(61) 1372582
(21)4229541/24-07
(22)13.04.87
(46) 07.11.88.БГОЛ. № 41
(71)Красноярский политехнический институт
(72)С.А.Бронов и В.В.Балабаев
(53)621.316.718 (088.8)
(56)Авторское свидетельство СССР № 1372582, кл. Н 02 Р 7/46, 1986.
(54)СПОСОБ РЕГУЛИРОВАНИЯ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ
(57)Изобретение относится к электро технике. Цель изобретения-повьшение устойчивости двигателя двойного пита ния в переходных режимах путем контроля величины приращения фазового сдвига между напряжениями, питающими обмотки двигателя. Способ регулирова
ния углового положения ротора двигателя двойного питания заключается в том, что блоком 10 аадают требуемый угол поворота ротора двигателя 1 двойного питания, а блоком 7 - первое элементарное приращение фазового сдвига, измеряют датчиком 8 положение ротора двигателя и устанавливают факт достижения ротором заданного приращения фазового сдвига. Вновь задают элементарное прираще-. ние фазового двигателя и повторяют вьшеперечисленные операции. Такое регулирование угла поворота ротора малыми порциями обеспечивает устойчивую работу двигателя двойного пита- о ния при любом требуемом угле поворота, т.к. угол нагрузки никогда не превьшает максимально допустимого значения. 2 з.п. ф-лы, 1 ил.
(/}
С
1
Изобретение относится к электротехнике, может быть использовано при создании низкоскоростных следящих систем переменного тока с исполнительным двигателем двойного питания и является усовершенствованием способа по авт . св. N- 1372582.
ель изобретения - повьшенне усточивости двигателя двойного питания в переходных режимах путем контроля величины приращения фазового сдвига между напряжениями, питающими обмотки двигателя.
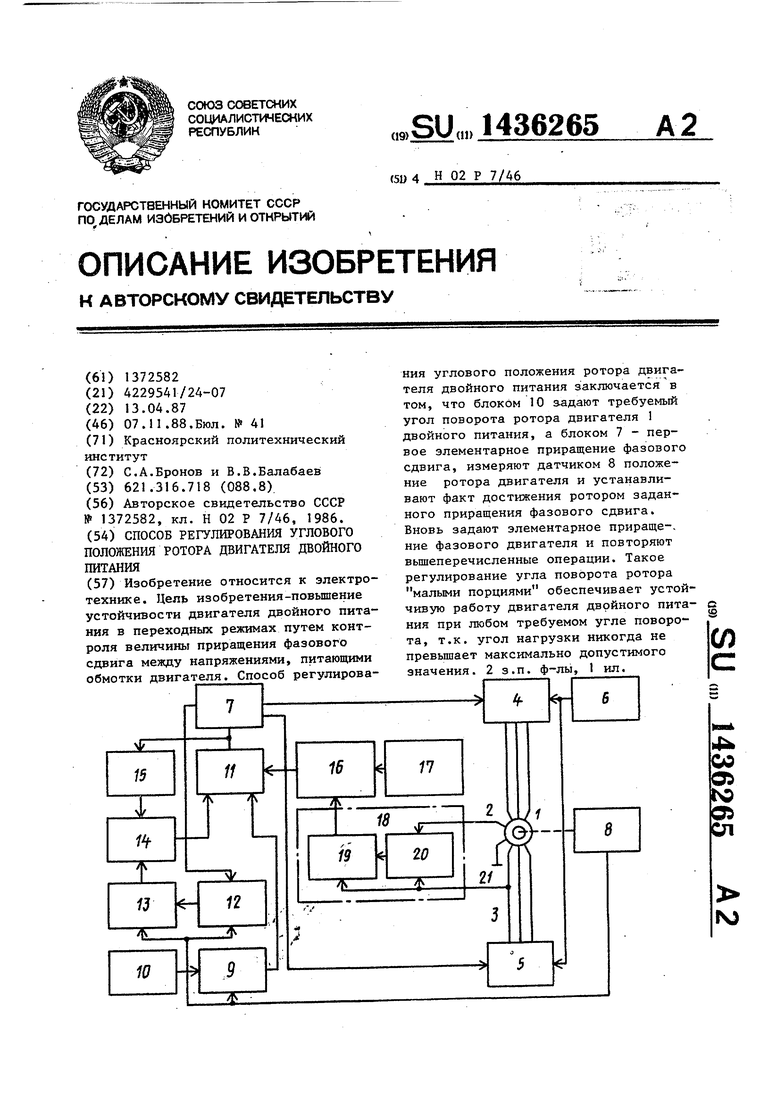
На чертеже представлена функциональная схема электропривода, реа- лиззпощего указанный способ.для индукторного двигателя двойного пит.а- ння.
