131
поперечным сечением по длине, уложенных вплотную в ящичную тару. Устройство представляет механизм схвата манипулятора, закрепляемого на головке манипулятора в корпусе 1 устройства, одновременно являющимся силовым цилиндром, размещены две пары коромысел, шарнирно соединенные с захватными губками 8. Коромысла установлены
1
Изобретение относится к машиностроению, а именно к подъемно-транспортным устройствам.
Цель изобретения - расширение эксплуатационных возможностей манипуля- тора путем обеспечения захвата грузов с переменным поперечньм сечением по длине, уложенных вплотную в ящичную тару.
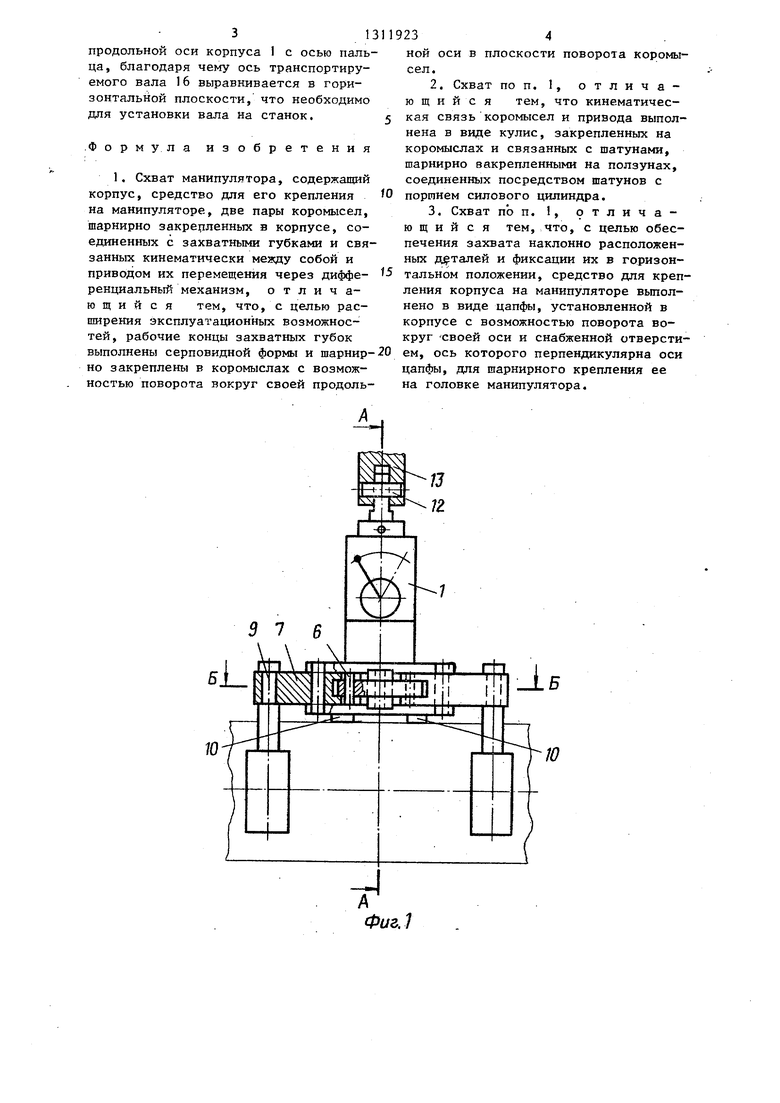
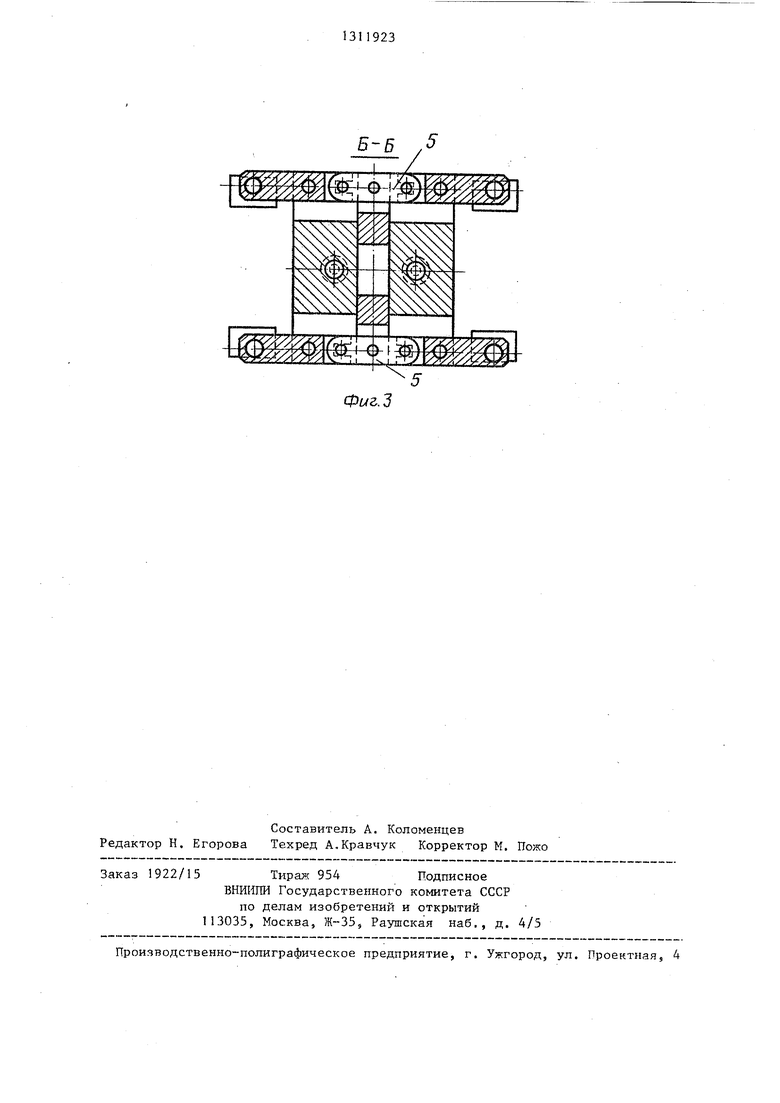
На фиг. 1 схематично изображено захватное устройство, обп{ий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2.
Схват манипулятора содержит корпус 1, служащий одновременно силовым цилиндром, в котором расположен плунжер 2, кинематически связанный посредством двух шарнирных шатунов 3 с ползунами 4, каждый из которых несет шатун 5 с поводковыми пальцами 6, По- следние взаимодействуют с кулисными паэ.ами, выполненными в каждом из коромысел 7, размещенных в корпусе 1 с возможностью поворота в горизонтальной плоскости и несущих захватные губки Sj которые посредством вертикально расположенных цапф 9 шарнирно закреплены на концах коромысел 7 и имеют рабочую поверхность серповидной формы.
