10
Изобретение относится к манииуляторам и промышленным роботам и может быть использовано в различных областях машиностроения при автоматизации технологических процессов, в частности в сборочном производстве.
Цель изобретения - расширение технологических возможностей захвата промышленного робота путем автоматической переналадки на зажим заготовки различной тол- шины параллельными губками в процессе работы с использованием одного привода для подвода захвата к заготовке и ее зажима.
На фиг. 1 схематически показан захват промышленного робота, обший вид; на 15 фиг. 2 - разрез А-А на фиг. 1.
Захват промышленного робота содержит корпус, выполненный в виде ш,ек 1 и 2, скрепленных между собой фланцем 3. На корпусе выполнен продольный (вдоль оси захвата) паз 4. На оси 5 закреплены две пары двуплечих рычагов 6-9. Ось 5 двуплечих рычагов 6-9 выполнена с возможностью возвратно-поступательного перемешения вдоль паза 4. Плечи 10 рычагов 6-9 выполнены со скосами. Толкатель новленный на штоке 12 приводного механизма (например пневмопривода, не показан), выполнен с возможностью взаимодействия с упомянутыми скосами. На других плечах двуплечих рычагов 6-9 на осях 13 шарнирно закреплены зажимные рычаги 14 с губками 15, разжимаемые пружиной 16. На плечах 17 зажимных рычагов 14 выполнены скосы. На концах скосов плеч 10 двуплечих рычагов 6-9 выполнены уступы 18. Оси 13 зажимных рычагов 14 выполнены с возможностью перемешения по наружным поверхностям шек 1 и 2 корпуса захвата. Толкатель 11 приводного механиз.ма выполнен с возможностью взаимодействия как со скосами плеч 17 зажимных рычагов
верхностям шек 1 и 2. Дойдя до конца паза, ось 5 останавливается, концы двуплечих рычагов с осями 13 и зажимными рычагами 14 начинают сжиматься, так как закон- 5 чились поверхности шек 1 и 2. Наличие пружины 16 и скосов плеч 17 зажимн ых рычагов 14, взаимодействуюших с толкателе.м 11 в процессе его движения, обеспечивает параллельное сжатие зажимных губок, а следовательно, и захват заготовок различной толшины параллельными губками.
При перемещении штока 12 вправо пружина 16 разжимает зажимные рычаги 14, обеспечивая путем взаимодействия скосов плеч 17 зажимных рычагов 14 с токателем 11 их параллельное перемешение. После полного раскрытия зажимных рычагов 14 при дальнейше.м движении штока 12 вправо вследствие взаимодействия толкателя 11 с уступами 18 двуплечих рычагов 6-9 происходит отвод захвата в первоначальное
20
положение.
Формула изобретения
Захват промышленного робота, содер- уста- 25 жаший корпус с выполненным вдоль его
30
35
оси пазом, закрепленные на оси двуплечие рычаги, на одних из плеч которых закреплены зажимные рычаги с губками, а на других выполнены скосы, и приводной механизм с толкателем, отличающийся те.м, что, с целью расширения технологических возможностей, ось крепления двуплечих рычагов установлена в пазу корпуса с возможностью возвратно-поступательного пере.ме- шения, при этом оси крепления зажимных рычагов к двуплечим рычагам установлены с возможностью взаимодействия их с наружными поверхностями корпуса захвата, а толкатель привода имеет возможность взаимодействия со скосами соответствую- ших плеч как двуплечих рычагов, так и со
14, так с уступами 18 двуплечих рычагов 40 скосами зажимных рычагов, при этом
, - (Ri-rR).
6-9.
Захват промышленного ротоба работает следуюшим образом.
В исходном положении зажимные рычаги 14 под действием пружины 16 находятся в раскрытом положении. При перемеше- нии штока 12 влево толкатель 11 приводного механизма, воздействуя цилиндрическими поверхностями на скосы плеч 10 двуплечих рычагов 6-9, перемешает их. Ось 5 скользит при этом по пазу 4, а концы осей 13 с зажимными рычагами 14 - по по0
5
верхностям шек 1 и 2. Дойдя до конца паза, ось 5 останавливается, концы двуплечих рычагов с осями 13 и зажимными рычагами 14 начинают сжиматься, так как закон- чились поверхности шек 1 и 2. Наличие пружины 16 и скосов плеч 17 зажимн ых рычагов 14, взаимодействуюших с толкателе.м 11 в процессе его движения, обеспечивает параллельное сжатие зажимных губок, а следовательно, и захват заготовок различной толшины параллельными губками.
