.113
. Изобретение относится к электротехнике, а именно к управляемому электроприводу переменного тока, и может быть использовано, в частности при создании низкоскоростных следящи систем на основе двигателей двойного питания,
Целью изобретения является повышение точности регулирования.
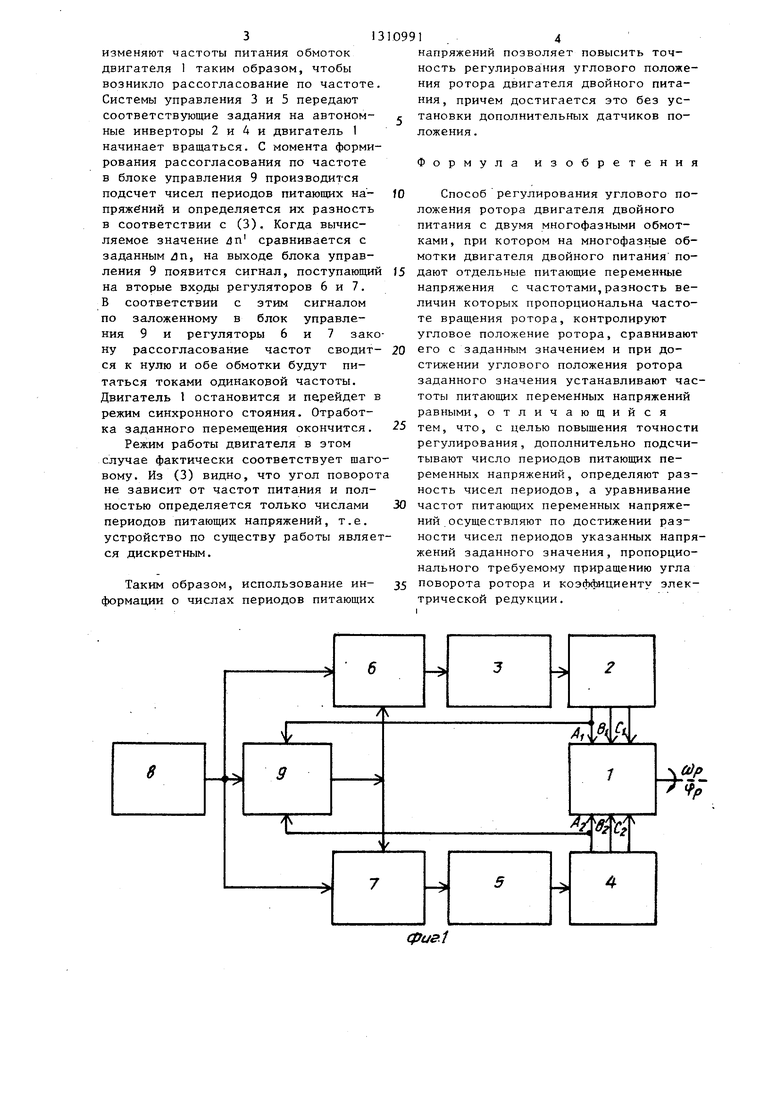
На фиг.1 представлена функциональная схема устройства, реализующего предлагаемый способ ; на фиг,2 - диаграмма, поясняющая способ,
Устройс 1 во, реализующее способ регулирования углового положения ротора двигателя 1 двойного питания (фиг.1) с двумя трехфазными обмотками А В С и , С, расположенными на статоре, и зубчатым ротором, содержит автономный инвертор 2 с системой управления 3 на входе, подключенный к трехфазной обмотке А ,и автономный инвертор 4 с систе- .мой управления 5 на входе,подключенный к трехфазной обмотке А2,В2С2.. Входа систем управления 3 и 5 подключены к выходам регуляторов 6 и 7 соответственно. Блок задания 8 подключен выходом к первым входам регуляторов 6,7 и к первому входу блока управления 9 , второй и третий входы которого соединены соответственно с одним из фазных выходов автономного инвертора 2 (фаза А) и автономного инвертора 3 (фаза А,,). Выход блока управления 9 подключен к вторым входам регуляторов 6 и 7.