Регулирование угла поворота ротора двигателя двойного питания осуществляют следующим образом.
Двигатель двойного питания имеет первую и вторую многофазные обмотки. Например, у двигателя .двойного питания на основе асинхронного двигателя с фазньм ротором первой обмоткой является обмотка статора, а второй - обмотка ротора, У индукторного двигателя двойного питания обе обмотки расположены на статоре. Первую и вторую многофазные обмотки двигателя двойного питания запитьшают от отдельных источников питания (инверторов) соответственно первым и вторым питающим напряжениями. Первые гармо ники обоих питающих напряжений имеют в точности одинаковую частоту, чт легко может быть обеспечено синхронизацией работы инверторов от одного задающего генератора. Питающие напряжения представляют собой последовательность тактовых импульсов, широт- но модулированных или амплитудно
1436265
W первых гармоник, питающих напряжений дифференциальным уравнением:
d
.«. 5
dt
KpWp- (), (2)
5
0
где uip - угловая скорость ротора
двигателя двойного питания; О) - угловые частоты первых гармоник соответственно первого и второго питающирс напряжений;
Кр - коэффициент электрической редукции (для двигателя питания на основе асинхронного двигателя с фазным ротором Кр равен числу пар полюсов, а ДД1Я индукторного двигателя двойного питания - числу зубцов ротора) .
Интегрируя выражение (2), можно получить уравнение для угла нагрузки
25 КрЦр- (i|,-q,j) KpVp-d(/,(3)
0
5
0
где tfp - угол поворота ротора двигателя двойного питания; if и t/д - текущие значения фаз первых гармоник соответственно первого и второго питающих напряжения;
. Д1 - фазовьп сдвиг между питающими напряжениями. При изменении фазового сдвига (путем изменения фазы одного из питающих напряжений или обоих одновременно) угол поворота ротора tfp в силу инерционности в первый момент останется неизменным. Поэтому в соответствии с (3) угол нагрузки с изменится также мгновенно и на такую же ве.- личину, что и фазовый сдвиг ,Л(/. Сра после этого начнется постепенное из
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1541752A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1986 |
|
SU1372582A1 |
| Способ управления двигателем двойного питания | 1987 |
|
SU1515326A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1985 |
|
SU1310991A1 |
| Способ управления синхронным электродвигателем | 2019 |
|
RU2724603C1 |
| Двухзонный вентильный электродвигатель | 1978 |
|
SU782069A1 |
| Электропривод | 1986 |
|
SU1385217A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2076450C1 |
| Двухзонный вентильный электродвигатель | 1982 |
|
SU1073851A1 |
модулированных по синусоидальному за- 45 менение углового положения ротора такону.
Угол нагрузки двигателя двойного питания, определяющий устойчивость двигателя двойного питания, должен находиться в диапазоне
-90 : «Г -1-90
(1)
где cf - угол нагрузки.
В случае нарушения условия (1) двигатель двойного питания выпадает из синхронизма, теряет устойчивость и становится неуправляемым. Угол нагрузки связан с угловыми частота0
ким образом, что через некоторое время за счет изменения величина угла нагрузки с/ станет равной начальному значению угла нагрузки (если статический момент на валу двигателя двойного Питания остался прежним) . Ротор двигателя двойного питания повернется на угол, пропорциональный изменению фазового сдвига йЦ и, g обратно пропорциональный коэффициенту электрической редукции Кр,и остановится.
Таким образом, при неизменном статическом моменте на валу двигателя
двойного питания конечное значение угла нагрузки всегда равно начальному значению угла нагрузки. Однако в процессе регулирования угол нагрузки обязательно изменяется, причем в первый момент регулирования измене- ние угла нагрузки происходит мгновенно (безынерционно).
Если фазовый сдвиг Ц изменяется так, что первое после начала регулирования значение угла нагрузки оказы вается в диапазоне значений, опреде-. ляемом выражением (1), то регулирование происходит нормально. Если же фазовый сдвиг /5 if получит слишком большое приращение и условие () не выполнится хоть на MrHOBeiiiiCj то двигатель двойного литаяггя льшадет из синхронизма, потеряет устойчивость и станет неуправляем -, Величина . денной составляющей угловой скорости ротора двигателя двойного питания определяется выражением, которое получают из выражения (2) с учетом того, что для вынужденного процесса производная от угла нагрузкр равна нулю.
