Изобретение относится к средствам автоматизации технологических процессов и может быть применено, например, в качестве захватных органов промышленных роботов и манипуляторов, применяемых в машиностроении, приборостроении и других отраслях техники.
Известен пневматический схват, содержаший корпус с каналом для подвода сжатого воздуха и опорным буртом, расположенным над выходным участком этого канала {1 .
Недостатками известного пневматического схвата являются невозможность захвата деталей различной наружной конфигурации, а также невозможность захвата деталей с центральным отверстием произвольной формы, без центрального отверстия и произвольно ориентированных в горизонтальной плоскости. Кроме того, грузоподъемность такого схвата сушественно зависит от ограниченного количества выходных каналов для струй сжатого воздуха., воздействующих снизу на деталь. Все это значительно снижает технологические возможности и грузоподъемность известного пневматического схвата и требует обязательной замены захватного органа промышленного робота при смене типоразмера переносимых деталей.
Цель изобретения - расширение технологических возможностей и увеличение грузоподъемности пневматических схватов.
Поставленная цель достигается тем, что пневматический схват, содержащий корпус и каналы для подвода сжатого воздуха, снабжен набором автономно подвижных стержней, установленных в корпусе, причем корпус выполнен многокамерным с гнездами под подвижные стержни, а каналы для подвода сжатого воздуха выполнены с выходом на боковые соприкасающиеся поверхности подвижных стержней и Соединены с рабочей камерой корпуса.
Это позволяет путем автоматической подачи удерживающих струй сжатого воздуха по всему периметру (наружному и внутреннему контурам) нижней поверхности захватывать детали различной наружной конфигурации (с центральным отверстием ,любой формы и без него). Наряду с этим устраняется влияние на надежность процесса захвата детали неточности (произвольности) ее ориентирования в исходной позиции, а также значительно увеличится и грузоподъемность пневматического схвата, так как число действующих на нижнюю поверхность детали удерживающих струй сжатого воздуха возрастает - будут действовать по всему наружному и внутреннему контурам нижней поверхности детали.
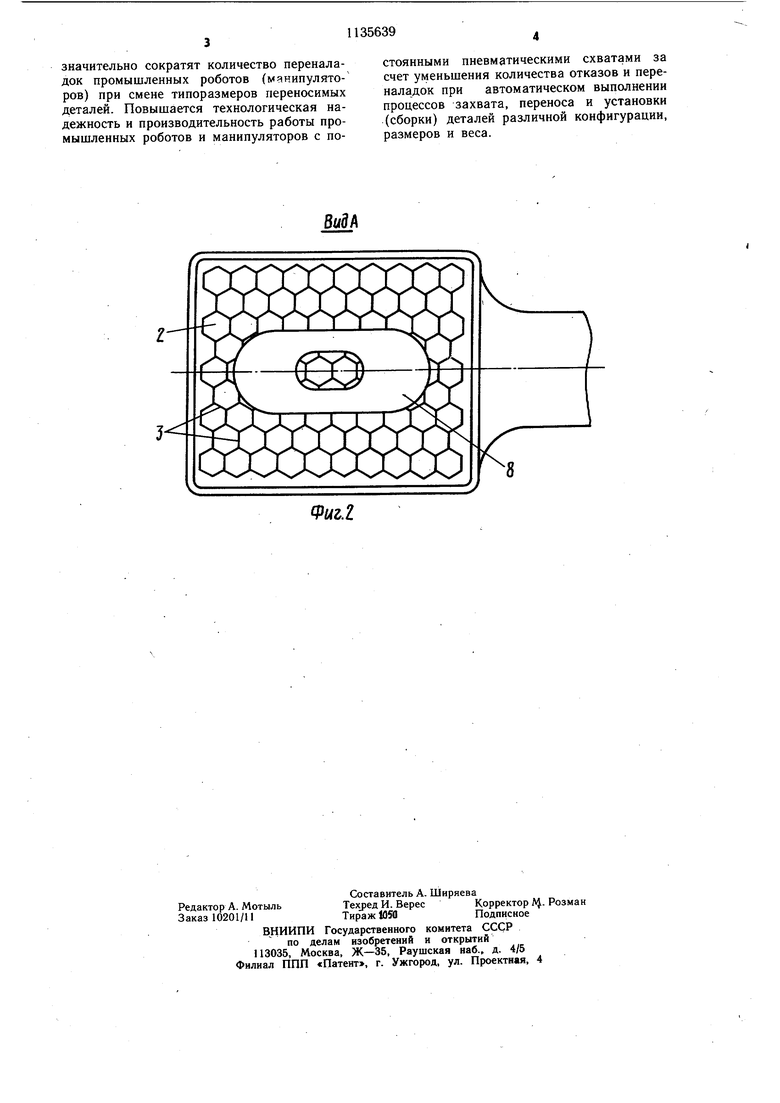
На фиг. 1 показан пневматический схват, общий вид; на фиг. 2 - вид А на фиг. 1.
