Изобретение относится к самонастраивающимся системам управления и может быть использовано при автоматизации технологических процессов с нестационарным коэффициентом усиления объекта управления, такие объекты часто встречаются в энергетической, металлургической, химической и других отраслях промышленности.
Целью изобретения является повышение точности управления.
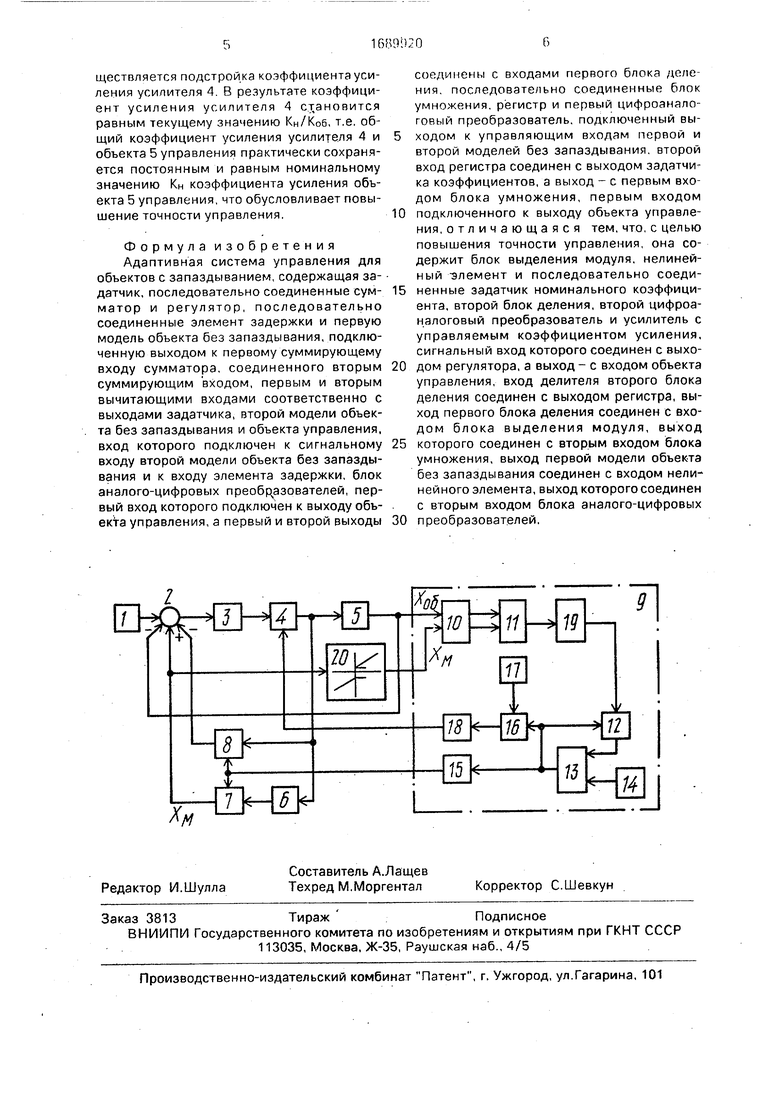
На чертеже изображена структурная схема предлагаемой системы.
Система содержит задатчик 1, сумматор 2, регулятор 3, усилитель 4 с управляемым коэффициентом усиления, объект 5 управления, элемент 6 задержки, первую 7 и вторую 8 модели объекта без запаздывания, блок 9 подстройки, блок 10 аналого-цифровых преобразователей, первый блок 11 деления, блок 12 умножения, регистр 13, задатчик 14
коэффициентов, первый цифроаналоговый преобразователь 15, второй блок 16 деления, задатчик 17 номинального коэффициента, второй цифроаналоговый преобразователь 18, блок 19 выделения модуля и нелинейный элемент 20. Элемент 6 задержки и первая модель 7 объекта без учета запаздывания образуют полную модель объекта управления. В качестве регистра 13 используется регистр адреса памяти с параллельным приемом и выдачей иформа- ции.
В основу адаптивной системы управления для объектов с запаздыванием положен принцип непрерывной адаптации коэффициентов усиления двух моделей объекта с запаздыванием и без запаздывания и коэффициента усиления регулятора по величине оценки коэффициента усиления объекта управления. При этом оценивание текущего
сл
С
о
00
ю ю
ю о
значения коэффициента усиления объекта осуществляется по алгоритму
Коб (ТО К„б (Ты) ITQ ш
-КнСГм)Ш,(D
«.ЛМ 1 | )
где Коб - оценка коэффициента усиления объекта управления;
Хоб - выходной сигнал объекта управления;
Хм - выходной сигнал полной модели;
Км - коэффициент усиления моделей объекта;
Т| и Тм - текущий (очередной) и предыдущий циклы адаптации, 1 1,2, 3,...
В основу адаптации общего коэффициента усиления регулятора положен принцип непрерывной подстройки коэффициента усиления усилителя 4 с управляемым коэффициентом усиления с целью компенсации изменений коэффициента усиления объекта управления, При этом подстройка коэффициента усиления усилителя 4 осуществляется по алгоритму
™-Ъ&Г) (2)
где Ку - коэффициент усиления усилителя 4;
Кн - номинальное значение коэффициента усиления объекта управления,
Таким образом, при адаптации по алгоритмам (1) и (2) общий коэффициент усиления усилителя 4 и объекта 5 управления практически сохраняется постоянным и равным номинальному значению коэффициента усиления объекта 5 управления. Подстройка коэффициента усиления усилителя 4 по алгоритму (2) позволяет компенсировать изменения коэффициента усиления объекта 5 управления (общий коэффициент усиления общего звена от выхода регулятора 3 до выхода объекта 5 практически сохраняется постоянным и равным номинальному значению).
