(54) ЗАХВАТ МАНИПУЛЯТОРА

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1987 |
|
SU1404433A1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| Схват | 1985 |
|
SU1289679A1 |
1
Изобретение относится к технологическому оборудованию, применяемому для механизации технологических процессов, и может быть использовано в к «струкциях погрузочных машшуляторов и механических рук.
Известно устройство захвата, содержащее неподвижный корпус, ползун и захватные рычаги ЦЗНедостатком известного устройства является то, что оно способно поднять объект манипулирования только с промежуточной опоры, так как захватный рычаг необходимо завести под объект манипулирования, что сужает технологические возможности этого устройства.
Цель изобретения - расширение технологических возможностей захвата.
Поставленная цель достигается тем, что захват снабжен шариирно установленными на корпусе крюками, кинематически связанным с ползуном штоком с конусной головкой и установленйой с
i возможностью перемещения на штоке втулкой-расцепителем, вахватные рычаги кинемепгнчески св51ааны с ползуном и со штоком, а Jфюки устано. шены с возможностью поочередного
5 г: взаимодействия с конусной головкой штока и втулкой-расцепителем.
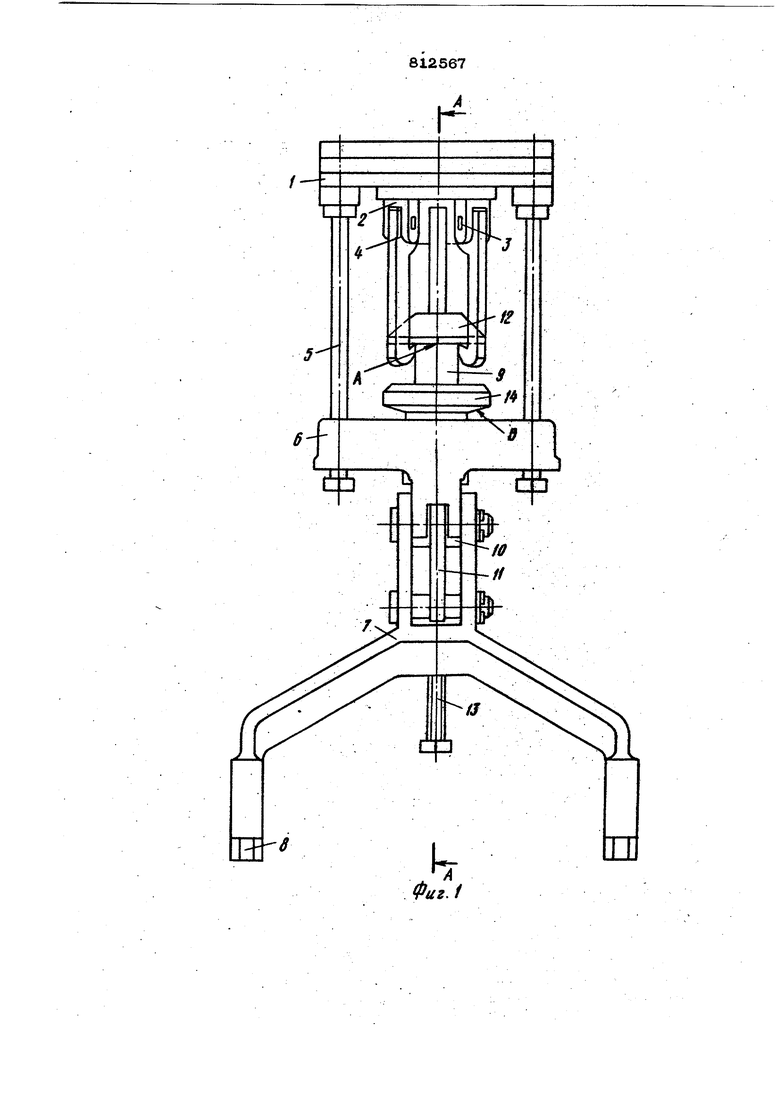
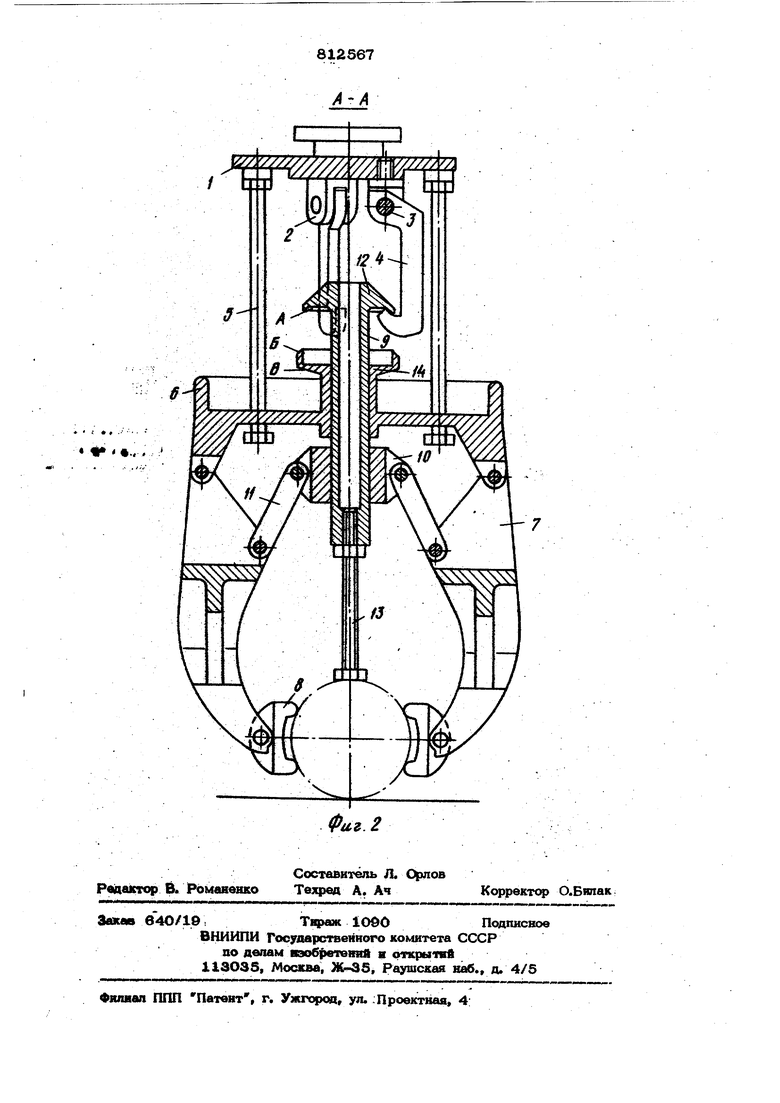
На фиг. 1 схематически изображен предлагаемый захват манипулятора, общий вид; на фиг. 2. - разрез А-А на фиг. 1.