)
- -,
сог()
W
где ои и
ы„ - угловые частоты первых
гармоник соответственно первого и второго питающих напряжений. Так как частоты первых гармоник, питающих напряжений одинаковы, т.е. . ы w, то ротор двигателя неподвижен (режим синхронного дтояния). Выражение для угла поворота получается из (3) :
Lfp(t) (t) +-3l|)(t). (5)Из выражения (5) следует, что при постоянной величине фазового сдвига
dq (t) const
угол поворота ротора также постоянен tfpCt) const, если момент статический на валу двигателя двойного питания остается постоянным (т.е. если постоянен угол нагрузки J). Для поворота ротора двигателя двойного питания изменяют фазовый сдвиг пропорционально требуемому углу поворота ротора и обратно пропорционально коэффициенту электрической редукции
-JQ-. 152025
30
35
40
45
50
55
К р. Изменение фазового сдвига означает разовое (на одном периоде питающих напряжений) изменение частот пи-. тающих напряжений, что приводит к появлению импульса вращающего момента и повороту ротора двигателя. Перед началом и после окончания изменения фазового сдвига двигатель двойного питания находится в режиме ронного стояния,, что позволяет надежно фиксировать положение ротора двигателя. В целом режим работы двигателя двойного питания напоминает режим работы шагового двигателя.
В двигателе двойного питания регулируемыми величинами являются не только параметры врацепия ротора (угловая стчорость V угол поворота ротор-з ) г но и угол нагрузки с/ , который определяет устойчивость дв11гателя двойного питания во всех режимах. Для устойчивой работы двигателя двойного питания мгновенное значение угла нагрузки должно всегда находиться в пределах, определяемых зыраженмем (1).
Особенностью регулирования угла поворота ротора из eнeннeм фазового сдвига меж,цу питающими напря кен1- ями является то, что угол нагрузки в этом случае изменяется мгновенно (без задержки) на величину, прирашеншо фазового сдвига. Поэтому введение различнЕлх обратнБгх связей I(в том числе и по углу нагрузки) для предотвращения чрезмерного увеличения угла нагрузки (т.е. регулирование по (Замкнутому контуру) не гарантирует удержание двигателя двойного питания в синхронизме в первый момент задания Приращения ф.азового сдвига, так. как изменение угла нагрузки безынерционно, а датчики в цепях обратных связей обязательно обладают некоторой ;инерционностью.
Чтобы надежно гарантировать выполнение условия (1), необходимо ограни - чить величину приращения фазового сдвига, что и предусматривается изоб- |ретением.
Когда требуемый угол поворота ротора мал и соответствующее ему приращение фазового сдвига при скачкообразном задании не может вьгоести двигатель двойного питания из синхронизма, регулирование угла поворота двигателя двойного питания может осуществляться согласно известному.способу. Однако такая ситуация встречается редко. Полное приращение фазового сдвиг соответствзтнцее требуемому углу поворота ротора, оказывается слишком бол шим и при задании такого приращения .фазового сдвига двигатель двойного - питания может вьтасть из синхронизма, потерять устойчивость и стать яеулравляемьм, Для предотвращения все приращение фазового сдви- га, соотвётств тощее требуемому углу поворота (и равное углу поворота, умноженному на коэффициент электрической редукции Кр), делят на ряд элементарных приращений,- причем ве- личину элементарных приращений выбирают такой, чтобы при задании.одного элементарного приращения фазового сдвига угол нагрузки остав ался в диапазоне значений, определяемом выражением (I).
.Для поворота ротора двигателя двойного питания на требуемьш угол . задают последовательно один за другим элементари{ле приращения фазового сдвига, но не непрерьтно,а с пауза- ШЕ. После задания очередного элементарного приращения фазового сдвига вьг-1исля1от5 на какой угол должен повернуться ротор двигателя двойного пита- ыия под действием заданного элементарного приращения фазового сдвига (т.е. вычисляют велшшну заданного шага поворота ротора), .
Ротор двигателя двойного питания
начинает перемещаться в результате переходного процесса. Это перемеще- ние ротора контролируют с помощью соответствующего датчш а (датчика угла поворота) и когда ротор повернется на угол, равный тому ух лу, который соответствует заданному приращешво фазо.вого сдвига (т,е, когда действительная величина шага поворота- рото- ра станет равной величине заданного шага поворота ротора), задают следующее элементарное приращение фазового сдвига.
