Изобретение относится к средствам автоматизации технологических процессов и может быть применено, например, в качестве захватных органов промышленных роботов и манипуляторов, применяемых в приборостроении, радиоэлектронике и других отраслях техники.
Известен пневматический захват, содержащий корпус, стержень с каналами для подвода сжатого воздуха и опорный бурт, расположенный над выходными участками каналов для подвода сжатого воздуха 1.
Недостатком известного пневматического захвата является возможность осуществления процессов сборки или загрузки технологической мащины после переноса детали лищь в тех случаях, когда ось удерживаемой захватом детали расположена соосно с сопрягаемой поверхностью, что значительно снижает технологическую надежность промыщленных роботов и манипуляторов. Причиной этого является всегда существующая погрешность позиционирования исполнительных механизмов промышленных роботов и манипуляторов. Все это сужает технологические возможности промышленных роботов и манипуляторов с пневматическими захватами и повышает требования к точности позиционирования их исполнительных механизмов, что ведет к усложнению конструкций.
Цель изобретения - повышение надежности и расширение технологических возможностей промыщленных роботов и манипуляторов с пневматическими захватами путем автопоиска допустимого отклонения относительного рассогласования осей сопрягаемых деталей.
Указанная цель достигается тем, что пневматический захват, содержащий корпус и стержень с каналами для подвода сжатого воздуха, снабжен подпружиненной относительно корпуса кольцевой камерой с центральным отверстием, в котором размешен стержень, при этом кольцевая камера установлена свободно относительно корпуса и стержня, а в корпусе выполнены каналы для подвода сжатого воздуха, выходные отверстия которых направлены в полость кольцевой камеры.
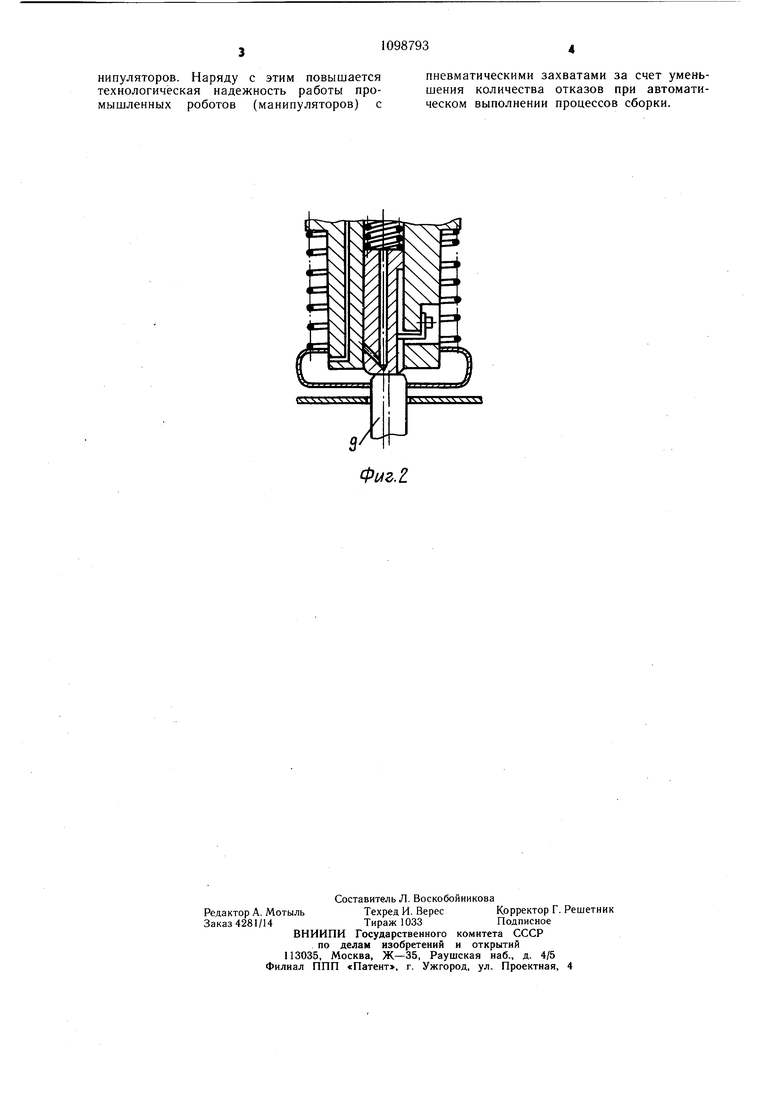
На фиг. 1 изображен захват с деталью, разрез, общий вид; на фиг. 2 - захват в процессе установки детали.
