СХ
:о ее
со со
4:
Изобретение относится к сельскому хозяйству, в частности к способам управления мобильными агророботами.
Цель изобретения - повышение надежности управления.
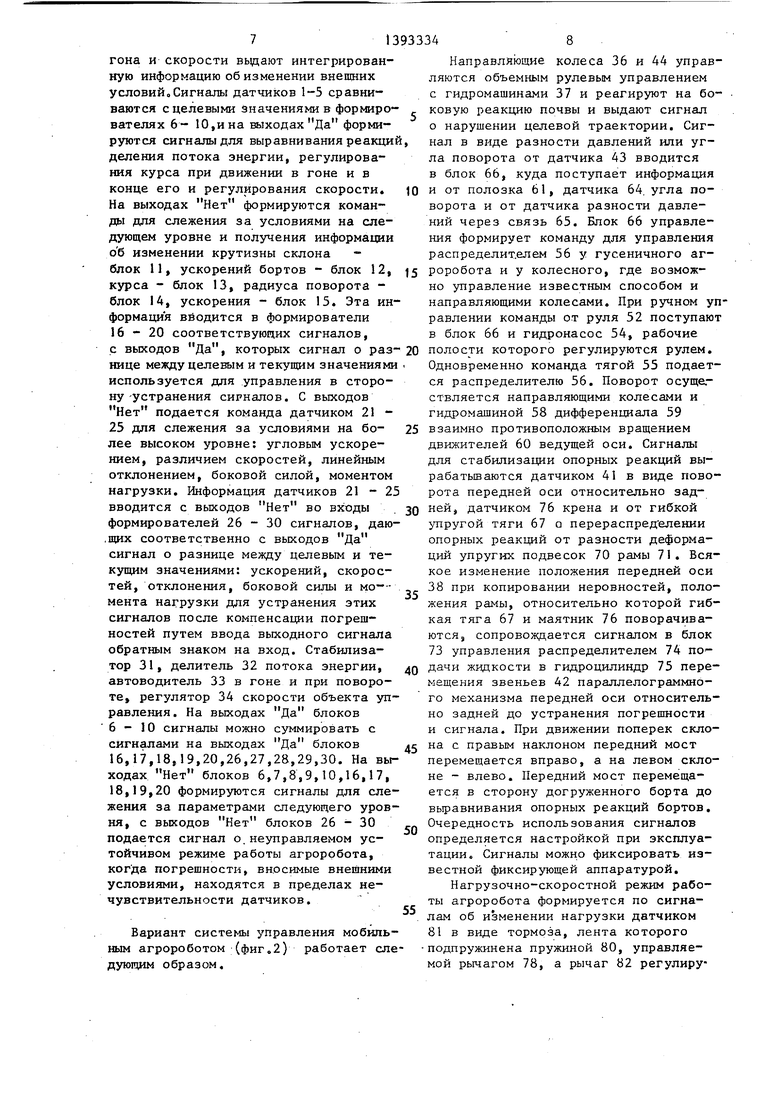
На фиг.1 дана графЖ1еская интерпретация многоуровневой модели для реализации способа формирования режима агроробота при повороте по интегрированной информации о внешних условиях;«на фиг. 2 - схема варианта системы управления агроробо том; на фиг. 3 - алгоритм управлеьшя моторно-трансмиссионной и тормозной системами формирования режима работы при одновременном изменении углов поворота и крутизны склона; на фиг.4 - вариант выполнения связи элементов управления полуроботом с учетом центробежной силы; на фиг. 5 - алгоритм управления в режимах утилизации энергии толкающей силы и торможения в период поворота; на фиг. 6 - схема возникновения закономерной погрешности траектории агроробота-склоно- хода пропорционально наклону колес к опорной поверхности и возникновения поворачиваю1иих моментов колес за счет изменения радиуса качения; на фиг. 7 - связи сигналов формирования траектории; на фиг. 8 - связи сигналов регулирования скорости; на фиг. 9 - то же, что на фиг.З, но без буквенного обозначения параметров.
Сущность способа заключается в том, что измеряют отклонение агроробота от курса и базовой линии в гоне осуществляют вождение агроробота по сигналу об отклонении от курса и базовой линии, поворот его в конце гона, измерение скорости движения, ведущих моментов и опорных реакций движителей, регулирование скорости, ведущих моментов и стабилизацию опор- ,5° 23 - за линейным отклонением, 24 - ных реакций движителей по результатам за изменением боковой силы, 25 - за
Датчики, предназначенные для слежения: 21 - за угловым ускорением, 22 - за различием скоростей бортов.
формирования режима при повороте путем использования интегрированной и упреждающей информации об изменении внешних условий (фиг.1), которая имеет блок I слежения за изменением опорных реакций, блок 2 определения разницы ведущих моментов, блок 3 измерения линейного отклонения от целевой
траектории при работе в гоне, блок 4 измерения радиуса поворота, блок 5 измерения скорости движения, блоки 6-10 сравнения измеряемых параметров с целевыми их значениями для формирования сигнала. Блок 6 - формирователь сигнала о разнице между целевым и текущим значениями опорных реакций, блок 7 - формирователь сигнала о разнице ведущих моментов, блок 8 - формирователь сигнала о линейном отклонении от целевой траектории, блок 9 - формирователь сигнала о радиусе поворота, блок 10 - формирователь сигнала об изменениии скорости по .
сравнению с целевым ее значением. Если разница между целевым и текущим значениями положительна, формируется сигнал на выходе Да. На выходе Нет сигнал указывает на переход для слежения за параметрами на следующем уровне. Датчики 11-15 выдачи информации - преобразователи сигнала соответственно: 11 - угла крутизны Склона, 12 - ускорений бор- той, 13 - курса, 14 - радиуса поворс
та, 15 - ускорения, служат для вво23 - за линейным отклонением, 24 - за изменением боковой силы, 25 - за
да информации в формирователи сигналов соответственно в 16 - об изменении крутизны склона, в 17 - ускоре- НИИ бортов, в 18 - курса, в 19 - радиуса поворота, в 20 - ускорения.