Таким образом, поворот ротора двигателя двойного питания на требуемый угол осуществляется не сразу, а малыми дозами (шагами) с контролем отработки каждого шага. Угол на1 рузки в в таком режиме изменяется на каж
дом шаге от своего начального значения до некоторого максимального (меньшего максимально допустимого) и вновь до начального значения (если
, с Ю з 20
25 ЗО5
. 0 5 р
5
остается постоянным статический момент на валу двигателя).
Предлагаемьй способ фактически реализует задатчик интенсивности изменения фазового сдвига, который вьтол- няет функции регулятора скорости, причем этот задатчик интенсивности является адаптивным, так как темп задания отработки определяется им автоматически в зависимости от инерционности двигателя двойного питания (или инерционности всего электропривода) о Скорость перемещения ротора на требуемый угол оказывается максимально возможной с учетом вьтолнения условия нахождения значения угла нагрузки в некотором диапазоне. Одна из границ этого диапазона - величина рабочего угла нагрузки, вторая граница - заданное макскмально допустимое значение угла нагрузки. Адаптивность задания темпа отработки заданного перемещения проявляется в том, что на работу электропривода слабо влияет изменение инерционности электропривода (с точки зрения удержания двигателя в синхронизме), так как при изменении инерционности электропривода соответствующим образом меняется темп отработки .заданного перемещения,
I
-Выбор величины элементарных приращений фазового сдвига можно производить различным образом. S простейшем случае величина каждого элементарного приращения фазового сдвига выбирается постоянной в зависимости от рабочего угла .нагрузки (40-50 ) и максимально допустимого угла нагрузки (60-70). Для фиксированной вели-.: чины элементарного приращения сдвига величина заданного шага поворота ротора также фиксирована и равна /IM /Kp, т.е. ее не нужно вычислять каждый раз после задания очередного элементарного приращения фазового сдвига. Величины элементарных приращений фазового сдвига и заданного тага поворота ротора могут быть заложены в систему управления электропривода заранее. При- задании требуемого уг- ла поворота ротора система управления электропривода задает элементарные приращения фазового сдвига в соответствии с предлагаемым способом до тех пор, пока действительный угол поворота ротора не станет равен требуемому (пока двигатель не отработает все требуемое перемещение ротора).
В случае изменения момента статического на валу двигателя двойного ..
ь питания возможно изменение рабочего
угла нагрузки. В этом случае величину элементарного приращения фазового сдвига также целесообразно сделать переменной и зависящей от текущего ю значения угла нагрузки. Для этого предусмотрен контроль текзщего значения угла нагрузки и определение запаса по углу нагрузки (разности между максимально допустимым углом нагруз- 15 ки и текущим углом нагрузки).
В момент задания очередного элементарного приращения фазового сдвига величина этого элементарного приращен ния берется равной тому запасу по- 20 углу нагрузки, который был на момент задания данного элементарного приращения фазового сдвига. Такой алгоритм : регулирования гарантирует устойчивость работы двигателя двойного 25 питания даже при переменном статическом моменте на валу двигателя двойного питания.
В большинстве случаев питание исполнительных двигателей двойного 30 питания осуществляется от инверторов с широтно-импульсной или амплитудно-импульсной модуляцией питающих напряжений. В этом случае изменение фазового сдвига происходит дискретно, 5 через интервалы, кратные фазовой дискрете, которая зависит от числа тактовых импульсов в периоде первой гармоники питающих напряжений.
Предусмотрена возможность задания 40 элементарно го приращения фазового .сдвига с величиной, равной одной фазовой дискрете. Такое регулированиеj обеспечивает режим работы двигателя двойного питания, близкий к шагово- 45 му. Величина элементарного приращения фазового сдвига в этом случае остается постоянной и достаточно, малой при лфбой величине требуемого угла поворота. Реализация такого управле- 50 ния оказьшается наиболее простой.