Захват содержит корпус 1 с подпружиненным стержнем 2 с каналом 3 для подвода воздействующего на деталь 4 сжатого воздуха, подпружиненную относительно корпуса кольцевую камеру 5, установленную свободно. Выходные участки 6 канала 3 расположены равномерно по окружности.
Корпус 1 снабжен равномерно расположенными по окружности каналами 7 с выходными участками 8 для подвода через распределитель (не показан) сжатого воздуха в полость кольцевой камеры 5.
Позицией 9 обозначена базовая деталь типа вала.
Захват работает следующим образом. Деталь 4 захватывается путем введения
- стержня 2 захвата в ее отверстие или другим способом. Деталь 4 прижимается струями воздуха, исходящего из выходных участков канала 3 к кольцевой камере 5, которая находится в крайнем нижнем положении. Под действием суммарной силы струй
5 сжатого воздуха деталь 4 вместе с кольцевой камерой 5 перемещаются вверх и прижимаются к корпусу 1. В исходном положении захвата обеспечивается полное выдвижение стержня 2. Данное положение стержня 2 сохраняется в процессе захвата де0 тали и переноса ее в зону установки (сборки). После переноса детали промышленным роботом или манипулятором в сборочную позицию происходит ее установка. Захват начинает приближаться к базовой детали 9,
5 в этот же момент включается распределитель (не показан), который обеспечивает поочередную подачу сжатого воздуха в кольцевую камеру 5 через выходные участки 8 каналов 7. Распределитель работает таким образом, что в момент подачи сжатого воз0 духа в один из каналов 7 остальные каналы 7 закрыты. Поочередная подача сжатого воздуха в кольцевую камеру 5 придает е.му вместе с прижатой деталью 4 сложное колебательное движение. При этом между нижним торцом корпуса 1 и внутренней по5 верхностью кольцевой камеры 5 образуется зазор, который уменьшает трение между этими поверхностями. Зазор этот увеличивается по мере опускания пневл1атического захвата промышленного робота (манипулятора) вниз и утопления стержня 2 за счет его упора в торец базовой детали 9. На протяжении всего времени сближения корпуса 1 пневматического захвата и торца базовой детали 9 происходят точностное ориентирование и автоматическая сборка
5 деталей 4 и 9, так как ось детали 4 совершает сложную траекторию движения и в итоге попадает в зону допустимого отклонения относительного рассогласования осей сопрягаемых поверхностей.