Схват содержит корпус 1 с набором автономно подвижных стержней 2, рабочая поверхность которых выполнена, например, с шестигранным профилем. Каждый подвижный стержень 2 расположен в отдельном гнезде корпуса и имеет возможность двигаться независимо от других стержней 2. На соприкасающихся рабочих поверхностях 3 автономно подвижных стержней 2 выполнены выходные участки 4 каналов 5 подвода сжатого воздуха. Корпус схвата имеет две камеры 6 и 7, соединенные с распределителем сжатого воздуха (не.показан). На фиг. 1 и 2 показана удерживаемая схватом деталь .
Пневматический схват работает следующим образом.
5 В исходном состоянии пневматического схвата сжатый воздух подается через распределитель (не показан) в предварительную камеру 6 корпуса 1, что приводит все автономно подвижные стержни 2 в выдвинутое положение. В процессе захвата детали часть автономно подвижных стержней 2, соприкасаясь с верхней поверхностью детали , утапливается в корпусе I и в дальнейшей работе не участвует (фиг. 1). В этот момент подача сжатого воздуха через распределитель происходит в рабочую камеру 7 корпуса 1, а дальше через каналы 5 и выходные участки 4, соприкасающихся рабочих поверхностей 3 автономно подвижных стержней 2 осуществляется автоматическая подача удерживающих струй сжатого воздуха по всему периметру (наружному и внутреннему контурам) нижней поверхности захватываемой детали 8. Под действием суммарной силы этих удерживающих струй сжатого воздуха деталь перемещается вверх и
„ прижимается к корпусу 1 схвата (фиг. 1). Данное положение детали 8 и автономно подвижных стержней 2 сохраняется в процессе захвата детали и переноса ее в зону установки (сборки). После переноса детали промышленным роботом или манипулятором
0 в сборочную позицию происходит ее установка. Схват начинает приближаться к установочной позиции сверху вниз, а сжатый воздух подается через распределитель в камеру 6 корпуса 1. При этом удержание детали потоком сжатого воздуха прекращается. Деталь устанавливается в технологическую машину под действием собственного веса и силы возврата утопленных в корпусе 1 автономно подвижных стержней 2 в исходное состояние.