Захват манипулятора состоит из ; i неподвижного корпуса 1, несущего BBnkH 2, на осях 3 которых подвешены крюкя . 4. В корпусе 1 укреплены направляющие 5,вдоль KOTqpbix может перемещаться ползун 6 с ш нирно установленными захватами рычагами 7, имеющими зажимные губки 8. Захватные рычаги 7 кинематически связаны с жестко закрепленным на штоке 9 коромыслом 1О при помощи серег 11. Шток 9, подвижный относительно ползуна 6, оканчивается конусной головкой 12. С дру- , гого ковпа в шток 9 ввернут щуп 13. Вдоль штока свободно перемещается втулка-р цепитель 14. Устройство работает следующим образом. В исхйдном положении ползун 6 под действием собственного веса сдвинут до упора вдоль направляющих 5. Втулка расцепвтеЛь 14 лежит на ползуне 6 а шток 9, опустившийся под действием собственного веса, прижимает сверху конусной головкой 12 втулку-расцепитель. Связанные серьгами 11 с короМ Ь1слом 1О штока 9 захватные рычаги 7 разжаты и губки 8 разведены. При опускании захвата щуп 13 упирается в деталь, в результате чего шток смещается вверх относительно ползуна 6, заставляя сжиматься кинематически связанные с ним губки 8 и зажать де таль. После этого захватные рычаги зап1факугся и дальнейшее смещение вни поязуиа 6 и штока 9 становитхгя невозмож ным. Нап1 вляющие 5 продолжающего опускаться корпуса 1 скользят вдоль ползуна 6, а крюки 3, шарнирно устано ленные на корпусе 1, наезжают на конусную головку 12, раздвигаются и, пропустив головку дальше вверх, подхватывают ее лсд опорную плоскость А Деталь зажата и может транспортирова ся.
После того, i как onycKaeMiaH. деталь коснется опорной поверхности, запертые и неимею щие возможности дальнейшего перемещения захватные рычаги 7, серьги 11, шток с конусной головкой 12 и ползун 6, на котором лежит втулк расцепитель 14, останавливаются, а . корпус 1 продолжает смещаться вниз, в рез ьтате чего крюки 4 наезжакхг на верхний кгааус Б втулки- засцепителя 14, раздвигаются и, сместившись еще ниже, подхватывают втулку- асцепитепь под нижнюю конусную поверхность В. Начинается подъем схвата. Во время подъеме корпуса 1 вверх втулка расдепипрель, подхваченная крюками, свободно перемещается вдоль штока, в то время как ползун б вместе с зажатой в губках 8 рыча1ч)В 7 деталью и штоком 9 с конусной головкой 12 остае-гся на мест проскальзывая по направляющим 5.
Формулаизобретения
Захват манипулятора, содержащий неподвижный карате, ползун и захватные рычаги, отличающийся тем, что с целью расширения технологических возможностей, он снабжай шарнирно установленными на корпусе крюками, кинематически связанным с ползуном штоком с конусной головкой и установленной с возможностыо перемещения на штоке втулкой-расцепителем, причем захватные рычаги кинематически связаны с ползуном н со штоком, а крюки установлены с возможностью поочередного взаимодействия с конусной головкой штока и втулкой-расцепителем.
Источники информации, принятые во внимание при экспертизе
1, Патент Японии № 52-11986, кл. 83 F 91, 1977. При дальнейшем движении корпуса вверх втулка-расдепитель упирается в конусную головку штока, в результате чего усилие со стороны конусной поверхности В втулки-расдепителя на крюки 4 возрастает, крюки расходятся, и, сместившись вдоль дилиндричёской части втулки-, расцепителя, оказываются надконусной головкой .12, а. втулка 14 соскальзывает обратно и ложится на ползун 6. Рычаги схвата расфиксированы. Корпус 1 продол ает подниматься вверх и, после того как ползун 6 упрется в ограничители, направляющих 5, подни|01ается ними вверх, раздвигая захватные рычаги 7 и освобождая деталь. Применение предлагаемого устройства . в конструкциях погрузочных манипуляторов и механических рук позволяет |захватывать детали произвольной формы непосредственно с плоскости без их предвфителыюй .установки на прОг- межуточную опору, а также работать с делителями, значительно отпичаюшнмися своими линейными размерами, что расширяет технологические возможности манипуляторов и механических рук, осяащешгых предлагаемым захватом. Кроме того 1фименение этого устройства возможно в качестве клещевого самозажима,- ющегося захвата в грузоподъемных машинах.
812567 А
W
Ьз
М7
3-/
п
. /
