11
Изобретение относится к машиностроению, в частности к устройствам для загрузки технологического оборудования, а именно к конструкциям манипуляторов.
Цель изобретения - расширение технологических возможностей манипулятора путем обеспечения захвата деталей типа валов, уложенных в тару вплотную друг к другу.
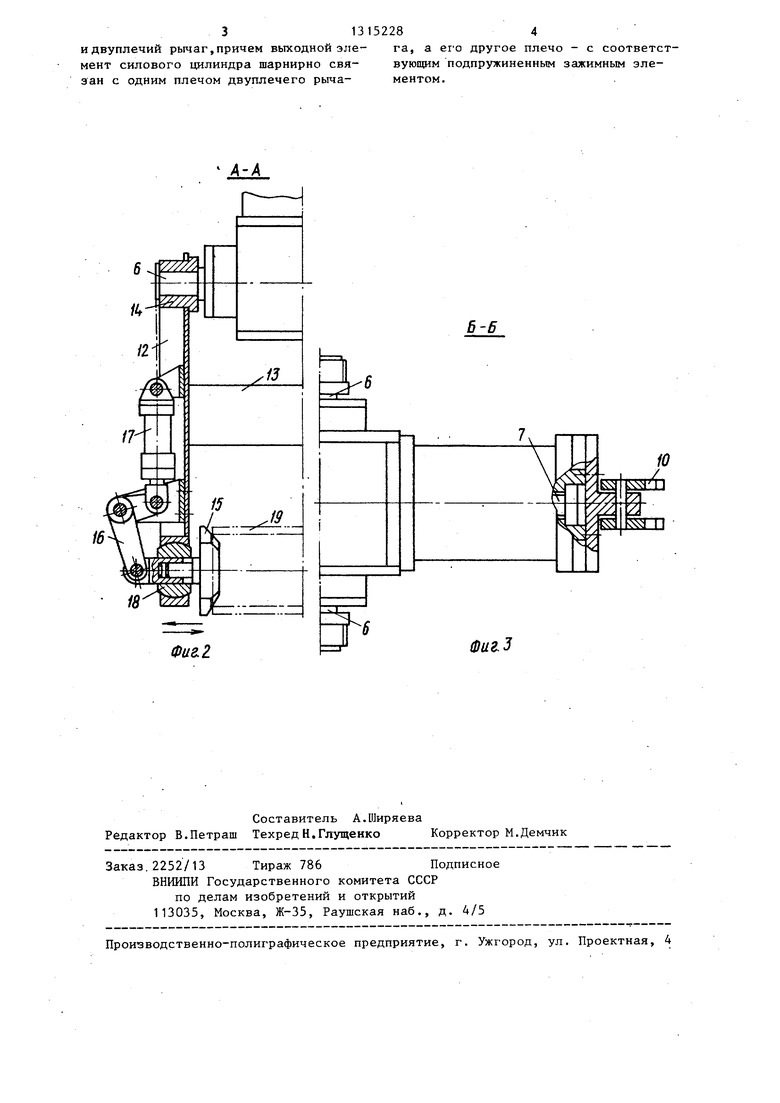
На фиг. 1 схематично изображен манипулятор; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Манипулятор содержит основание в виде портала 1, по направляющей которого перемещается каретка 2 с приводом 3 ее перемещения.Внутри каретки 2 установлена с возможностью возвратно-поступательного перемещения от привода 4 механическая рука, вьтолненная в виде щтанги 5, на конце которой смонтированы три привод- .ные цапфы 6 и 7, расположенные во взаимно-перпендикулярных плоскостях и перпендикулярно оси штанги 5. На одной приводной цапфе 7 смонтировано с возможностью поворота вокруг ее оси и фиксации в промежуточных положениях захватное устройство 8, а на двух других соосных цапфах 6 смонтирован питатель 9, имеющий возможность поворота на 90 в сторону захватного устройства 8. Последнее имеет зажимные губки 10, связанные с гидрюцилиндром 11.