В корпусе 1 установлены два ре- гулируемьк опорных элемента 10 и поворотная цапфа 11, в которой имеется перпендикулярно ее оси отверстие 12 для щарнирного ее крепления к головке 13 манипулятора. На поворотной цапфе 11 установлена обойма 14 для подвода рабочей среды через соответствующий канал на цапфе 11 в полость силового цилиндра, совмещенного с
923
с возможностью поворота в горизонтальной плоскости, а захватные губки имеют свободное вращение вокруг своей продольной оси в плоскости поворота коромысел. Б корпусе устройства размещена вертикально-поворотная цапфа, являющаяся также связующим звеном с головкой манипулятора. 2 з.п. ф-лы, 3 ил.
О
5
0
5 0
корпусом 1, на котором установлен кран 15 управления.
Устройство работает следующим образом.
При захвате вала 16, уложенного в ящичную тару (не показано 1, необходимо головку 13 манипулятора переместить до совмещения продольной оси захватного устройства с осью вала 16 и дать команду на перемещение голов- ки 13 манипулятора вниз. При этом в случае наклонного расположения вала в ящичной таре корпус 1 устройства необходимо повернуть на поворотной цапфе 11 на угол 90 относительно оси пальца, обеспечив возможность качания корпуса 1 в вертикальной плоскости для контакта регулируемых опорных элементов 10 с верхней образующей вала 16.