Для того, чтобы блоки 11 и 16 деления не теряли работоспособности в случае, когда Хм (т.) 0, в систему включен нелинейный элемент 20. При уменьшении выходного сигнала Хм первой модели 7 объекта ниже установленного уровня Д выходной сигнал нелинейного элемента 20 имеет постоянную минимально допустимую величину. При этом ликвидируется возможность получения неопределенности блоками 11 и 16 деления.
До начала работы предлагаемой системы в регистр 13 блока 9 подстройки вводится код номинального значения (Кн) коэффициента усиления объекта 5 управления, который устанавливается задатчиком 14,
т.е. на выходе задатчика 14 имеется кодовая комбинация, соответствующая номинальному значению Кн коэффициент усиления объекта 5 управления.
Адаптивная система управления для
объектов с запаздыванием работает следующим образом.
В исходном положении в регистре 13 блока 9 подстройки находится код номинального значения коэффициента усиления объекта 5 управления. При этом на выходе второго блока 16 деления находится кодовая комбинация, равная единице, так как на выходе задатчика 17 находится также кодовая комбинация, равная номинальному значению Кн коэффициента усиления объекта 5 управления, В результате коэффициент усиления усилителя 4 устанавливается равным единице.
При изменении задания от задатчика 1 или при подаче единичного скачка система отрабатывает задание по трем контурам регулирования, Блок 10 аналого-цифровых преобразователей преобразует выходные
сигналы объекта 5 управления и первой модели 7 объекта с заданной частотой. Двоичные коды этих сигналов поступают в блок 11 деления, где вычисляется их отношение Хоб/Хм. Так как коэффициент усиления объектов управления всегда является положительной величиной, выходной цифровой сигнал блока 11 деления поступает на вход блока 19 выделения модуля, на выходе которого получается соотношение
| Хоб
I Хм
Выходной цифровой сигнал блока 19 выделения модуля поступает на первый вход блока 12 умножения, на второй вход
которого поступает выходной цифровой сигнал регистра 13. В блоке 12 умйожения производится вычисление текущего значения коэффициента усиления объекта 5 управления по формуле (1), На выходе блока 12
умножения получаем кодовую комбинацию, соответствующую новому (текущему) коэффициенту усиления объекта 5 управления КобСП).
Посредством первого цифроаналогового преобразователя 15 осуществляется подстройка коэффициентов усиления моделей 7 и 8. При этом устанавливается новое значение этих коэффициентов, рапное текущему значению коэффициента усиления объекта
5 управления, код которого находится в регистре 13.
Во втором блоке 16 деления вычисляется отношение Кн/Коб. Посредством второго цифроаналогового преобразователя 18 осуществляется подстройка коэффициента усиления усилителя 4 В результате коэффициент усиления усилителя 4 становится равным текущему значению Кн/К0б, т.е. общий коэффициент усиления усилителя 4 и объекта 5 управления практически сохраняется постоянным и равным номинальному значению Кн коэффициента усиления объекта 5 управления, что обусловливает повышение точности управления.
Формула изобретения Адаптивная система управления для объектов с запаздыванием, содержащая за- датчик, последовательно соединенные сумматор и регулятор, последовательно соединенные элемент задержки и первую модель объекта без запаздывания, подключенную выходом к первому суммирующему входу сумматора, соединенного вторым суммирующим входом, первым и вторым вычитающими входами соответственно с выходами задатчика, второй модели объекта без запаздывания и объекта управления, вход которого подключен к сигнальному входу второй модели объекта без запаздывания и к входу элемента задержки, блок аналого-цифровых преобразователей, первый вход которого подключен к выходу объекта управления, а первый и второй выходы
соединены с входами первого блока деле ния последовательно соединенные блок умножения, регистр и первый цифроанало- говый преобразователь, подключенный вы- ходом к управляющим входам первой и второй моделей без запаздывания, второй вход регистра соединен с выходом задатчика коэффициентов, а выход - с первым входом блока умножения, первым входом
подключенного к выходу объекта управления, отличающаяся тем. что, с целью повышения точности управления, она содержит блок выделения модуля, нелинейный -элемент и последовательно соединенные задатчик номинального коэффициента, второй блок деления, второй цифроа- налоговый преобразователь и усилитель с управляемым коэффициентом усиления, сигнальный вход которого соединен с выходом регулятора, а выход - с входом объекта управления, вход делителя второго блока деления соединен с выходом регистра, выход первого блока деления соединен с входом блока выделения модуля, выход
которого соединен с вторым входом блока умножения, выход первой модели объекта без запаздывания соединен с входом нелинейного элемента, выход которого соединен с вторым входом блока аналого-цифровых
преобразователей.

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления для объектов с запаздыванием | 1980 |
|
SU1015336A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| Адаптивная система управления для объектов с запаздыванием | 1983 |
|
SU1161917A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
Изобретение относится к самонастраивающимся системам управления и может быть использовано для автоматизации технологических процессов с изменяющимся коэффициентом усиления объекта управления. Такие объекты часто встречаются в энергетической, химической и других отраслях промышленности. Целью изобретения является повышение точности управления. Цель достигается тем, что система дополнительно содержит блок выделения модуля, нелинейный элемент, последовательно соединенные задатчик номинального коэффи: циента, второй блок деления, второй цифроаналоговый преобразователь и усилитель с управляемым коэффициентом усиления. 1 ил.
| Система управления для объектов с запаздыванием | 1977 |
|
SU648947A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