Датчики, предназначенные для слежения: 21 - за угловым ускорением, 22 - за различием скоростей бортов.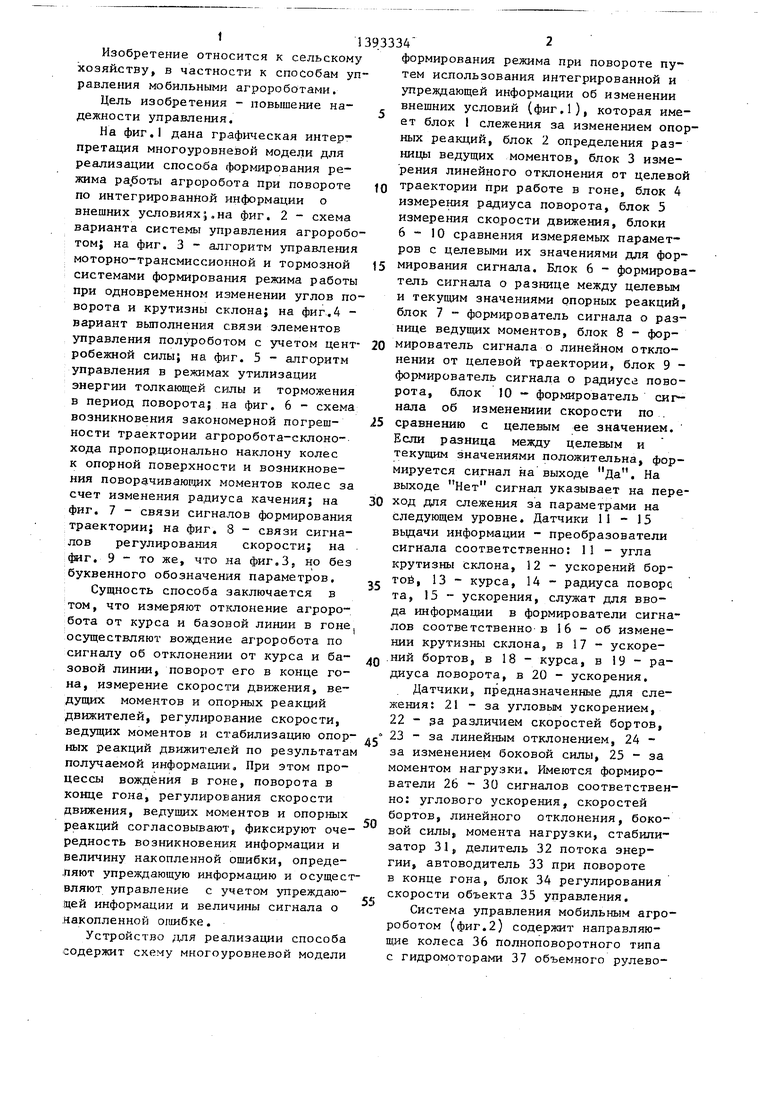
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением агроробота | 1986 |
|
SU1551263A1 |
| Способ управления агророботом | 1987 |
|
SU1556557A1 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| МАШИНА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2011 |
|
RU2474502C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬХОЗМАШИНЫ | 1989 |
|
RU2023359C1 |
| Способ управления агрегатом при работе на склонах | 1988 |
|
SU1782373A1 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| ДВИГАТЕЛЬ САМОХОДНОЙ МАШИНЫ | 2010 |
|
RU2450135C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |

Изобретение относится к сельскому хозяйству. Цель изобретения - повьшение надежности управления. Измеряют отклонение от курса и базовой линии в гоне. Осуществляют вождение мобильного агрегата по сигналу об отклонении его от курса и базовой линии в гоне. Производят поворот мобильного агрегата в конце гона. Одновременно измеряют скорость движения, ведущие моменты и опорные реакции движителей. Затем производят регули - рование скорости, ведущих моментов и опорных реакций движителей по результатам полученной информации. При этом процессы вождения в гоне, поворота в конце гона, регулирование скорости движения, ведущих моментов и опорных реакций согласовывают. Очередность возникновения информации и величину накопленной ошибки фиксируют. Определяют упреждающую информацию. Осуществляют управление с учетом этой упреждающей информации и величины сигнала о накопленной ощиб- ке. 9 ил. с SS (Л