1
При перемещении головки 13 манипулятора вниз захватные губки 8 проходят своими рабочими поверхностями серповидной формы по боковым поверхностям вала 16, отталкивая при этом примыкающие к нему соседние валы.
Поворотом крана 15 управления включается силовой цилиндр, плунжер 2 которого перемещает кинематически связанные с ним ползуны 4.
При перемещении ползунов 4 коромысла 7 захватных органов, связанные с ползунами посредством шатунов 5, поворачиваются в горизонтальной плоскости, захватывая как гладкие, так и ступенчатые валы в двух поперечных сечениях.
После подъема головки 13 манипулятора корпус I может быть повернут на поворотной цапфе 11 до совмещения
продольной оси корпуса 1 с осью пальца, благодаря чему ось транспортируемого вала 16 выравнивается в горизонтальной плоскости, что необходимо для установки вала иа станок.
.Формула изобретения
1. Схват манипулятора, содержащий корпус, средство для его крепления на манипуляторе, две пары коромысел, шарнирно закрепленных в корпусе, соединенных с захватными губками и свя занных кинематически меззду собой и приводом их перемещения через дифференциальный механизм, отличающийся тем, что, с целью расширения эксплуатационных возможностей, рабочие концы захватных губок выполнены серповидной формы и шарнирно закреплены в коромыслах с возможностью поворота вокруг своей продоль
ной оси в плоскости поворота коромысел.