0 Применение изобретения дает возможность захватывать одним и тем же захватом детали различной наружной конфигурации (с центральным отверстием произвольной формы и без центрального отверстия). Наря, ду с этим появляется возможность захватывать детали, неточно (произвольно) ориентированные в исходной позиции, а также значительно увеличится и грузоподъемность пневматического схвата. Данные условия
значительно сократят количество переналадок промышленных роботов (манипуляторов) при смене типоразмеров переносимых деталей. Повышается технологическая надежность и производительность работы промышленных роботов и манипуляторов с постоянными пневматическими схватами за счет уменьшения количества отказов и переналадок при автоматическом выполнении процессов захвата, переноса и установки (сборки) деталей различной конфигурации, размеров и веса.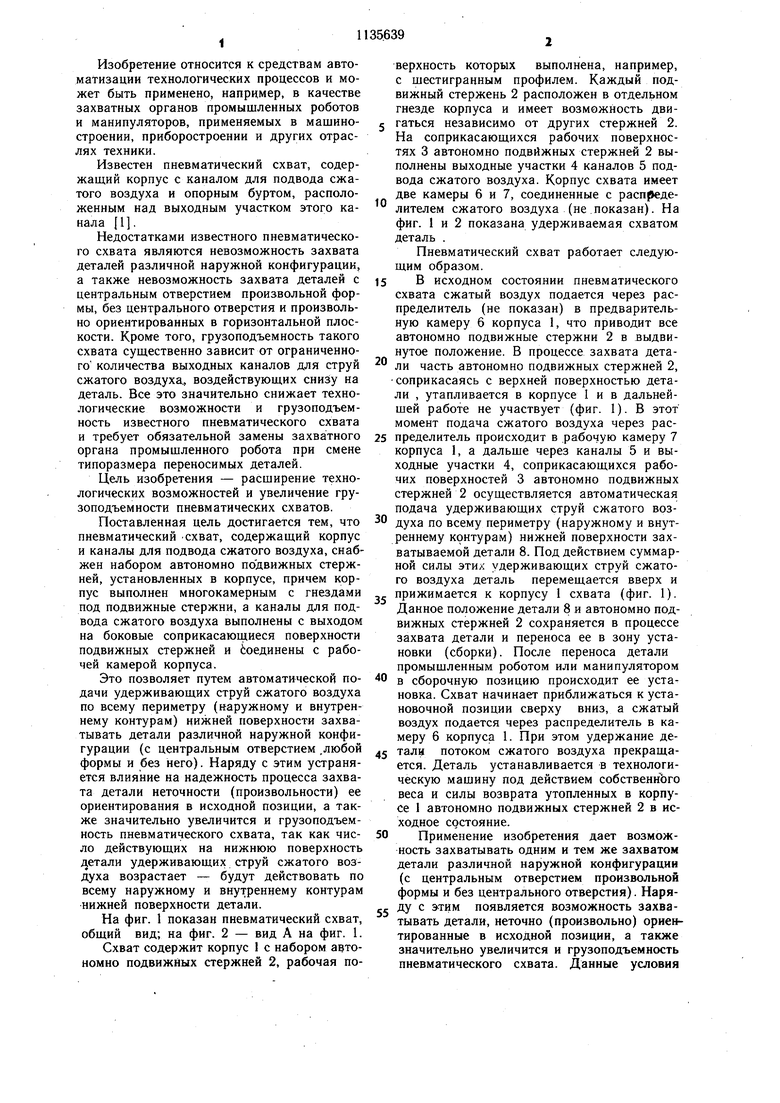
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический захват | 1983 |
|
SU1098793A1 |
| Пневматический захват | 1983 |
|
SU1117207A1 |
| Струйное захватное устройство | 1985 |
|
SU1310203A1 |
| Пневматический захват | 1984 |
|
SU1220796A1 |
| Пневматический схват | 1984 |
|
SU1249813A1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2002 |
|
RU2202466C1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2001 |
|
RU2199432C2 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2179504C1 |
| Пневматический захват | 1980 |
|
SU891431A1 |
ПНЕВМАТИЧЕСКИЙ СХВАТ, содержащий корпус и кацалы для подвода сжатого воздуха, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен набором автономно подвижных стержней, установленных в корпусе, причем корпус выполнен многокамерным с гнездами под подвижные стержни, а каналы для подвода сжатого воздуха выполнены с выходом на боковые соприкасающиеся поверхности подвижных стержней и соединены с рабочей камерой корпуса. СО сл о: со со
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневматический захват | 1973 |
|
SU447243A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