получаемой информации. При этом процессы вождения в гоне, поворота в конце гона, регулирования скорости движения, ведущих моментов и опорных реакций согласовывают, фиксируют очередность возникновения информации и величину накопленной ошибки, определяют упреждающую информацию и осуществляют управление с учетом упреждаю- дей информации и величины сигнала о накопленной ошибке.
Устройство для реализации способа содержит схему многоуровневой модели
0
5
моментом нагрузки. Имеются формирователи 26 - 30 сигналов соответственно: углового ускорения, скоростей бортов, линейного отклонения, боковой силы, момента нагрузки, стабилизатор 31, делитель 32 потока энергии, автоводитель 33 при повороте в конце гона, блок 34 регулирования скорости объекта 35 управления.
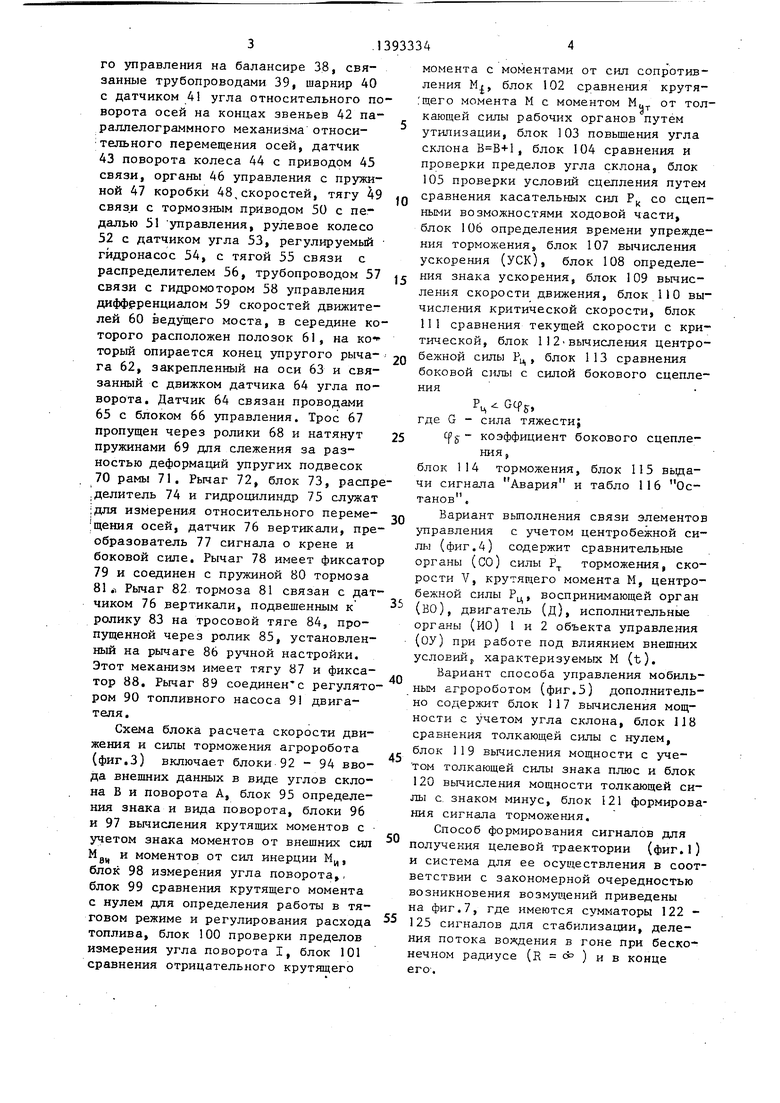
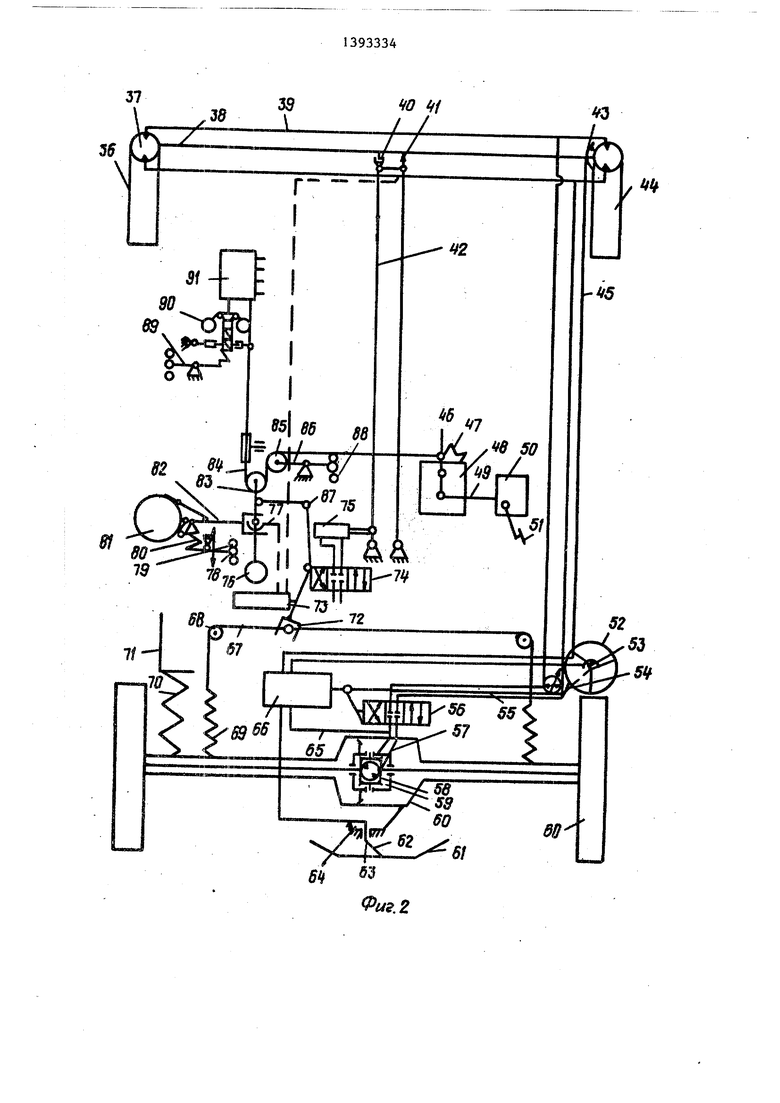
Система управления мобильным агро- роботом (фиг.2) содержит направляющие колеса 36 полноповоротного типа с гидромоторами 37 объемного рулево
го управления на балансире 38, связанные трубопроводами 39, шарнир 40 с датчиком 41 угла относительного поворота осей на концах звеньев 42 па- раллелограммного механизма относи- тельного перемещения осей, датчик 43 поворота колеса 44 с приводом 45 связи, органы 46 управления с пружиной 47 коробки 48,скоростей, тягу 49 связи с тормозным приводом 50 с педалью 51 управления, рулевое колесо 52 с датчиком угла 