Электропривод, реализующий способ регулирования угла поворота двигателя двойного питания (в данном случае
ход блока 6 задания частоты питающи напряжений подключен к входам регулировки частоты инверторов 4 и 5. Первый выход блока 7 задания фазово го сдвига подключен к входу регулировки фазы инвертора 4, а второй вы ход блока 7 задания фазового сдвига к входу регулировки фазы инвертора Датчик 8 угла поворота механически связан с ротором двигателя 1 двойн го питания, Выход датчика 8 угла п ворота подключен к первому входу п
вого блока 9 сравнения, к второму ду которого подключен выход блока задания угла поворота. Выход перво блока 9 сравнения соединен с первы входом регулятора 11 фазового сдви Выход датчика 8 угла поворота подк чен также к информационному входу блока 12 памяти и первому входу вт го блока 13 сравнения, к второму в ду которого подключен выход блока памяти, К входу записи блока 12 па ти подключен третий выход блока 7 дания фазового сдвига. Выход второ блока 13 сравнения соединен с перв входом блока 14 -сравнения, с вторым входом которого соединен выход бло 15 вычисления заданного шага. Выход третьего блока 14 сравнения подклю к второму входу регулятора 11 фазо го сдвига, выход которого соединен входом блока 7 задания фазового сдв га, а также с входом блока 15 вычи ления заданного шага. К третьему входу регулятора 11 фазового сдвиг подключен выход блока 16 вычисления элементарного приращения фазово сдвига. К первому входу блока 16 вы числения элементарного приращения ф зового сдвига подсоединен выход бло ка 17 задания максимального угла н рузки, а к второму ВХОДУ - выход да чика 18 угла нагрузки, включающего фазовый детектор 19, выход которого является выходом датчика 18 угла н рузки, и сумматор 20, выход которого подключен к первому входу фазово го детектора 19. Первый вход сумма ра 20 соединен с вькодом сигнальной обмотки 21 двигателя 1 двойного питания. Одна из фаз второй обмотки 3 подключена к вторым входам сумматор
индукторного двигателя двойного пита- 55 0 и фазового детектора 19. ния), содержит двигатель 1 двойного Блок 6 задания частоты питающих питания, у которого первая 2 и вторая 3 обмотки подключены к выходам соответственно инверторов 4 и 5. Вынапряжений представляет собой генератор прямоугольных или синусоидаль ных импульсов. Датчик 8 угла поворо
ход блока 6 задания частоты питающих напряжений подключен к входам регулировки частоты инверторов 4 и 5. Первый выход блока 7 задания фазового сдвига подключен к входу регулировки фазы инвертора 4, а второй выход блока 7 задания фазового сдвига - к входу регулировки фазы инвертора 5. Датчик 8 угла поворота механически связан с ротором двигателя 1 двойного питания, Выход датчика 8 угла поворота подключен к первому входу первого блока 9 сравнения, к второму входу которого подключен выход блока 10 задания угла поворота. Выход первого блока 9 сравнения соединен с первым входом регулятора 11 фазового сдвига. Выход датчика 8 угла поворота подключен также к информационному входу блока 12 памяти и первому входу второго блока 13 сравнения, к второму входу которого подключен выход блока 12 памяти, К входу записи блока 12 памяти подключен третий выход блока 7 задания фазового сдвига. Выход второго блока 13 сравнения соединен с первым входом блока 14 -сравнения, с вторым входом которого соединен выход блока 15 вычисления заданного шага. Выход третьего блока 14 сравнения подключен к второму входу регулятора 11 фазового сдвига, выход которого соединен с входом блока 7 задания фазового сдвига, а также с входом блока 15 вычис-: ления заданного шага. К третьему входу регулятора 11 фазового сдвига подключен выход блока 16 вычисления элементарного приращения фазового сдвига. К первому входу блока 16 вычисления элементарного приращения фазового сдвига подсоединен выход блока 17 задания максимального угла нагрузки, а к второму ВХОДУ - выход датчика 18 угла нагрузки, включающего фазовый детектор 19, выход которого является выходом датчика 18 угла нагрузки, и сумматор 20, выход которого подключен к первому входу фазового детектора 19. Первый вход сумматора 20 соединен с вькодом сигнальной обмотки 21 двигателя 1 двойного питания. Одна из фаз второй обмотки 3 подключена к вторым входам сумматора
0 и фазового детектора 19. Блок 6 задания частоты питающих
напряжений представляет собой генератор прямоугольных или синусоидальных импульсов. Датчик 8 угла поворо10
t5
25
91436265
та может быть серийным кодовым датчиком с выходным сигналом в виде параллельного кода, соответствующего текущему углу поворота ротора (в случае цифровой системы управления электропривода) или синусно-косинусным вращающимся трансформатором (в случае аналоговой системы управления электропривода).
В качестве блока IО задания угла поворота может использоваться вычис- лительная машина более высокого уровня управления с цифровым выходом (для цифрового варианта электропривода) или снабженная цифроаналоговым преобразователем на выходе (для аналогового варианта электропривода). Блоки 9, 3 и 14 сравнения могут быть выполнены на основе цифровых суммато- 20 ров (для цифрового варианта электропривода) или аналоговых компараторов (для аналогового варианта электропривода) .