Питатель 9 выполнен в виде двух рычагов 12, жестко связанных между собой перемычкой 13 и шарнирно установленных на штанге 5 посредством втулок 14, смонтированных в цапфах 6 механической руки. На каждом рычаге 12 шарнирно установлены подпружиненный зажимной элемент 15, двуплечий рычаг 16 и силовой цилиндр,например гидроцилиндр 17. При этом выходной элемент (шток) гйдроцилин- дра 17 шарнирно связан с одним плечом двуплечего рычага 16 а его другое плечо шарнирно связано с подпружиненным зажимным элементом 15, установленным в сферической втулке 18 для устранения перекосов при захвате заготовки 19.
Манипулятор работает следующим образом.
Уложенные в тару 20 заготовки 19 подаются шаговым транспортером (не
52282
показан) в зону действия манипулятора таким образом, чтобы середина длины заготовки 19 совмещалась с серединой расстояния между подпружи- 5 ненными зажимными элементами 15.
Затем штанга 5 вместе с питателем 9 опускается вниз до установки зажимных элементов 15 питателя 9 в отверстия заготовки 19. По сигналу про- исходит включение гидроцилиндров 17, с которыми связаны зажимные элементы 15. Заготовка 19 центрируется, зажимается с обоих торцов и поднимается на высоту, превышающую верхний край тары 20. Питатель 9 подает заготовку 19 в захватное устройство 8 при отжатых зажимных губках 10, где происходит зажим заготовки 19 и подача ее на рабочую позицию. Подпружиненные зажимные элементы 15 разжимаются, а питатель 9 опускается в нижнее исходное положение.
При необходимости может производиться поворот захватного устройства 8 вокруг оси цапфы 7 и фиксация его в требуемом положении.
При установке заготовки 19 на рабочую позицию технологического оборудования захватное устройство 8 освобождает заготовку 19, к аретка 2, возвращается в позицию для захвата следующей заготовки, и цикл повторяется .
Все перемещения и остановки по 35 позициям загрузки и выгрузки обеспечиваются системой электронного управления (не показана).
Формула изобретения 40
Манипулятор, содержащий основание в виде портала, каретку, установленную с возможностью перемещения вдоль портала, механическую руку с захват- 5 ным устройством, закрепленную на каретке, и приводы их перемещений, отличающийся тем, что, с целью расширения технологических
25
50
возможностей он снабжен установленным на механической руке с возможностью поворота в плоскости зажима захватного устройства питателем,выполненным в виде подпружиненных зажимных элементов, двух рычагов, шар- 55 мирно закрепленных на конце механической руки и жестко связанных между собой, при этом на каждом из них шарнирно установлены силовой цилиндр
313152284
идвуплечий рычаг,причем выходной эле- га, а его другое плечо - с соответст- мент силового цилиндра шарнирно свя- вующим подпружиненным зажимным эле- эан с одним плечом двуплечего рыча- ментом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки металлорежущего станка | 1986 |
|
SU1360967A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Технологический комплекс | 1985 |
|
SU1284825A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Установка для межоперационного перемещения заготовок | 1982 |
|
SU1061904A1 |
| Манипулятор | 1987 |
|
SU1549745A1 |
| Манипулятор | 1987 |
|
SU1423368A1 |
| Устройство для ориентации, базирования и подачи листовой заготовки в рабочую зону пресса | 1991 |
|
SU1784376A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
Изобретение относится к области машиностроения, а именно к манипуляторам для загрузки технологического оборудования. Целью изобретения является расширение технологических возможностей за счет обеспечения захвата деталей типа валов, уложенных в тару вплотную друг к другу. Для этог о на механической руке манипулятора установлен с возможностью поворота в плоскости зажима заготовок захватным устройством 8 питатель 9. Заготовки 19 из тары 20 захватываются с обоих торцов зажимными элементами 15 питателя. Затем механическая рука за счет подъема и поворота питателя 9 переносит заготовку 19 в зажимные губки 10 захватного устройства 8 для дальнейшей ее установки на рабочую позицию технологического обо- рудовайия. 3 ил. I (/) сл ю ю 00
х13
15
---JS
э:
6-6
Фиг.3
Составитель А.Ширяева Редактор В.Петраш Техред Н.Глущенко Корректор М.Демчик
Заказ,2252/13 Тираж 786Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Автооператор | 1977 |
|
SU622634A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