53, регулируемый гидронасос 54, с тягой 35 связи с распределителем 56, трубопроводом 57 связи с гидромотором 58 управления дифференциалом 59 скоростей движителей 60 ведущего моста, в середине которого расположен полозок 61, на который опирается конец упругого рычага 62, закрепленный на оси 63 и связанный с движком датчика 64 угла поворота. Датчик 64 связан проводами 65 с блоком 66 управления. Трос 67 пропущен через ролики 68 и натянут пружинами 69 для слежения за разностью деформаций упругих подвесок 70 рамы 71. Рычаг 72, блок 73, распр .делитель 74 и гидроцилиндр 75 служат :для измерения относительного переме- щения осей, датчик 76 вертикали, преобразователь 77 сигнала о крене и боковой силе. Рычаг 78 имеет фиксато 79 и соединен с пружиной 80 тормоза 81,1 Рычаг 82 тормоза 81 связан с датчиком 76 вертикали, подвешенным к ролику 83 на тросовой тяге 84, пропущенной через ролик 85, установленный на рычаге 86 ручной настройки. Этот механизм имеет тягу 87 и фиксатор 88, Рычаг 89 соединение регулятором 90 топливного насоса 9 двигателя.
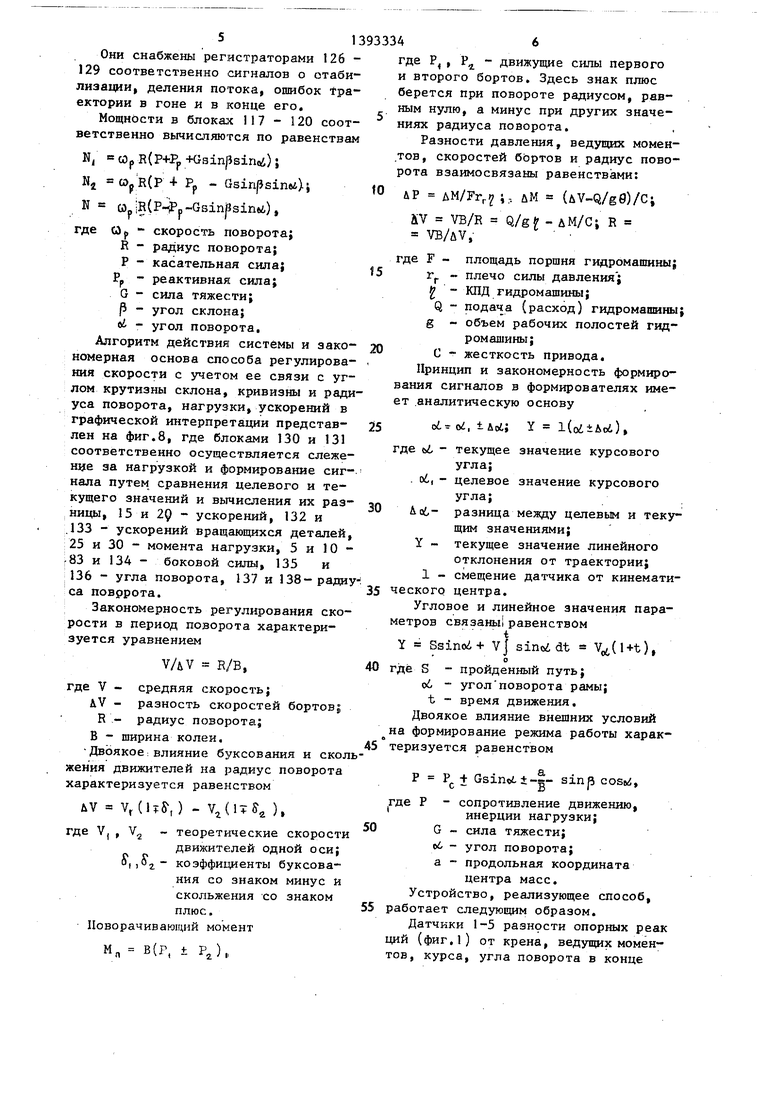
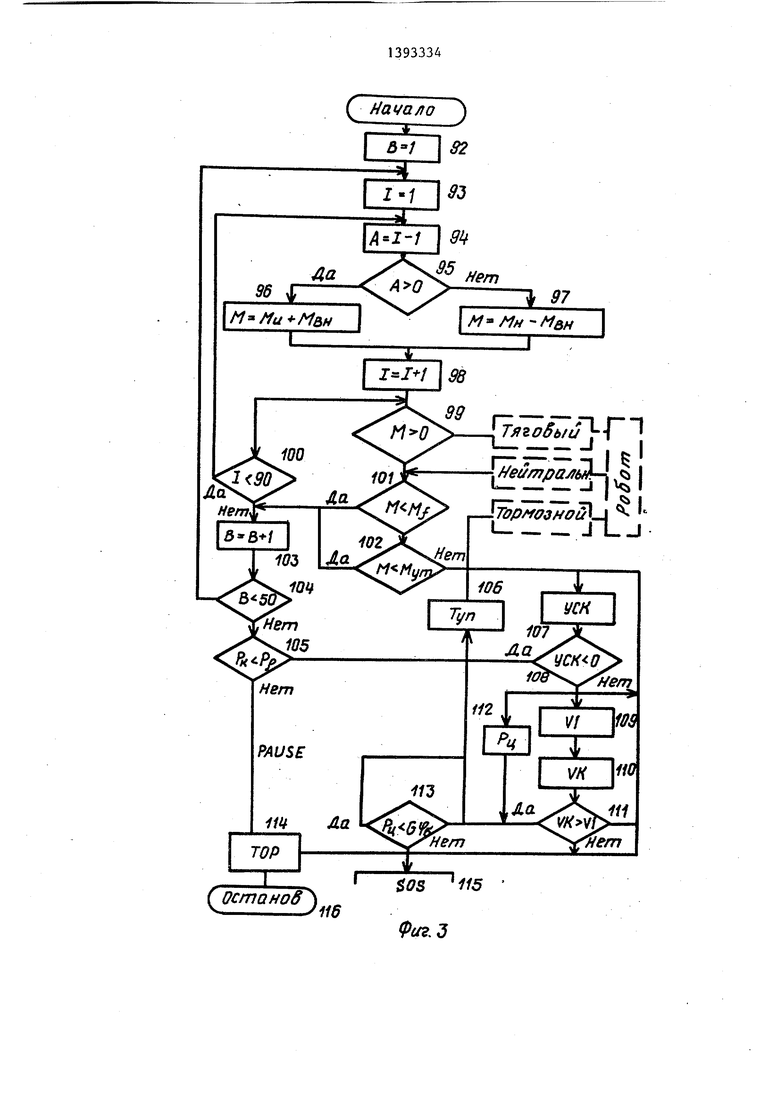
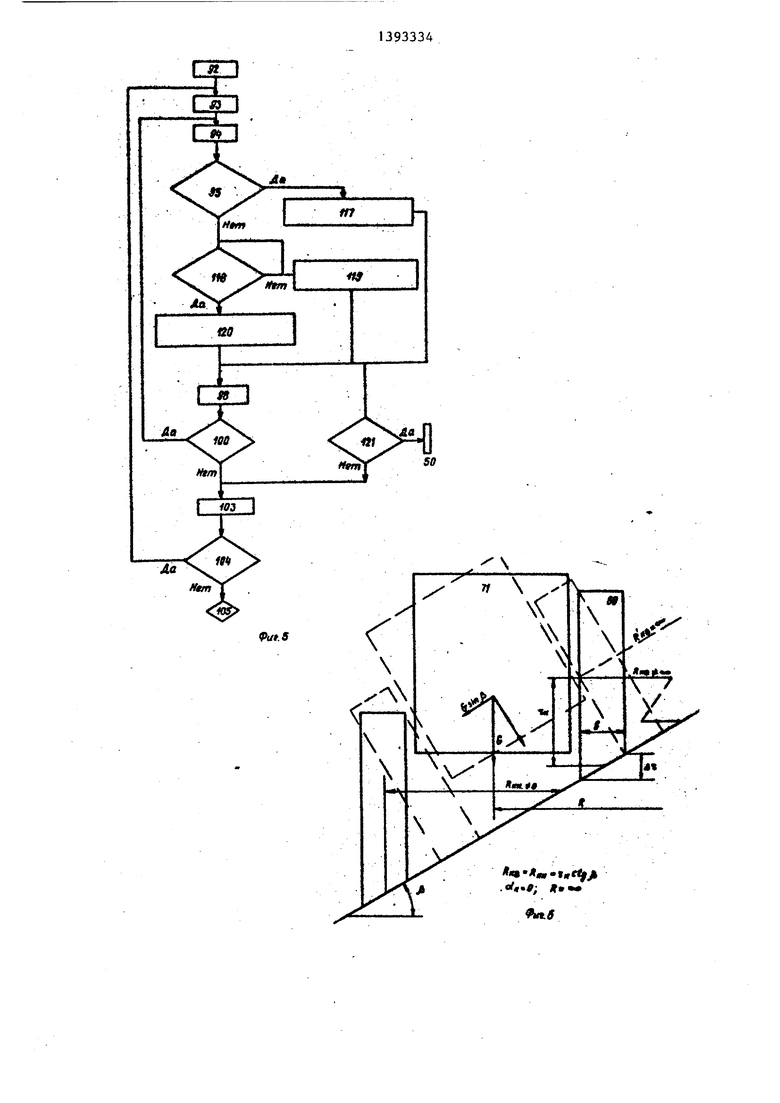
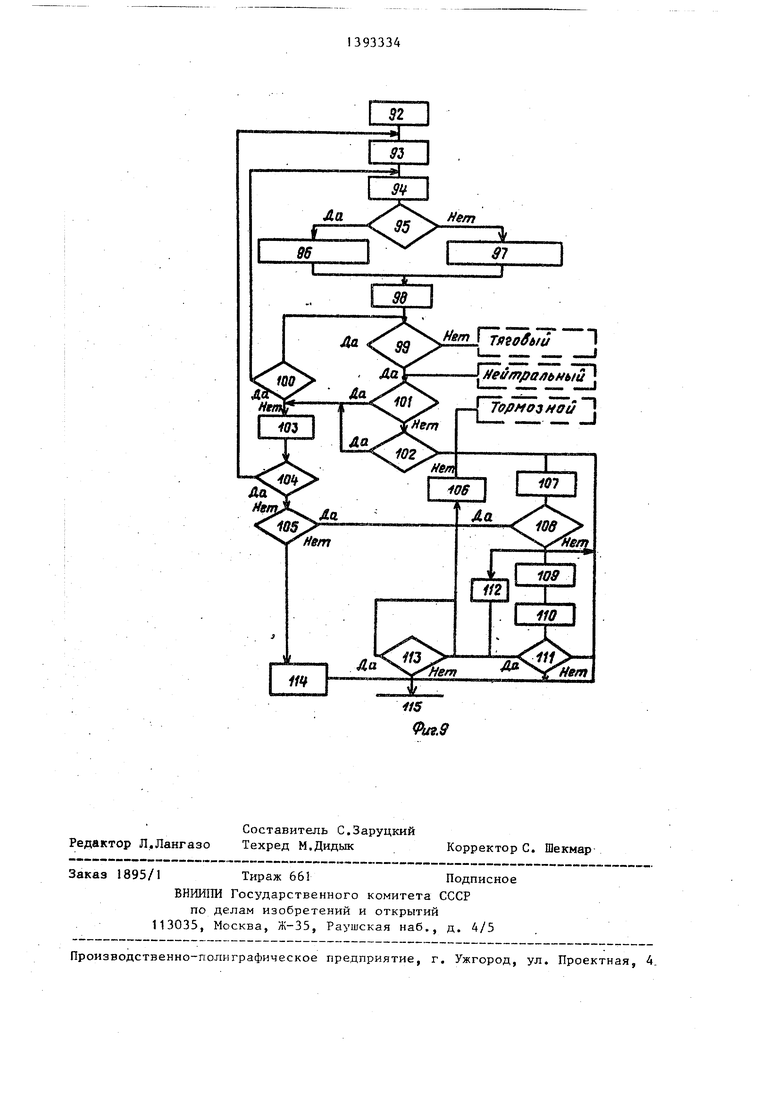
Схема блока расчета скорости движения и силы торможения агроробота (фиг,3) включает блоки 92 - 94 ввода внешних данных в виде углов склона Б и поворота А, блок 95 определения знака и вида поворота, блоки 96 и 97 вычисления крутящих моментов с учетом знака моментов от внешних сил Мд и моментов от сил инерции