Блок 12 памяти вьшолняется на базе микросхем оперативных запоминающих устройств (для цифрового варианта электропривода)или на основе аналоговых: запоминающих устройств с запоми- наюшлми конденсаторами и операционными усилителями по известным схемам. Регулятор 1I фазового сдвига является по своим функциям цифровым или аналоговым коммутатором со схемой совпадения на входе (логическими входами схемы совпадения являются входы первый и второй, а информационным, сигнал с которого коммутируется на выход, является третий вход, соединеиньй с выходом блока 16 вьг-1исления элементарного приращения фазового сдвига),
Блок 15 вычисления заданного шага осуществляет операцию деления входного сигнала на постоянный коэффициент, равный коэффициенту электрической редукции Кр. Поэтому в аналоговом варианте электропривода блок 15 вычисления заданного шага вьшолняется в виде резисторного делителя найря- жения или масштабного усилителя с коэффициентом передачи, равным 1/Кр .
В цифровом варианте электропривода возможно построение блока 15 вычис10
риант датчика с использованием сигнальной обмотки, размещенной в пазах второй обмотки 3 двигателя 1 двойно- го питания,
Инверторы 4 и 5 могут выполняться при щиротно-импульсной модуляции питающих напряжений по широко распространенным мостовым схемам, а при амп- Литудно-импульсной модуляции питающих напряжений, например, по известной схеме - с выходным трансформатором, имеющим отводы у первичной обмотки, коммутируемые силовыми транзисторными кхпочами. Эти инверторы должны иметь системы управления, обеспечивающие возможность регулировки фазы питающих напряжений.
Электропрршод работает следующим образом.
Блок 6 задания частоты питающих 1- апряжений обеспечивает задание.одинаковых частот первых гармоник питающих напряжений, получаемых от инверторов 4 и 5. Поэтому при отсутствии регулирования двигатель 1 двойного питания находится в режиме синхронного стояния и его ротор неподвижен. При необходимости повернуть ротор двигателя на некоторый угол блок
10задания угла поворота формирует на своем выходе сигнал, пропорциональный- требуемому углу поворота. Этот |Сигнал сравнивается с помощью первого блока 9 сравнения с действительным углом поворота, значение которого определяется с помощью датчика 8 угла поворота.
В результате сравнения.вырабатьгоа- ется сигнал рассогласования, который поступает на первый вход регулятора
11фазового сдвига и разрешает начало регулирования (этот сигнал рассогла- сования с выхода блока 9 сравнения
45 может представлять собой, например, логический сигнал, несущий информа цию о наличии и знаке рассогласования) . С помощью датчика 18 угла нагрузки измеряется текущее (рабочее) значение угла нагрузки, задаваемым с помощью блока 17 задания максимального угла нагрузки. Результат сравнения определяется блоком 16 в згчис- ления элементарного приращения фазо30
35
40
50
ления заданного шага с помощью регист-55 сдвига и представляет собой наи- ров сдвига. Датчик 18 угла нагрузки большую из возможных (с точки зрения может вьшолняться по различным изве- .сохранения устойчивости) величину стным схемам. В рассматриваемом вари- элементарного приращения фазового анте электропривода используется на- сдвига, при которой двигатель двойно10
t5
25
36265
0
10
риант датчика с использованием сигнальной обмотки, размещенной в пазах второй обмотки 3 двигателя 1 двойно- го питания,
Инверторы 4 и 5 могут выполняться при щиротно-импульсной модуляции питающих напряжений по широко распространенным мостовым схемам, а при амп- Литудно-импульсной модуляции питающих напряжений, например, по известной схеме - с выходным трансформатором, имеющим отводы у первичной обмотки, коммутируемые силовыми транзисторными кхпочами. Эти инверторы должны иметь системы управления, обеспечивающие возможность регулировки фазы питающих напряжений.
Электропрршод работает следующим образом.
Блок 6 задания частоты питающих 1- апряжений обеспечивает задание.одинаковых частот первых гармоник питающих напряжений, получаемых от инверторов 4 и 5. Поэтому при отсутствии регулирования двигатель 1 двойного питания находится в режиме синхронного стояния и его ротор неподвижен. При необходимости повернуть ротор двигателя на некоторый угол блок
10задания угла поворота формирует на своем выходе сигнал, пропорциональный- требуемому углу поворота. Этот |Сигнал сравнивается с помощью первого блока 9 сравнения с действительным углом поворота, значение которого определяется с помощью датчика 8 угла поворота.