При перемещении штока 12 вправо пружина 16 разжимает зажимные рычаги 14, обеспечивая путем взаимодействия скосов плеч 17 зажимных рычагов 14 с токателем 11 их параллельное перемешение. После полного раскрытия зажимных рычагов 14 при дальнейше.м движении штока 12 вправо вследствие взаимодействия толкателя 11 с уступами 18 двуплечих рычагов 6-9 происходит отвод захвата в первоначальное
0
положение.
0
5
оси пазом, закрепленные на оси двуплечие рычаги, на одних из плеч которых закреплены зажимные рычаги с губками, а на других выполнены скосы, и приводной механизм с толкателем, отличающийся те.м, что, с целью расширения технологических возможностей, ось крепления двуплечих рычагов установлена в пазу корпуса с возможностью возвратно-поступательного пере.ме- шения, при этом оси крепления зажимных рычагов к двуплечим рычагам установлены с возможностью взаимодействия их с наружными поверхностями корпуса захвата, а толкатель привода имеет возможность взаимодействия со скосами соответствую- ших плеч как двуплечих рычагов, так и со
косами зажимных рычагов, при этом
де
, - (Ri-rR).
L -расстояние между торцом корпуса захвата и пазом;
i - величина перемешения по пазу оси крепления двуплечих рычагов;
i - .межцентровое расстояние оси зажимных рычагов и ближайшей к ним поперечной оси паза;
R, -радиус оси крепления двуплечих рычагов;
Rg -радиус оси крепления зажимных рычагов.
Г
fl
Фиг.1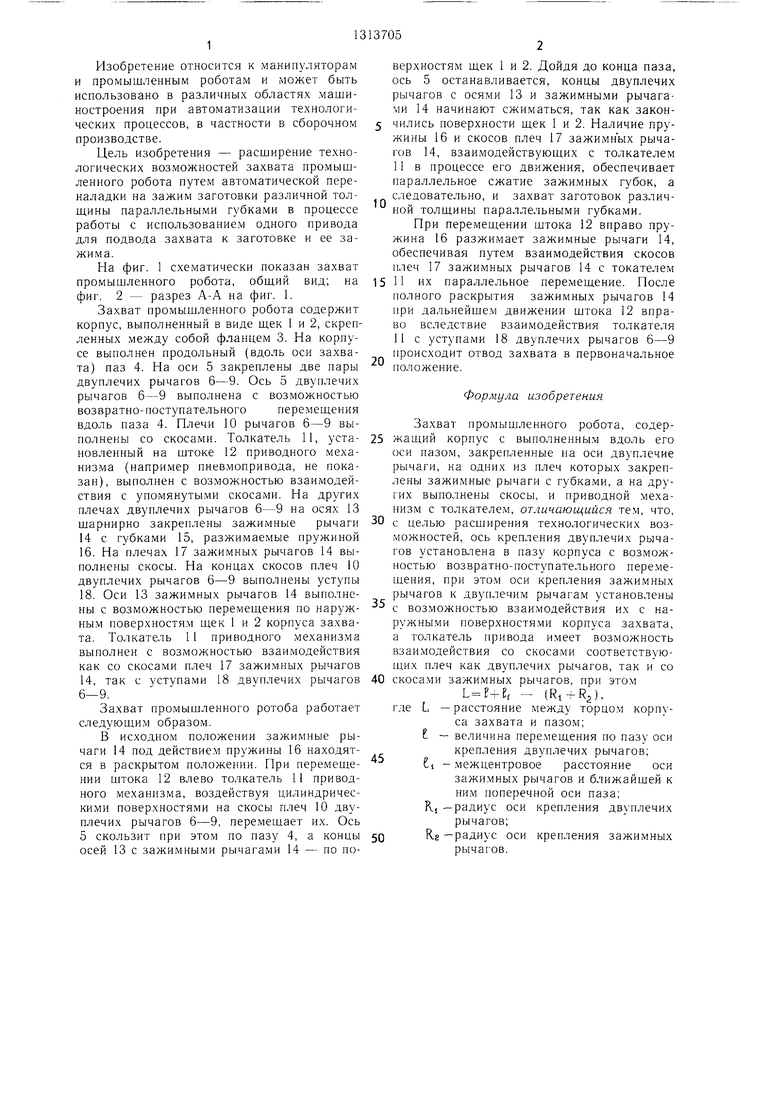
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1979 |
|
SU848353A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Механизированное устройство станка для установки ступенчатого вала | 2023 |
|
RU2811775C1 |
| Наладка тисков | 1989 |
|
SU1703442A1 |