М,, блок 98 измерения угла поворота,, блок 99 сравнения крутящего момента с нулем для определения работы в тяговом режиме и регулирования расхода топлива, блок 100 проверки пределов измерения угла поворота I, блок 101 сравнения отрицательного крутящего
0
5
0
5
Q
момента с моментами от сил сопротивления Mf, блок 102 сравнения крутящего момента М с моментом Му от толкающей силы рабочих органов путем утилизации, блок 103 повьпиения угла склона , блок 104 сравнения и проверки пределов угла склона, блок 105 проверки условий сцепления путем сравнения касательных сил Р, со сцепными возможностями ходовой части, блок 106 определения времени упреждения торможения, блок 107 вычисления ускорения (УСК), блок 108 определения знака ускорения, блок 109 вычисления скорости движения, блок 110 вычисления критической скорости, блок 111 сравнения текущей скорости с критической, блок 112 вычисления центробежной силы Рц, блок 113 сравнения боковой силы с силой бокового сцепления
Рц Gcfj, где G - сила тяжести;
f коэффициент бокового сцепления,
блок 114 торможения, блок 115 вьща- чи сигнала Авария и табло 116 Останов.
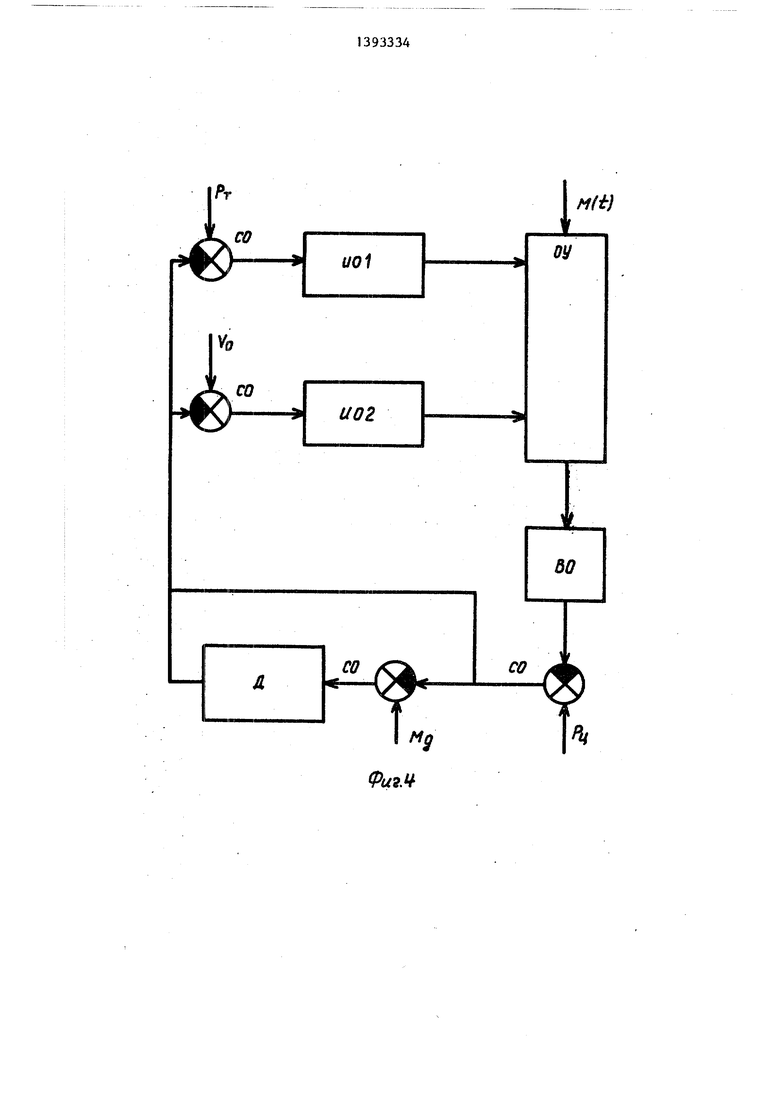
Вариант выполнения связи элементов управления с учетом центробежной силы (фиг.4) содержит сравнительные органы (со) силы Р. торможения, скоQ
5
0
45
0
5
рости V, крутящего момента М, центробежной силы Рц, воспринимающей орган (во), двигатель (д), исполнительные органы (ИО) 1 и 2 объекта управления (ОУ) при работе под влиянием внешних условийJ, характеризуемых М (t).