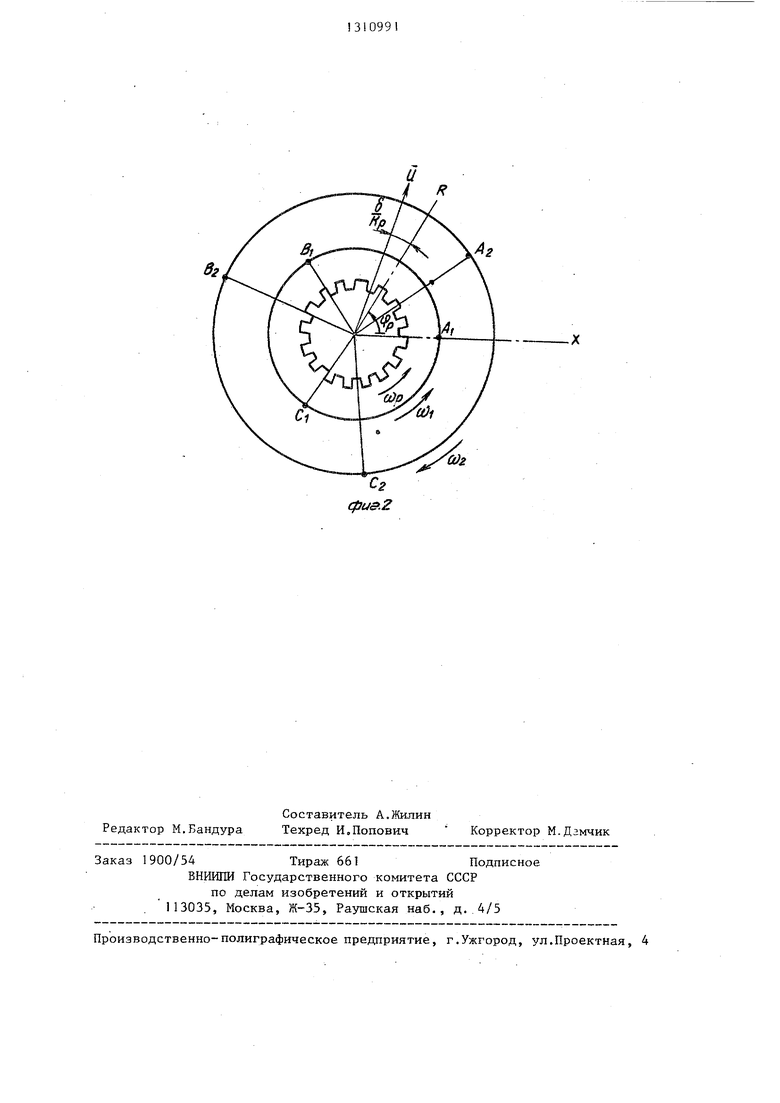
Па диаграмме (фиг.2) представлено взаимное расположение трехфазных обмоток и на статоре. Все углы измеряются относительно оси X, связанной со статором, против направления вращения .часовой стрелки Ось R жестко связана с ротором, и за угол поворота принимается угол между осями R и X. Ротор вращается вместе с обобщенным вектором напряжения U со скоростью, определяемой для установившегося режима по формуле
U,- W1
Р
(1)
г де Юр LOj- угловые частоты напряжений питания соответственно первой и второй обмоток;
Кр - коэффициент электрической редукции, равный для индукторного двигателя двойного питания числу зубцов ротора, а для двигателя двой12
ного питания на базе асинхронного двигателя с фазным ротором - числу пар полюсов.
Угол (/ - электрический угол нагрузки двигателя двойного питания, определяемый различием в угловом положении обобщенного вектора напряже- нуя и ротора двигателя, вызываемым нагрузкой. В общем случае имеем
dt Кр p ( (2)
Из (2) получаем it
сГ К tOpdt -|(u)i-U)2)dt
- L/po-2jr(--- - (fp
+ 1Гро- 2)Г(п,-Пг)-(„, где t/pp.- начапьный угол поворота ротора; - приращение угла поворота
ротора; Ч д - начальная фаза питающего на
пряжения;
Т, Тр - периоды питающих напряжений ;
п,п 2 - числа соответствующих периодов за время t.
Tax как Ц р. , то из (2) получаем
2 (п,-п,).
