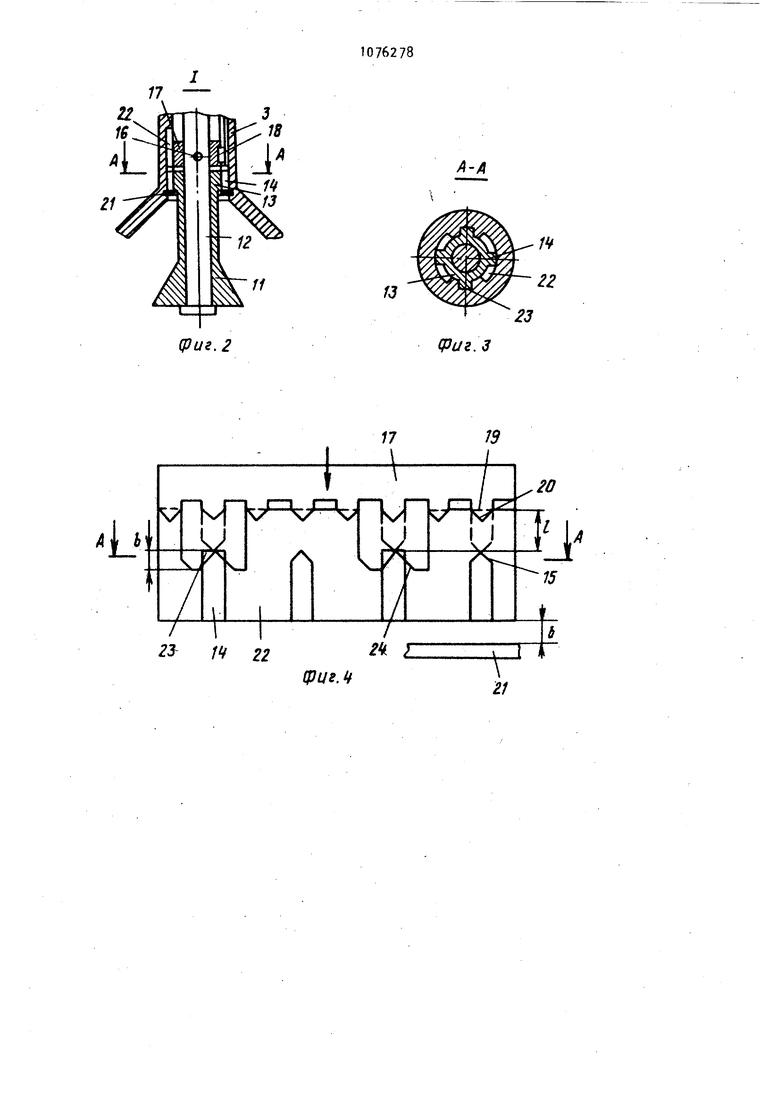
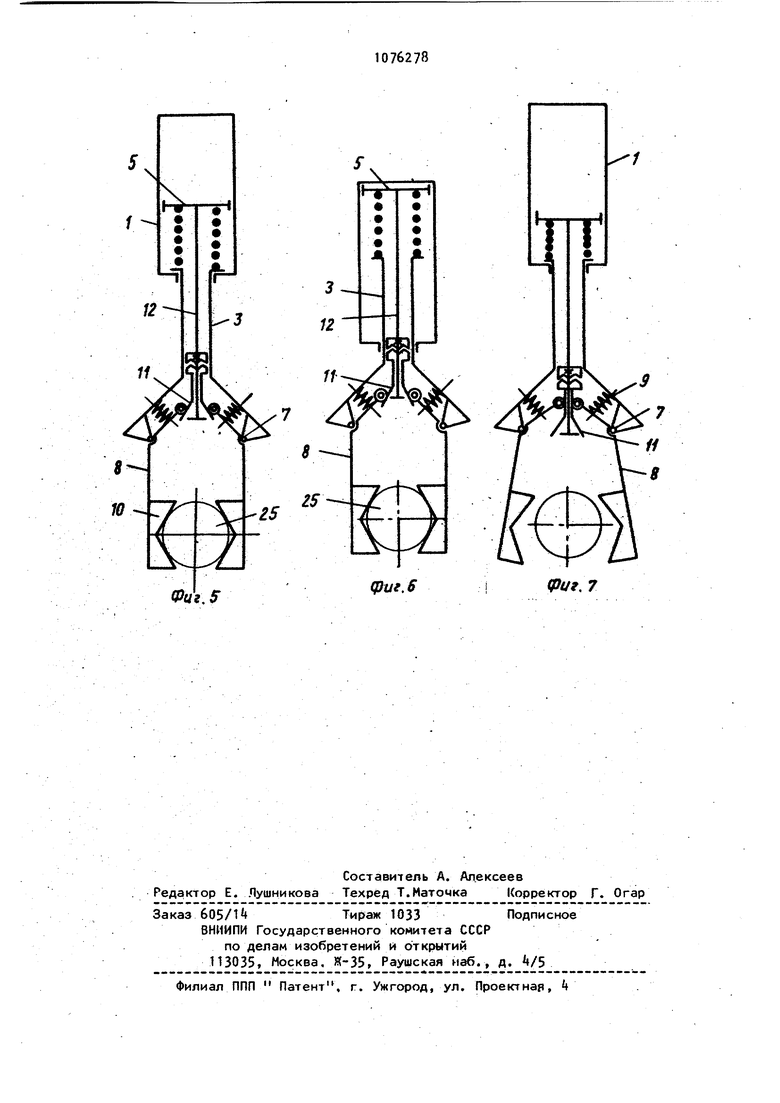
1 Изобретение относится к машиностроению, в частности к манипулятор рам и автооператорам. Известен схват манипулятора, содержащий привод, выполненный в виде силового цилиндра, двуплечие рычаги на одном конце которых закреплены за чимные губки, а другое плечо пред назначено для взаимодействия с клином, причем шток силового цилиндра выполнен полым и в полости штока размещена штанга, жестко связанная с поршнем, клин связан с поршнем посредством.зубчатой муфты, первая полумуфта которой жестко связана со штангой Л . Недостатком манипулятора являютс сложность конструкции и низкая надежность работы. Цель изобретения - упрои ение кон струкции и повышение надежности раб ты. Поставленная цель достигается тем, что схват манипулятора, содерж щий привод, выполненный в виде силового цилиндра, двуплечие рычаги на одном плече которых закреплены зажимные губки, а другое плечо пред назначено для взаимодействия с клином, причем шток силового цилиндра выполнен полым и в полости штока размещена штанга, жестко связанная с порижем, клин связан с поршнем посредством зубчатой муфты, первая полумуфта которой жестко связана со штангой, при этом на внутренней поверхности штока выполнены пазы ра ной длины, предназначенные для взаи модействия с зубьями обеих полумуфт зубчатой муфты, вторая полумуфта же стко связана с клином, количество зу бьев этой полумуфты в два раза меньше количества зубьев первой полумуфты, кроме того .шток силового цилиндра подпружинен относительно поршня, а клин размещен на штанге с возможностью вращения. На фиг. 1 изображена кинематическая схема предлагаемого схвата; на фиг. 2 - узел 1 на фиг. 1; на фиг. 3 сечение Л-А на фиг. 2 и k; на фиг. k развертка внутренней поверхности штока с совмещением зубьев клина и зубьев кольца; на Фиг..5 положение схвата при зажиме детали; на фиг. 6 - втянутое положение схвата; на фиг. 7 выдвинутое положение схв та при укладке детали. 78 Схват манипулятора содержит силовой цилиндр 1, в крышке 2 которого монтирован шток 3. Шток имеет возможность перемещения в крышке, но не имеет возможности вращения. Шток 3 поджат пружиной к поршню 5 цилиндра и на одном конце имеет бурт 6, ограничивающий выдвижение штока из цилиндра. На другом конце штока 3, на раструбе на осях 7 смонтированы изломанные двуплечие рычаги 8, подпружиненные пружинами 9 к штоку 3. На концах двуплечих рычагов 8 смонтированы губки 10, другой конец двуплечих рычагов