Вариант способа управления мобильным агророботом (фиг.5) дополнительно содержит блок 117 вычисления мощности с учетом угла склона, блок 118 сравнения толкающей силы с нулем, блок 119 вычисления мощности с уче- том толкающей силы знака плюс и блок 120 вычисления мощности толкающей силы с знаком минус, блок 121 формирования сигнала торможения.
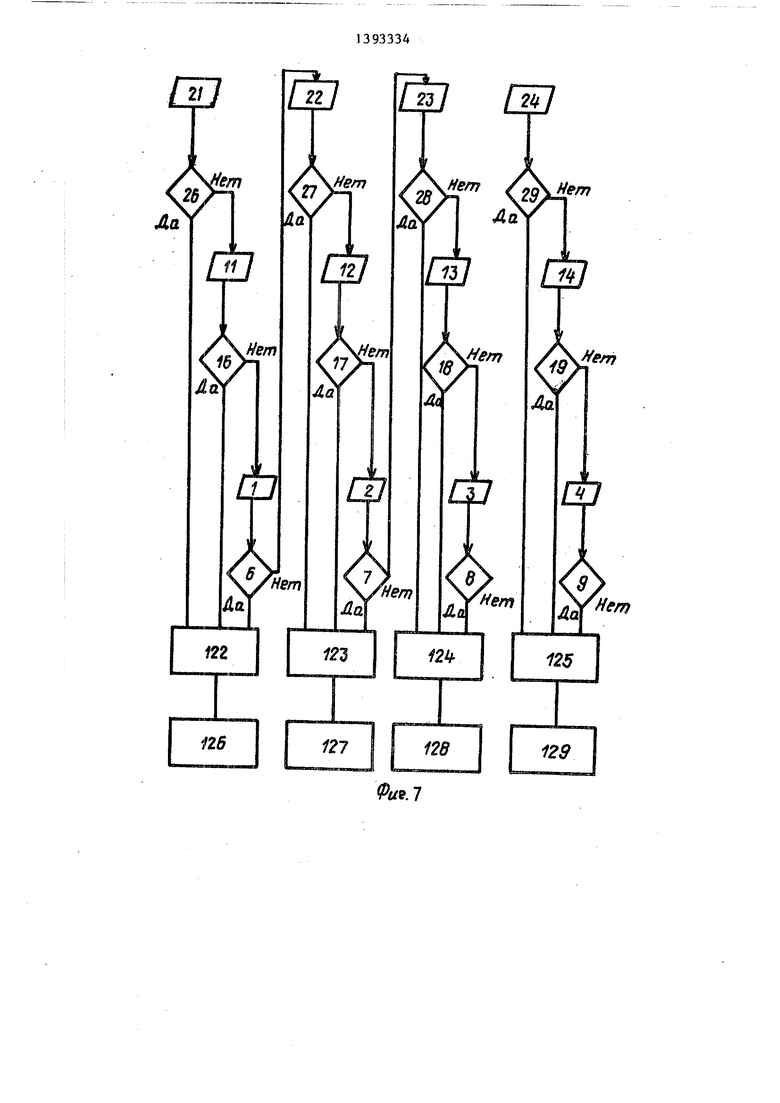
Способ формирования сигналов для получения целевой траектории (фиг.1) и система для ее осуществления в соответствии с закономерной очередностью возникновения возмущений приведены на фиг.7, где имеются сумматоры 122 - 125 сигналов для стабилизации, деления потока вождения в гоне при бесконечном радиусе (R ) ив конце его.
513933346
Они снабжены регистраторами 126 - где Р , Р. движущие силы первого 129 соответственно сигналов о отаби- и второго бортов. Здесь знак плюс лиэациИ| деления потока, ошибок Траектории в гоне и в конце его.
Мощности в блоках 117 - 120 соответственно вычисляются по равенствам
берется при повороте радиусом, рав ным нулю, а минус при других значе ниях радиуса поворота.
Разности давления, ведущих моме ,тов, скоростей бортов и радиус пов рота взаимосвязаны равенствами:
N/ в Ор R{P+PP +G3inpsinai);
Hj Юр R(P - Р - Gsin|3sinei).;
N Q iR(P-(Pp-Gsinpsin6i),
где Qj, - скорость поворота;
R - радиус поворота;
Р - касательная сила; Рр - реактивная сила;
G - сила тяжести;
Р - угол склона;
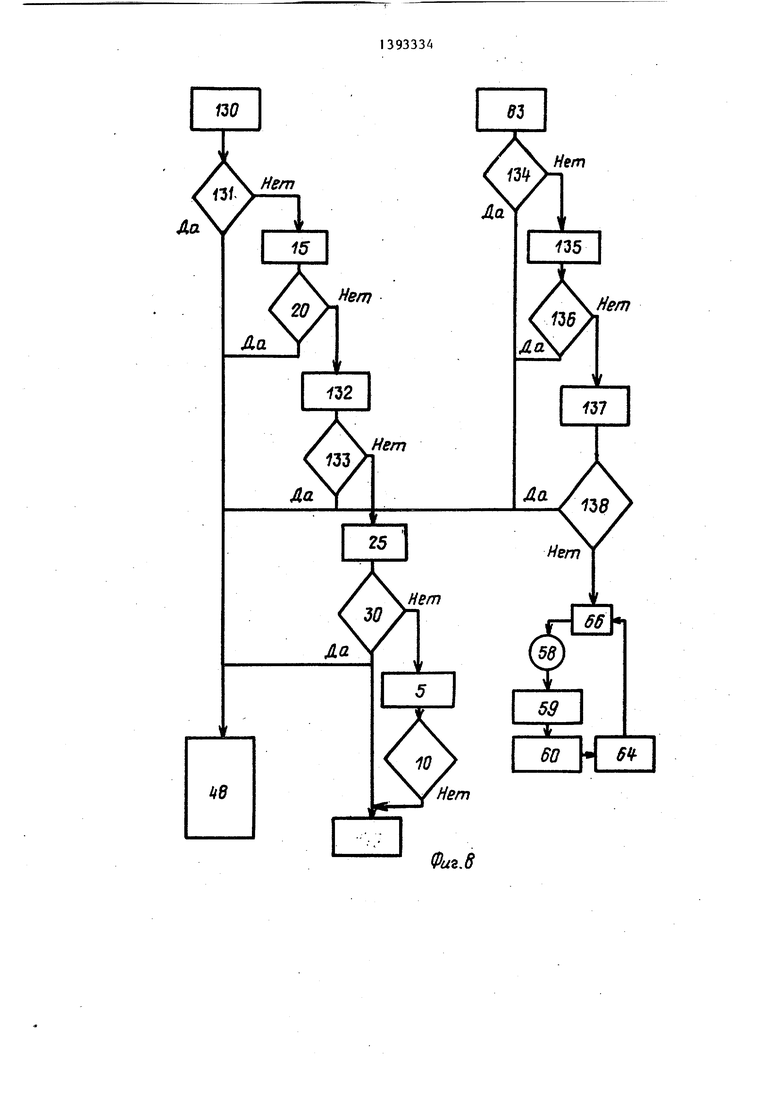
ei - угол поворота. Алгоритм действия системы и закономерная основа способа регулирования скорости с учетом ее связи с углом крутизны склона, кривизны и радиуса поворота, нагрузки, ускорений в графической интерпретации представлен на фиг.8, где блоками 130 и 131 соответственно осуществляется слежение за нагрузкой и формирование сиг- нала путем сравнения целевого и текущего значений и вычисления их разницы, 15 и 29 - ускорений, 132 и .133 - ускорений вращающихся деталей, 25 и 30 - момента нагрузки, 5 и 10 - -83 и 134 - боковой силы, 135 и 136 - угла поворота, 137 и 138-ради са повррота.
