу Вниз, а сжатый воздух прекращает подаваться в корпус захвата. При этом удержание комплекта деталей потоком сжатого воздуха прекращается и они устанавливаются в технологическую машину или собираются с базовой деталью (не показаны)„
2«
2fi
30
Составитель С. Новик Редактор И. Швьщкая Техред Г.Гербер Корректоре. Черни
Заказ 1519/12 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретен:ий и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал Ш1П Патент, г. Ужгород., ул. Проектная, 4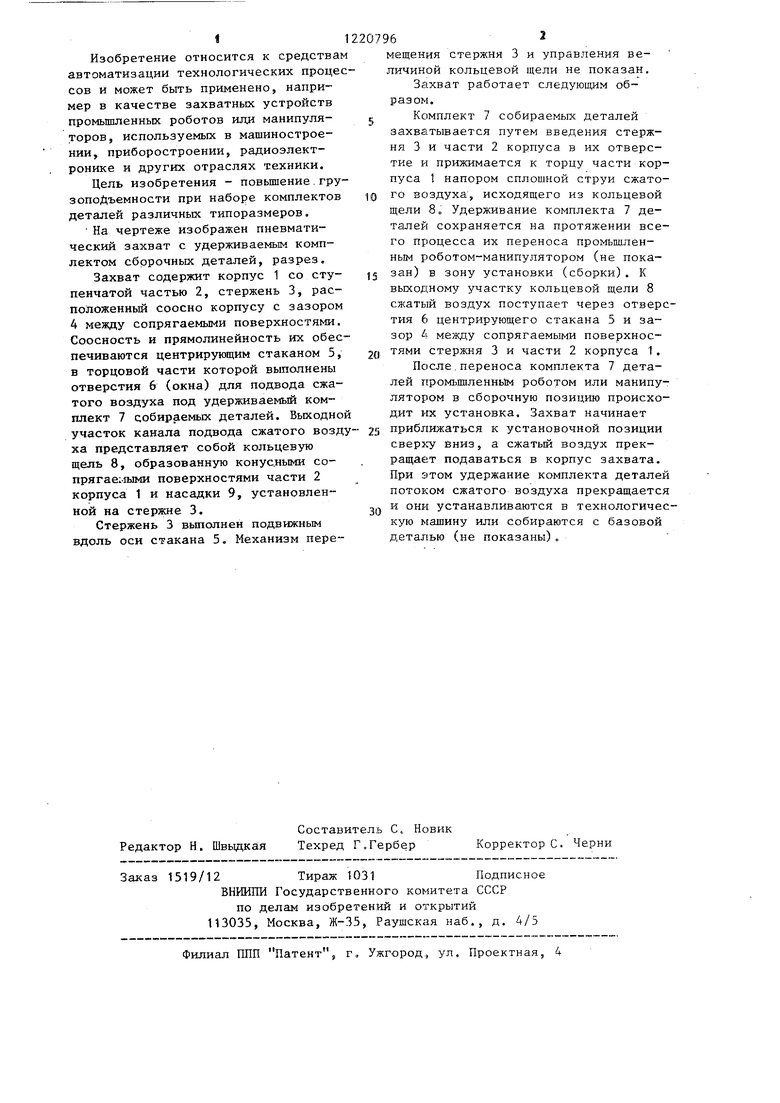
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический захват | 1983 |
|
SU1098793A1 |
| Пневматический схват | 1983 |
|
SU1135639A1 |
| Устройство для сборки деталей | 1976 |
|
SU653078A1 |
| Струйное захватное устройство | 1985 |
|
SU1310203A1 |
| Устройство для сборки деталей | 1979 |
|
SU917994A1 |
| Устройство для сборки деталей | 1977 |
|
SU663525A1 |
| Пневматический захват | 1983 |
|
SU1117207A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Пневматический захват | 1986 |
|
SU1430263A1 |
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |

| Пневматический захват для плоских деталей | 1982 |
|
SU1024275A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Захват-присос | 1980 |
|
SU965768A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Пневматический захват | 1983 |
|
SU1098793A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