взаимодействует с } лином 11 , который смонтирован на штанге 12 силового цилиндра с возможностью врацения. Клин 11 снабжен цилиндрическим кольцом 13. на наружной поверхности которого выполнены зубья 1 со скосами 15 (Лиг. 4), на торцах образующие вторую полумуфту. За клином 11 на штанге 12 штифтом 16 зафиксирована первая полумуфта 17, поворот которой вместе со штануой в штоке 3 ограничивает шпонка 18. На полумуфте 17 выполнены торцовые зубья 19, имеющие скосы 20, Выдвижение клина 11 из штока 3 ограничивается пружинным кольцом 21, в которое упирается торец цилиндрического кольца 13. На внутренней поверхности штока 3 выполнены продольные пазы 22 и 23, в которые входят продольные зубья , Количество зубьев 19 на торце полумуфты 17 выбрано четным, например, восемь, и их ширина равна расстоянию между ними, а количество зубьев 1 у цилиндрическо-го кольца 13 в два раза меньше. т.е.Четыре, и их ширина равна ширине зуба кольца. При этом зубья расположены равномерно по окружности. Пазы 22 и 23 на внутренней поверхности штока 3 выполнены разной длины, при этом пазы 23 выполнены меньшей длины и их ширина равна ширине зубьев 1 клина 11 и они расположены диаметрально противоположно (фиг. З) Длина пазов 22 больше и их ширина выполнена на четверть окружности. Разница длин 1 пазов 22 и 23 выбрана, исходя из наибольшего возможного поворота.двуплечих рычагов 8, т.е. хода клина 11. Торцы пазов имеют скосы 2Ц, ответные скосам зубьев 1А. Схват манипулятора работает следующим образом. 3 Видвижение схвата для зажима де лей 25 происходит при подаме рабоч среды в поршневую полость силового цилиндра 1. При этом происходит выдвижение штока 3, перемещается п шень 5 и через пружину Ц перемещает шток 3 до упора бурта 6 в крышку 2. При дальнейшем перемещении поршня 5 происходит сжатие пружины k и штанга 12 вместе с полумуфтой 17 и клином 11 перемещается относительно штока 3 до упора торца цилиндрического кольца 13 клина 11 в пружинное кольцо 21. При этом зубья 14 выходят из лазов 23 и под действием скосов 20 зубьев 19 и скосов 15 зубьев 14 клин 11 разворачивается на штанге 12 на половину ширины выступа. Зажим детали 25 и втягивание захвата происходит при подаче среды в штоковую полост (под поршень 5) силового цилиндра 1 (обратное перемещение механизма) при этом под действием скосов 24 клин 11 разворачивается на штанге 12 на оставшуюся половину ширины зуба 14 и все зубья 14 размещаются по ширине пазов 22. При дальнейшем перемещении поршня 5 клин 1 со штангой 