В результате сравнения.вырабатьгоа- ется сигнал рассогласования, который поступает на первый вход регулятора
11фазового сдвига и разрешает начало регулирования (этот сигнал рассогла- сования с выхода блока 9 сравнения
5 может представлять собой, например, логический сигнал, несущий информа цию о наличии и знаке рассогласования) . С помощью датчика 18 угла нагрузки измеряется текущее (рабочее) значение угла нагрузки, задаваемым с помощью блока 17 задания максимального угла нагрузки. Результат сравнения определяется блоком 16 в згчис- ления элементарного приращения фазо30
35
0
0
o питания еще остается в синхронизме.
Регулятор I1 фазового сдвига задает первое I элементарное приращение фазового сдвига, равное (или меньшее) величине, вычисленной блоком 16 вычисления элементарного приращения фазового сдвига. Блок 7 задания фазового сдвига формирует сигналы на изменение фаз первых гармоник питающих напряжений для инверторов 4 и 5. Сигналы на изменение фаз формируются в зависимости от знака требуемого угла
.поворота. Блок 15 вычисления заданно 15 ротора не станет равен требуемому угго шага определяет величину шага по- ворота ротора, на который должен переместиться ротор двигателя при заданном элементарном приращении фазового сдвига.20
Далее задачей системы управления электроприводом является определение момента, когда двигатель двойного питания полностью отработает заданный ааг поворота, чтобы задать следующее 25 элементарное приращение фазового сдвига. Эта задача решается путем вычисления действительного шага поворота рот тора и сравнения-его с заданным. Для этого по сигналу с третьего выхода зо блока 7 задания фазового сдвига в блок 12 памяти записьшается начальное (на момент начала регулирования) значение угла поворота ротора. Второй блок 13 сравнения определяет разность между текущим значением угла поворота ротора, который начинает изменяться под воздействием элементарного приращения фазового сдвига, и на- чальным его значением, т.е. определяется величина действительного шага поворота ротора. Эта величина с помощью блока 14 сравнения сравнивается с заданным шагом поворота ротора, вычисленным ранее с помощью блока 15 вычисления- заданного щага.
Если сигнал рассогласования на выходе блока 14 сравнения имеется, то он, поступая на второй вход регулятора 11 фазового сдвига, запрещает подачу очередного приращения фазового сдвига. Когда сигнал рассогласования на выходе блока 14 сравнения станет равен нулю, регулятор 11 фазового сдвига задаст следующее элементарное приращение фазового сдвига. При этом блок 7 задания фазового сдвига сформирует задания на изменения фаз первого и второго питающих напряжений и
с
35
40
50
55
одновременно выдаст со своего третьего выхода сигнал на запись в блок 12 памяти нового значения угла поворота ротора, которое имеет место в данный момент. Величина нового элементарного приращения фазового сдвига также может оказаться иной, чем для предьщу- щего значения элементарного прираще- ния фазового сдвига, так как вычисля- ется блоком 15 вычисления элементарного приращения фазового сдвига. Далее процесс регулирования продолжается до тех пор, пока угол поворота
5 о лу поворота ротора, после чего на выходе, блока 9 сравнения сформируется сигнал, запрещаюцЦ Ш дальнейшее регулирование. Этрт сигнал поступает на первый вход регулятора 11 фазового сдвига и регулирование прекращается.
Регулирование угла поворота ротора двигателя двойного питания состоит таким образом из следующих этапов; задание требуемого угла поворота ротора, зада}1ие первого элементарного приращения фазового сдвига, ожидание достижения ротором двигателя двойного питания углового положения, соответствующего заданному приращению фазового сдвига} задание следующего элементарного приращения фазового сдвига после достижения ротором двигателя углового положения, соответствующего заданному приращению фазового сдвига и т.д.
Такое регулирование угла поворота малыми порциями обеспечг шает устойчивую работу двигателя двойного питания при любом требуемом угле поворота ротора, так как угол нагрузки никогда не превысит максимально допустимого значения.
Б случае фиксированной величины с ; элементарного приращения фазового сдвига датчик 18 угла нагрузки, сиг-, нальная обмотка 21 и блок 17 задания максимального угла нагрузки отсутствуют. Блок 16 вычисления элементарно го приращения фазового сдвига просто вьщает фиксированную величину элементарного приращения фазового сдвига.
Б случае фиксированной величины - приращения фазового сдвига блок 15 вычисления заданного щага также меня«- ет свои функции, так как вел1гчи- на заданного шага оказьюается постоянной и известной заранее (она рав5
0
0
5
:на элементарному приращению фазового сдвига, деленному на коэффициент электрической редукции Кр). Остальны блоки сохраняют свои функции.