Закономерность регулирования скорости в период поворота характеризуется уравнением
VAV : R/B,
где V - AV R ,средняя скорость; разность скоростей бортов; радиус поворота; В - щирина колеи.
Двоякое: влияние буксования и сколжения движителей на радиус поворота характеризуется равенством
AV V, (, ) - , ),
где V,, V - теоретические скорости
движителей одной оси; 5, ,2- коэффихщенты буксования со знаком минус и скольжения со знаком плюс. Поворачивающий момент
Mn В(Р. ± Pj,,
где Р , Р. движущие силы первого и второго бортов. Здесь знак плюс
5
0
g
5
0
берется при повороте радиусом, равным нулю, а минус при других значениях радиуса поворота.
Разности давления, ведущих момен- ,тов, скоростей бортов и радиус поворота взаимосвязаны равенствами:
ЛР ДМ/ГГг 1, йМ (AV-Q/g0)/Ci
SV VB/R Q/g - ДМ/Ci R VB/uV,
где Г - площадь поршня гидромапшны; г - плечо силы давления; - КПД гидромашины; Q - подача (расход) гидромашины; g - объем рабочих полостей гид- ром ашины;
С - жесткость привода. Принцип и закономерность формирования сигналов в формирователях имеет .аналитическую основу
oL oi, ±Aoi; Y l(o/±&oi),
где bL - текущее значение курсового
угла; . od, - целевое значение курсового
угла; Aoi,разница между целевым и текущим значениями; Y - текущее значение линейного
отклонения от траектории; 1 - смещение датчика от кинемати- 5 ческого центра.
Угловое и линейное значения параметров связаны равенством
Y Ssinoi-b V| sinoi dt V(l+t),
0
0 где S - пройденный путь;
об - угол поворота рамы; t - время движения. Двоякое влияние внешних условий на формирование режима работы харак- 5 теризуется равенством
Q
Р Р 4 Gsin«i. sinp cosiki.
где Р - сопротивление движению, инерции нагрузки; G - сила тяжести; еб - угол поворота; а - продольная координата
центра масс.
Устройство, реализующее способ, работает следующим образом.
Датчики 1-5 разнрсти опорных реак ций (фиг. О от крена, ведущих моментов, курса, угла поворота в конце
гона и скорости вьщают интегрированную информацию об изменении внещних условий о Сигналы датчиков 1-5 сравниваются с целевыми значениями в формирователях 6- 10,и на выходах Да формируются сигналы для выравнивания реакций, деления потока энергии, регулирования курса при движении в гоне и в конце его и регулирования скорости. На выходах Нет формируются команды для слежения за условиями на следующем уровне и получения информации о б изменении крутизны склона - блок 11, ускорений бортов - блок 12, курса - блок 13, радиуса поворота - блок 14, ускорения - блок 15. Эта информация вводится в формирователи 16-20 соответствующих сигналов.
Направляющие колеса 36 и 44 управляются объемным рулевым управлением с гидромашинами 37 и реагируют на бо- новую реакцию почвы и выдают сигнал о нарушении целевой траектории. Сигнал в виде разности давлений или угла поворота от датчика 43 вводится в блок 66, куда поступает информация
to и от полозка 61, датчика 64. угла поворота и от датчика разности давлений через связь 65. Блок 66 управления формирует команду для управления распределителем 56 у гусеничного аг15 роробота и у колесного, где возможно управление известным способом и направляющими колесами. При ручном управлении команды от руля 52 поступают в блок 66 и гидронасос 54, рабочие
с выходов Да, которых сигнал о раз- 20 полости которого регулируются рулем.
Одновременно команда тягой 55 подается распределителю 56. Поворот осуще.- ствляется направляющими колесами и гидромашиной 58 дифференциала 59 взаимно противоположным вращением движителей 60 ведущей оси. Сигналы для стабилизации опорных реакций вы- рабатьшаются датчиком 41 в виде поворота передней оси относительно зад25
нице между целевым и текущим значениями используется для управления в сторону -устранения сигналов. С выходов Нет подается команда датчиком 21 - 25 для слежения за условиями на более высоком уровне: угловым ускорением, различием скоростей, линейным отклонением, боковой силой, моментом нагрузки. Информация датчиков 21 - 25 вводится с выходов Нет во входы зо формирователей 26 - 30 сигналов, даю,щих соответственно с выходов Да сигнал о разнице между целевым и текущим значениями: ускорений, скоростей, отклонения, боковой силы и мо-- мента нагрузки для устранения этих сигналов после компенсации погрешностей путем ввода выходного сигнала обратным знаком на вход. Стабилизатор 31, делитель 32 потока знергии, автоводитель 33 в гоне и при повороте, регулятор 34 скорости объекта управления . На выходах Да блоков
6-10 сигналы можно суммировать с сигналами на выходах Да блоков .с 16,17,18,19,20,26,27,28,29,30. На выней, датчиком 76 крена и от гибкой
35
40
упругой тяги 67 о перераспред елении опорных реакций от разности деформаций упругих подвесок 70 рамы 71. Всякое изменение положения передней оси 38 при копировании неровностей, положения рамы, относительно которой гибкая тяга 67 и маятник 76 поворачиваются, сопровождается сигналом в блок 73 управления распределителем 74 подачи жидкости в гидроцилиндр 75 перемещения звеньев 42 параллелограммно- го механизма передней оси относительно задней до устранения погрешности и сигнала. При движении поперек склона с правым наклоном передний мост перемещается вправо, а на левом склоне - влево. Передний мост перемещается в сторону догруженного борта до вьфавнивания опорных реакций бортов. Очередность использования сигналов определяется настройкой при эксплуатации. Сигналы можно фиксировать известной фиксирующей аппаратурой.