В предлагаемом устройстве расширены
0 функциональные -возможности за счет того, что имеющийся ориентатор в виде кольцевой камеры позволяет осуществлять процессы сборки или установки деталей при рассогласовании осей сопрягаемых поверхностей, возникающем за счет неточности захвата детали и существующей погрешности позиционирования исполнительных механизмов промышленных роботов и манипуляторов. Наряду с этим повышается технологическая надежность работы промышленных роботов (манипуляторов) с
пневматическими захватами за счет уменьшения количества отказов при автоматическом выполнении процессов сборки.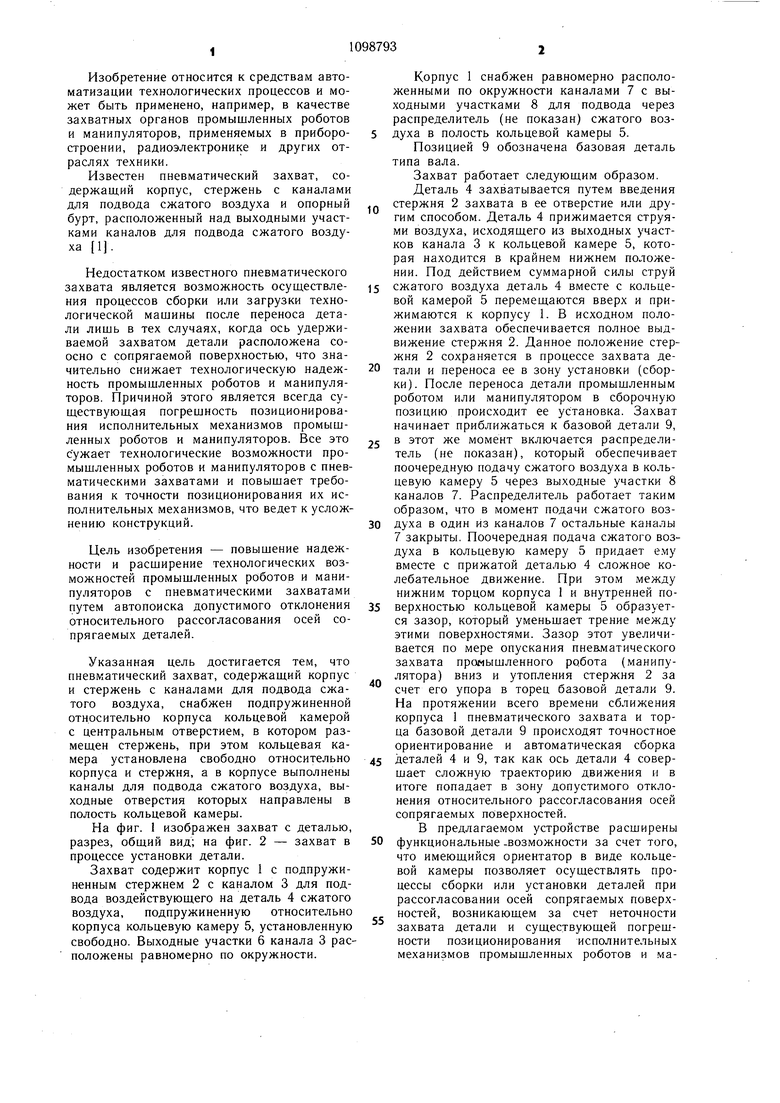
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический схват | 1983 |
|
SU1135639A1 |
| Пневматический захват | 1984 |
|
SU1220796A1 |
| Пневматический захват | 1983 |
|
SU1117207A1 |
| Устройство для автоматической сборки деталей | 1980 |
|
SU931351A2 |
| Струйное захватное устройство | 1985 |
|
SU1310203A1 |
| Устройство для сборки деталей | 1979 |
|
SU917994A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2002 |
|
RU2228258C2 |
| Пневматический захват | 1988 |
|
SU1593954A1 |
| Устройство для сборки деталей | 1976 |
|
SU653078A1 |
| Устройство для сборки деталей | 1977 |
|
SU663525A1 |
ПНЕВМАТИЧЕСКИЙ ЗАХВАТ, содержащий корпус и стержень с каналами для подвода сжатого воздуха, отличающийся тем, что, с целью повышения надежности и расширения технологических возможностей путем автопоиска допустимого отклонения относительного рассогласования осей сопрягаемых деталей, он снабжен подпружиненной относительно корпуса кольцевой камерой с центральным отверстием, в котором размещен стержень, при этом кольцевая камера установлена свободно относительно корпуса и стержня, а в корпусе выполнены каналы для подвода сжатого воздуха, выходные отверстия которых направлены в полость кольцевой камеры. О) СО СХ) со со
.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневматический захват | 1977 |
|
SU682352A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