| Захватное устройство | 1991 |
|
SU1813622A1 |
| Устройство к штампу для подачи длинномерных заготовок | 1982 |
|
SU1080906A1 |
| Устройство для мерной резки провода | 1981 |
|
SU1134266A1 |
| Устройство для формирования и закрутки петли на проводах или проволоке | 1980 |
|
SU961827A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Захват | 1981 |
|
SU984862A1 |
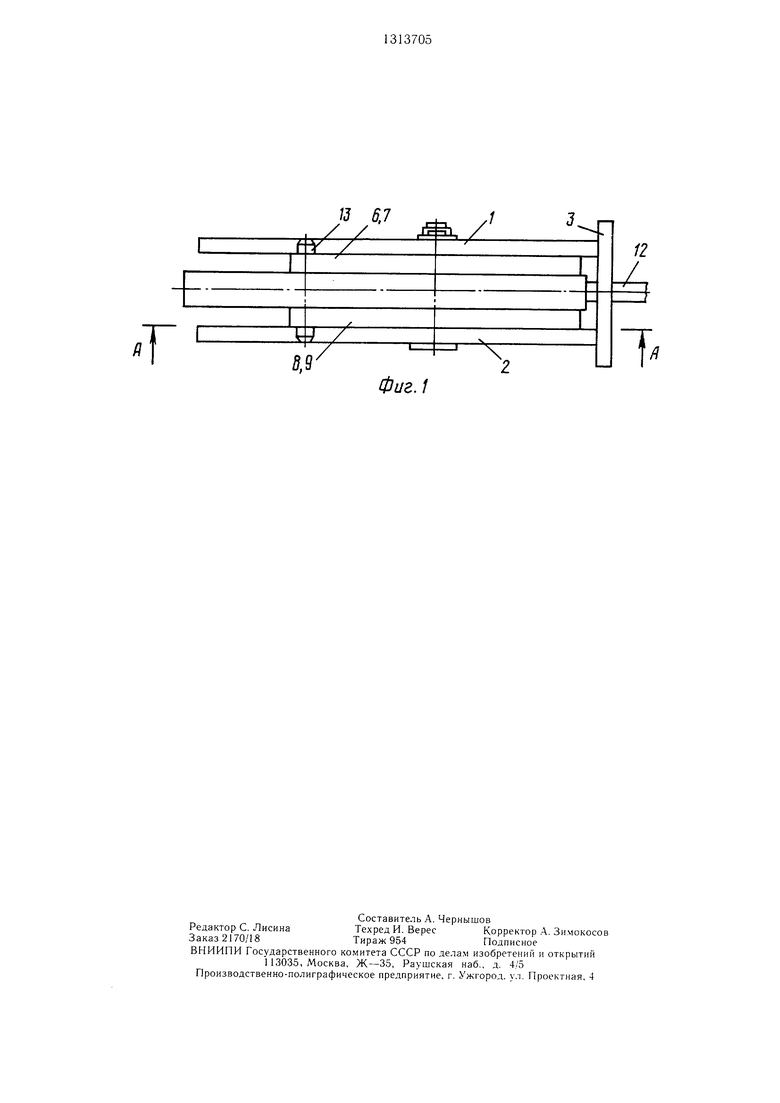
Изобретение относится к манипуляторам и промышленным роботам и .может быть использовано в различных областях машиностроения при автоматизации технологических процессов, в частности в сборочном производстве. Цель изобретения состоит в расширении технологических возможностей захвата за счет автоматической переналадки его на зажим заготовок различной толщины параллельными губками в цессе работы с использованием одного привода для подвода захвата к заготовке и ее зажима. Захват промышленного робота содержит корпус, выполненный в виде щек 1, 2 с продольным пазом 4. На оси 5 закреплены двуплечие рычаги 6-9, плечи которых выполнены с внутренней стороны со скосами и уступами 18. Ось 5 выполнена с возможностью перемещения вдоль паза 4. На осях 13 двуплечих рычагов 6-9 шар- нирно закреплены подпружиненные зажимные рычаги 14, на плечах 17 которых выполнены скосы. Оси 13 зажимных рычагов выполнены с возможностью перемещения по наружным поверхностям щек 1, 2 корпуса. Толкатель 11 приводного механизма выполнен с возможностью взаимодействия со скосами плеч 17 зажимных рычагов 14, скосами плеч 10 и уступами 18 двуплечих рычагов. 2 ил. /7-/7 6,8 5 W М IS со со о сд 7.9 7/0 Фиг. 2
| Захват промышленного робота | 1979 |
|
SU848353A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