12 будет свободно перемещаться в штоке 3. При этом под действием клина 11 начнут разворачиваться двуплечие рычаги 8 относи тельно осей 7 и губками 10 произведет ся зажим детали 25 (фиг. 5). Дальнейшим перемещением поршня происходит втягивание механизма с зажатой деталью 25. При этом начинает втягиваться шток 3 в цилиндр совместно со штангой 12, так как происходит заклинивание клина 11 под действием двуплечих рычагов 8 и зажатой детали 25 ()иг, f) . Выдвижение захвата и разжим детали происходит при подаче рабочей среды в поршневую полость силового цилиндра 1. При этом взаимодей78ствие механизмов соответствует выдвижению захвата для зажима детали, но в конце выдвижения происходит разжим детали за счет того, что клин 11 перемещается до упора в пружинное кольцо 21 и двуплечие рычаги 8 разворачиваются на осях 7 под действием пружин 9 (фиг. 7). В конце выдвижения зубья 14 клина. 11 также поворачиваются на один шаг, как и при выдвижении захвата для зажима детали, но при этом зубья 14 попадают в короткие пазы 23. Втягивание захвата с развернутыми рычагами 8 (фиг. 1) происходит при подаче рабочей среды в штоковую полость силового цилиндра 1. При этом взаимодействие механизмов соответствует втягиванию захвата с зажатой деталью, но рычаги 8 не разворачиваются за счет того, что зубья 14 упираются в уступы коротких пазов 23 (фиг. 4) и клин 11 не перемещается. Таким образом, происходит повторение циклов: выдвижение захвата, зажим детали втягивание захвата, выдвижение захвата после перекоса детали на другую позицию, разжим детали, втягивание захвата и выдвижение его для зажима очередной детали. Уступ у длинные пазов 22 необходим для ограничения хода клина 11 при отсутствии зажимаемой детали 25 при цикле втягивание захвата с зажатой деталью. Использование предлагаемого схвата упрощает конструкцию исполнительных органов промышленного робота из-за объединения приводов зажима и выдвижения захвата, упрощает обслуживание робота, так как сокращается количество приводов, также упрощается управление исполнительными органами и повышается надежность.
А-А
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Схват манипулятора | 1987 |
|
SU1553378A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Гибкий производственный модуль | 1986 |
|
SU1315222A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Схват манипулятора | 1982 |
|
SU1068281A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Зажимной механизм | 1985 |
|
SU1291391A1 |

4JfJ
фиг. If
21