В случае широтно-импульсной или амплитудно-импульсной модуляции питающих напряжений по синусоидальному закону фазы питающих напряжений измеряются дискретно. В этом случае задают величину элементарного приращния., равную одной фазов.ой диск-рете (которая определяется как доля периода первой гармоники питающих напряже- НИЙ5 приходящаяся па один тактовьШ импульс). Система зтравления инвертором с широтно-импульсной или амплитудно-импульсной модуляцией в таком случае оперирует уже не с величиной фазы, а с нoмepo i тактового импульса, соответствующего, требуемой фазе о Каждьш тактовый импульс имеет свою ширину (при широтной модуляции) или амплитуду (при амплитудной модуляции) , а среднее значение напряжения, получаемого при подаче того или иного тактового импульса на обмотку двигателя двойного питания (первую или вторую) равно значению синусоидального напряжения при соответствующей фйзе. Например, если в периоде первой гармоники питающих напряжений содержится 36 тактовых импульсов, при переходе от одного тактового импульса к ближайшему другому. фаза изменяется -на Ю, Номер тактового импульса соответствует фазе 5°, номер 2 - фазе IS , номер 7 - фазе 65 и т.п.
При отсутствии регулирования на каждом такте работы инверторов 4 и 5 (задаваемом блоком 6 задания частоты питающих напряжений) номер тактового импульса,.который подан на обмотки двигателя J двойного питания, берется равным номеру предьщущего тактового импульса плюс 1. При регулировании фазового сдвига номер каждого последующего тактового импульса берется равным номеру предыдущего плюс 1 плюс-минус 1 (в зависимости от требуемого направления перемеи(ения ротора и алгоритма, работы блока 7 задания фазового сдвига), т.е. происходит проскакивание очередного тактового импульса или задержка на предыдущем (повторение предыдущего).
Таким образом, осуществляется при нудительное изменение фазы того или
0
иного питаюи его напряжения. Выбор того, какую именно фазу и в каком нап-- равлении следует менять для обеспечения требуемого угла поворота ротора, осуществляет блок 7 задания фазового сдвига по заранее заложенной в него программе. В простейшем случае эта программа может быть, например, следующая. Если необходимо повернуть ротор двигателя в направлении, принятом за положительное, то сигнал на принудительное изменение фазы подается только на вход регулировки фазы 5 инвертора 4, причем осуптествляется перескакивание через очередной импульс. Если направление требуемого перемещения ротора отрицательное, сигнал на приаудительное 1змеиение фазы подается ла вход регулировки фазы тол7л -о инвертора 5 причем осуществляется также перескакивание через очередной тактовый импульс. Такая программа относительно просто реализуется и обладает свойством симметрия. -Знак направления перемещения ротора определяется с помощью первого блока 9 сравнения и поступает на первый вход регулятора 11 фазового сдвига.
Таким образомS предлагаемый способ регул.ирован.ил углового положения ротора двигателя двойног;о питания позволяет обеспечить контроль величины задаваемого приращения фазового сдвига мелсду напряжениями, питающими обмотки двигателя, а также обеспечить применение мгновенного значения угла нагрузки в заданных пределах, благодаря чему по сравнению с известным способом гарантируется нахождение двигателя двойного питания в синхро-. низме при любой величине требуемого угла поворота ротора и повышается устойчивость.
Адаптивный регулятор скорости обеспечивает наискорейшую отработку заданного перемещения ротора при ограничениях на величину мгновенного значения угла нагрузки. Изменения момента инерции электропривода или статического момента на залу двигателя двойного питания не влияют на устойчивость-двигателя двойного питания в переходных режимах.
0
5
0
5
0
5
Формула изобретения
питания по авт.св. J 1372582, отличающий тем, что, с uianbip повьшения устойчивости двигателя двойного питания в переходных режимах, устанавливают питающие переменные напряжения для обмоток указанного двигателя в виде последовательности модулированных по ширине или амплитуде в соответствии с синусо- идальным законом тактовых импульсов с одинаковыми частотами первых гармоник, в начале регулирования устанавливают требуемый фазовый сдвиг между указанными питающими перемениьми нап- ряжениями в виде ряда элементарны приращений фазового сдвига, на интервале регулирования каждого из элементарных приращений фазового сдвига измеряют величину действительного уг- ла поворота ротора двигателя двойного питания, сравнивают ее с величиной элементарного угла поворота ротора, соответствующей элементарному фазовому сдвигу питающих переменных
напряжений и при совпадении указан- ных величин переходят к регулированию следующего элементарного приращения фазового сдвига до полной обработки всего фазового сдвига и соответствующего ему углу поворота ротора двигателя двойного питания.