(3)
Отсюда следует, что приращение угла поворота пропорционально разности чисел периодов, подсчитанных за время регулирования, и обратно пропорционально коэффициенту электрической редукции. Поэтому разность чисел периодов зависит от заданного приращения угла следующим образом:
йп П2 , (4)
Для отработки перемещения на угол d 1/р в соответствии со способом опре- деляютлп с учетом зависимости (4), задают рассогласование по частоте между напряжениями питания обмоток, подсчитывают п, и п и определяют текущее значениейп П -nj.. После до
стижения лп-лп частоты питания устанавливают одинаковыми .К этомумоменту ротор двигателя повернется на угол .
Устройство, реализующее способ управления, работает следующим об- разом.
С блока задания 8 (фиг.1) поступает сигнал, определяющий требуемое перемещение ротора. В соответствии с этим сигналом регуляторы 6 и 7
313
изменяют частоты питания обмоток двигателя 1 таким образом, чтобы возникло рассогласование по частоте. Системы управления 3 и 5 передают соответствующие задания на автоном- ные инверторы 2 и 4 и двигатель 1 начинает вращаться. С момента формирования рассогласования по частоте в блоке управления 9 производится подсчет чисел периодов питающих напряжений и определяется их разность в соответствии с (3). Когда вычисляемое значение лп сравнивается с заданным jn, на выходе блока управления 9 появится сигнал, поступающий на вторые входы регуляторов 6 и 7. В соответствии с этим сигналом по заложенному в блок управления 9 и регуляторы 6 и 7 зако ну рассогласование частот сводится к нулю и обе обмотки будут питаться токами одинаковой частоты. Двигатель 1 остановится и перейдет в режим синхронного стояния. Отработка заданного перемещения окончится.
Режим работы двигателя в этом случае фактически соответствует шаговому. Из (3) видно, что угол поворот не зависит от частот питания и полностью определяется только числами периодов питающих напряжений, т.е. устройство по существу работы является дискретным.
Таким образом, использование информации о числах периодов питающих
1 .4
напряжений позволяет повысить точность регулирования углового положения ротора двигателя двойного питания, причем достигается это без установки дополнительных датчиков положения .
Формула изобретения
Способ регулирования углового положения ротора двигателя двойного питания с двумя многофазными обмотками, при котором на многофазные обмотки двигателя двойного питания подают отдельные питающие переменные напряжения с частотами,разность величин которь х пропорциональна частоте вращения ротора, контролируют угловое положение ротора, сравнивают его с заданным значением и при достижении углового положения ротора заданного значения устанавливают частоты питающих переменных напряжений равными, отличающийся тем, что, с целью повышения точности регулирования, дополнительно подсчитывают число периодов питающих переменных напряжений, определяют разность чисел периодов, а уравнивание частот питающих переменных напряжений осуществляют по достижении разности чисел периодов указанных напряжений заданного значения, пропорционального требуемому приращению угла поворота ротора и коэффициенту электрической редукции.
фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1541752A1 |
| Способ управления двигателем двойного питания | 1987 |
|
SU1515326A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1986 |
|
SU1372582A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА | 2021 |
|
RU2775819C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2019 |
|
RU2760393C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ С ФАЗНЫМ РОТОРОМ | 2023 |
|
RU2821722C1 |
| Способ управления многофазным электродвигателем | 1977 |
|
SU736329A1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
Изобретение относится к электро- .технике и может быть использовано при создании низкоскоростных следящих систем на основе двигателей двойного питания. Целью изобретения является повышение точности регулирования. Способ регулирования углового положения ротора двигателя двойного питания с двумя многофазными обмотками заключается в том, что на обмотки в Начальный момент регулирования подают напряжения, разность между которыми пропорциональна частоте вращения , контролируют угловое положение ротора, дополнительно подсчитывают число периодов питающих переменных напряжений, определяют разность чисел периодов и при достижении углового положения ротора и разности чисел периодов заданных значений устанавливают частоты переменных питающих напряжений равными. 2 ил. (Л со со
Редактор М,Бандура
Составитель А.Жилин Техред И.Попович
Заказ 1900/54Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор М.Дгмчик
| Онищенко Г.В., Локтева И.Л | |||
| Асинхронные вентильные каскады и двигатели двойного питания, М.: Энергия, 1979, с.15-20 | |||
| Электропривод | 1983 |
|
SU1100702A2 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