2.Схват по п. 1, отличающийся тем, что кинематическая связь коромысел и привода выполнена в виде кулис, закрепленных на коромыслах и связанных с шатунами, шарнирно закрепленными на ползунах, соединенных посредством шатунов с поршнем силового цилиндра.
3.Схват по п. , отличающийся тем, что, с целью обеспечения захвата наклонно расположенных деталей и фиксации их в горизонтальном положении, средство для крепления корпуса на манипуляторе выполнено в виде цапфы, установленной в корпусе с возможностью поворота вокруг своей оси и снабженной отверстием, ось которого перпендикулярна оси цапфы, для шарнирного крепления ее
на головке манипулятора.
I I -L
Фиг. 1
5-5 5
Фиг.З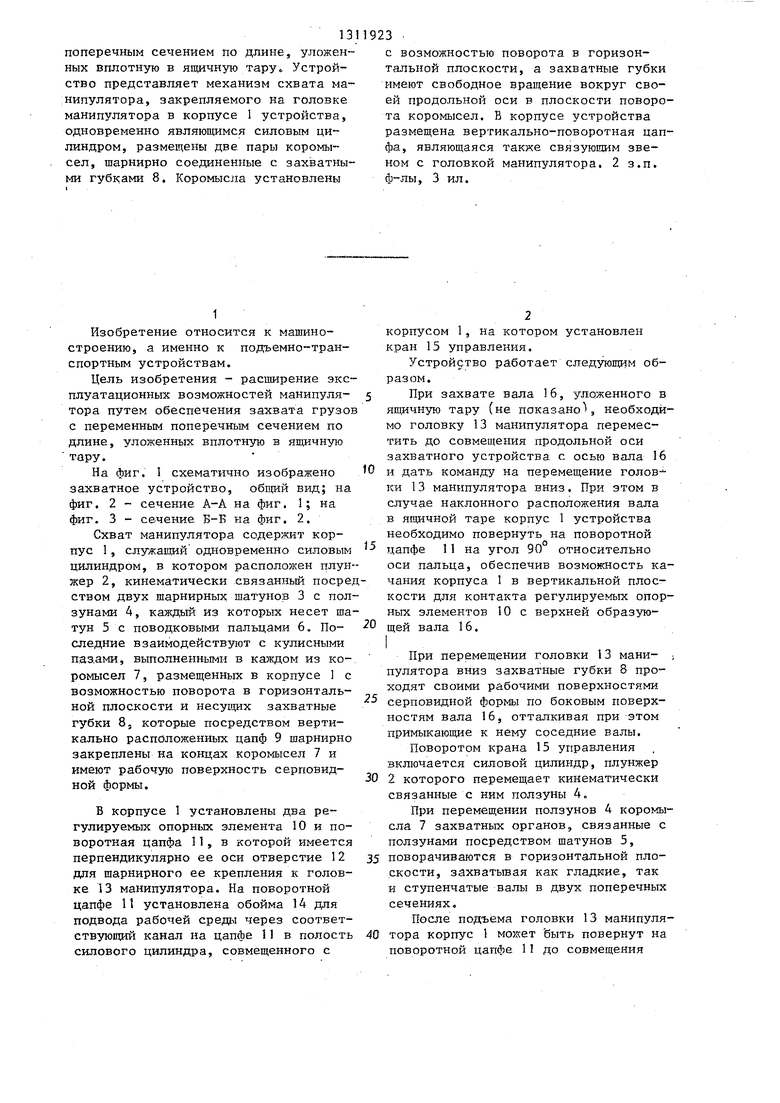
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| Схват | 1982 |
|
SU1077781A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Манипулятор | 1986 |
|
SU1315228A1 |
| Клещевая головка ковочного манипулятора | 1987 |
|
SU1449229A1 |
| Захват манипулятора | 1979 |
|
SU812567A1 |
Изобретение относится к машиностроению, а именно к подъемно-транспортным устройствам, и может быть использовано при механизации соответствующих технологических процессов на различных производствах с использованием манипулятора. Цель изобретения - расширение эксплуатационных возможностей манипулятора путем обеспечения захвата грузов с переменным / а 15 (Л 00 со U2.2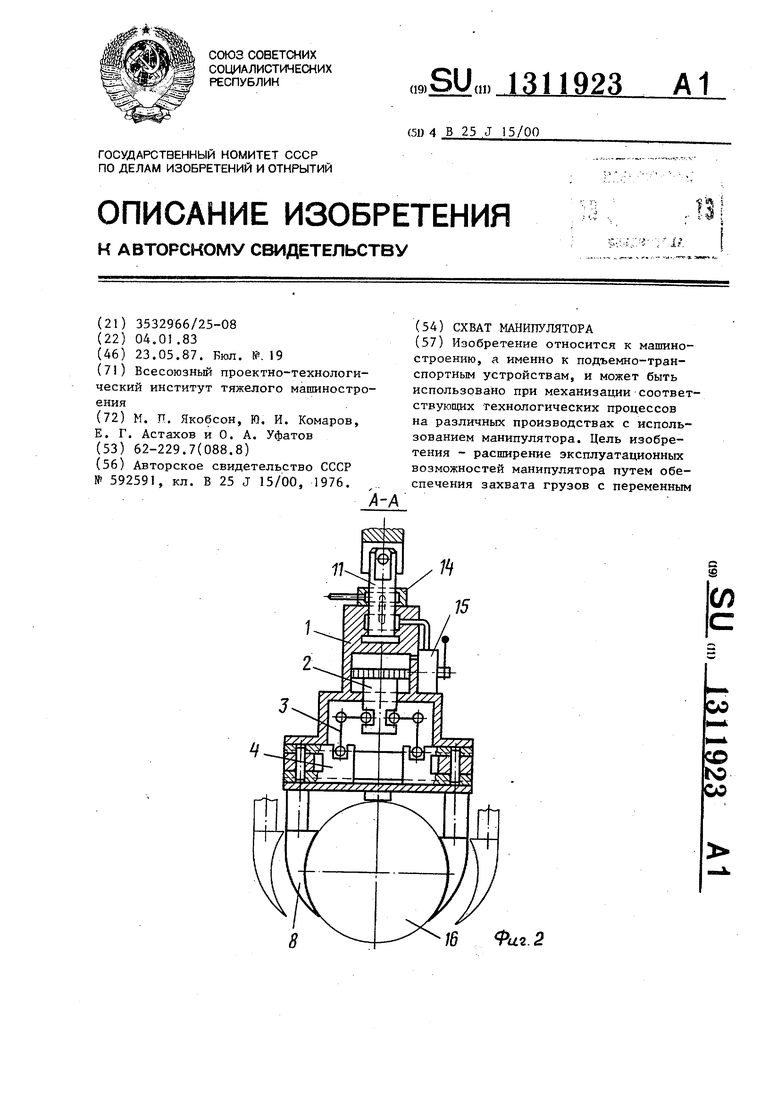
| Захват | 1976 |
|
SU592591A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