ходах Нет блоков 6,7,8,9,10,16,17, 18,19,20 формируются сигналы для слежения за параметрами следующего уровня, с выходов Нет блоков 26 - 30 подается сигнал о.неуправляемом устойчивом режиме работы агроробота, когда погрешности, вносимые внешними условиями, находятся в пределах нечувствительности датчиков.
Вариант системы управления мобильным агророботом (фиг.2) работает следующим образом.
, 933348
Направляющие колеса 36 и 44 управляются объемным рулевым управлением с гидромашинами 37 и реагируют на бо- новую реакцию почвы и выдают сигнал о нарушении целевой траектории. Сигнал в виде разности давлений или угла поворота от датчика 43 вводится в блок 66, куда поступает информация
to и от полозка 61, датчика 64. угла поворота и от датчика разности давлений через связь 65. Блок 66 управления формирует команду для управления распределителем 56 у гусеничного аг15 роробота и у колесного, где возможно управление известным способом и направляющими колесами. При ручном управлении команды от руля 52 поступают в блок 66 и гидронасос 54, рабочие
25
зо
ней, датчиком 76 крена и от гибкой
о
с
5
0
упругой тяги 67 о перераспред елении опорных реакций от разности деформаций упругих подвесок 70 рамы 71. Всякое изменение положения передней оси 38 при копировании неровностей, положения рамы, относительно которой гибкая тяга 67 и маятник 76 поворачиваются, сопровождается сигналом в блок 73 управления распределителем 74 подачи жидкости в гидроцилиндр 75 перемещения звеньев 42 параллелограммно- го механизма передней оси относительно задней до устранения погрешности и сигнала. При движении поперек склона с правым наклоном передний мост перемещается вправо, а на левом склоне - влево. Передний мост перемещается в сторону догруженного борта до вьфавнивания опорных реакций бортов. Очередность использования сигналов определяется настройкой при эксплуатации. Сигналы можно фиксировать известной фиксирующей аппаратурой.
Нагрузочно-скоростной режим работы агроробота формируется по сигналам об изменении нагрузки датчиком 81 в виде тормоза, лента которого подпружинена пружиной 80, управляемой рычагом 78, а рычаг 82 регулиру
0
10
15
20
25
т натяжение гибкой тяги 84 управлеия коробкой 46 скорости. При увеличении нагрузки рычагом 82 снижается скорость. При снижении Нагрузки скорость возрастает, как это происходит в известной системе регулирования, с той лишь разницей., что крен маятника 76 в любую сторону (вправо, влево) усиливает; натяжение тяги и сни жает скорость лропроционально боковой силе, крену, центробежной силе и радиусу поворота. Когда маятник 76 располагается в среднем положении снижения скорости не происходит.
Таким образом, рс агируя на боковую силу, радиус поворота, маятник 76 корректирует скорость движения до условия обеспечения безопасности. Критическая скорость безопасности характеризуется равенством
V я -,|9,8 RB/ 2h ,
где R - радиус поворота; В - ширина колеи5 h - высота центра тяжести. Алгоритм определения режима работы (тяговый, нейтральный, тормозной) осуществляется в соответствии с фиг.З. Блоки 92 94 вводят информацию на вход блока 95 для формирования знака и вычисления блоками 96 и 97 момента нагрузки, который сравнивается в блоках 99, 101 и 102 с моментамисопротивления и привода утилизатора энергии толкающей силы, при переходе пределов которого вступает в действие тормоз. Принцип торможения определяется с учетом ускоений, вычисленных блоком 107, формирователем 108 сигнала, выход Да которого дает сигнал торможения с проверкой бокового сцепления в блоке
105 или вычисления скорости блоком 109 сравнения ее с критической в блоках и 111. Блок 106 вычисления упреждения торможения включается для исследования.
Блок 1 12 сравнения Ц€;нтробежной силы с силой бокового сцепления движителей с почвой и блок 111 сравнения текущей скорости (блок 109) с критической (блок по) формируют сигнал Авария блоком 115.
Закономерность возникновения возмущений, погрешностей и сигналов в графической интерпретации представлена на фиг.7, отличаю1(аяся от фиг.1 наличием переходов между блоками 6 и
30
35
40
45
50
22,7 и 23 для указания на причинно- следственные связи факторов местности при формировании траектории и режима нагрузки. С выходов Да блоков 6,7,8,9,16,17,18,19 и сравнения информацию можно ввести в усилительно- исполнительные элементы или в сумматоры 122 - 125 сигналов для фиксации регистрирующей аппаратурой 126.- 129. С выхода Нет блоков 6,7,8,9, 16,17,18,19 сравнения сигналы поступают в сигнализатор неуправляемого (невозмущенного) движения, характеризующий условия минимизации-погрешностей местности. При отсутствии необходимости в многоуровневом контроле условий целесообразно исключить несущественные возмущения и контролировать параметры, дающие интегрированную информацию и накопленную ошибку регулируемого параметра5 что форми / руется с запаздьшанием и характерно для низкоскоростных режимов. Накопленной ошибкой и интегрированной информацией является изменение опорных реакций для стабилизатора, линейное отклонение от целевой траектории в гоне и изменение радиуса поворота в конце его, скорости движения при регулировании нагрузочного режима и скорости в тормозном режиме. Вычисление мощности в блоках 117,119 и 120 и сравнение мощности с нулем в блоке 121 для перехода в тормозной режим отличается от процессов определения моментов с той лишь разницей, что учет скорости п6вьш1ает ценность информации. Работа переключателей, подъемников полозка и орудий, настройки средств.на целевую информацию в различных условиях осуществляется известными способами.
5
0
Формула изобретения
Способ управления мобильным агро- роботом, включающий измерение отклонений от курса и базовой линии в гоне, вождение мобильного агрегата по сигналу об отклонении его от курса и базовой линии в гоне, поворот мобильного агрегата в конце гона, измерение скорости движения, ведущих моментов и опорных реакций движителей, регулирование скорости и-ведущих моментов, а также стабилизацию опорных- реакций движителей по результатам полученной
n
информации, отличающийся тем, что, с. целью повьпнения надежности управления, процессы вождения в гоне,-повор ота в конце гона, регулирования скорости движения, ведущих маментов и опорных реакций согласовы139
сы139333412
вают, фиксируют очередность возникновения информации и величину накопленной ошибки, определяют упреждающую информацию и осуществляют управление с учетом упреждающей информации и величины сигнала о накопленной ошибке.
Нет
Нет
Zk
Фи.1
Bf
Фи.2
( Ииуало )
97
M M-fJQH
f eu/77paji I -Г1 14i I
ffO3HOU
1 L. J
S fpu.3
СО
ио1
со
U02
со
т
I Мд
1
МО:}
ОУ
со
at.S
V
X .
...
/
4 «-4M«tir« l
.« ««; ff
ет
Нет
Фиг,6
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
