1 .13
Изобретение относится к робототехнике и может быть использовано при создании сборочньк роботов-манипуляторов .
Целью изобретения является повышение надежности устройства путем формирования дополнительных управляющих воздействий на приводы манипулятора, обеспечивающих колебательньге движе-. ния исполнительного органа с задан- ной амплитудой.
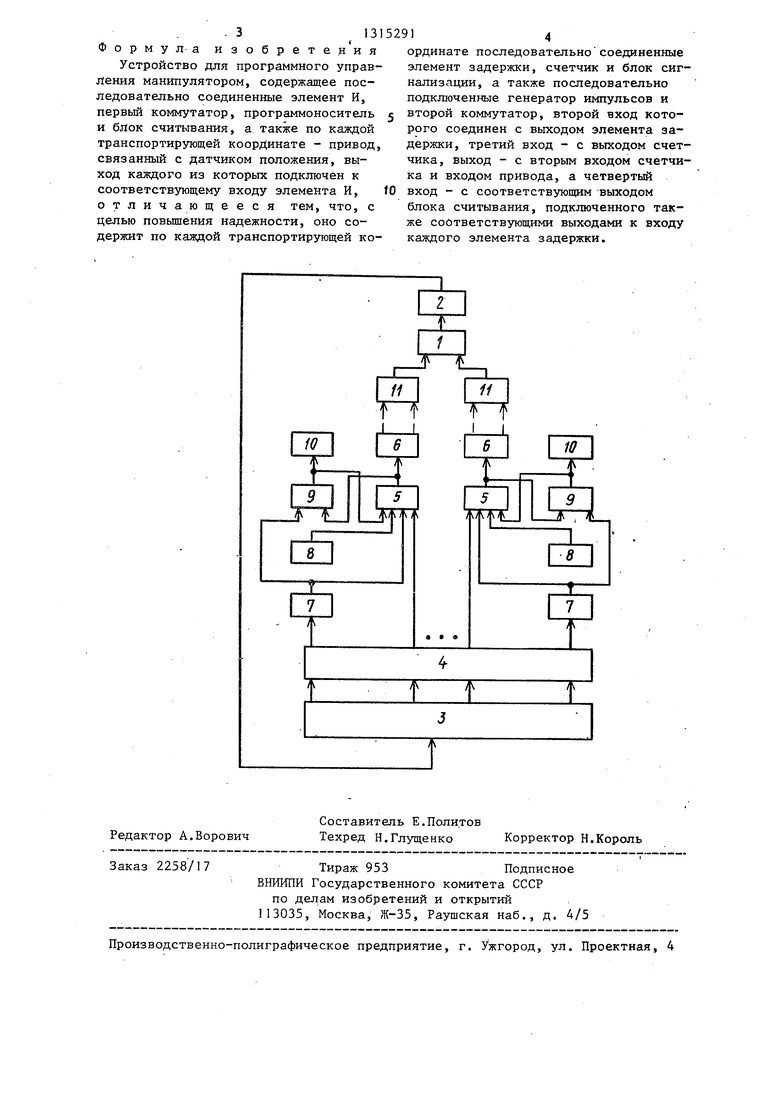
На чертеже представлено предлагаемое устройство.
Устройство включает элемент И 1, первый коммутатор 2, програг моноси- тель 3, блок 4 считывания, вторые коммутаторы 5, приводы 6, элементы 7 задержки, генераторы 8 импульсов, счетчики 9, блоки 10 сигнализации,, ,датчики 11 положения- .
Устройство работает следующим образом «
, В первом кадре программы при условии, что по каждой транспортирующей координате датчики 11 положения выдают уровни логической 1, что соответствует исходному положению приводов, на выходе логического элемента И 1 также появляется уровень логической в счетчик коммутатора 2 записывается адрес первого кадра программы. С выхода счетчика адрес в двоичном коде поступает на дешифратор., с выхода которого a :l;pec в десятичном ходе с уровнем логической 1 поступает на программоноситель 3, а именно на общие контакты переключателей, задействованных в данног. кадре программы, В зависимости от того, в каком положении находятся переключатели, уровень логической 1 попадает на один из входов RS- триггеров блока 4 считывания, устанавливая их в единичное или нулевое состояние. Эта информация через дополнительный коммутатор 5 поступает
на привод 6 запрограммированной координаты о Привод 6 начинает движение и с датчика 11 положения поступает сигнал С уровнем логического О, который через элемент И 1 поступает на вход счетчика кo шyтaтopa 2, блокируя его работу. После окончания движения привода 6, т.е. выхода исполнительного органа манипулятора в запрограммированную координату, с выхода датчика 11 положения вторично
5291;
появляется сигнал с уровнем логической 1 и в счетчик коммутатора 2 добавляется единица, эквивалентная адресу второго кадра программы. Если
g же сигнала от датчика 11 положения с уровнем логической 1 не поступит в конце движения привода 6, то это означает, что манипулятор не доставил деталь, находящуюся в схвате, в
fD требуемую точку- пО причине отклонения в размере или форме собираемых деталей, но находящихся в пределах допусков. В-этом случае при условии, что и в данном кадре программы запрог15 раммировано включение блока 7, происходит следующее.
Блок 7 расчитан на выдачу управляющего сигнала в том случае, если
20 за время, отведенное на вьтолнение позиционирования манипулятором, не произошло смены кадра программы, что эквивалентно невыполнению позиционирования. Тогда уровень логической
25 1 с выхода блока 7 попадает на
вход коммутатора 5, в результате чего, на выходе коммутатора 5 появляются сигналЕ 1 импульсной формы, которые поступают с генератора 8 через
30 второй информационный вход коммутатора 5. Одновременно с подачей сигнала на первый адресный вход коммутатора 5 на входе установки в О счетчика
9появляется сигнал разрешения на
прием импульсов, поступающих на привод 6, В случае, если колебательные движения исполнительного органа привели к установке собираемых цеталей на свои места,, датчик 1 1 положения
Q выдает сигнал логической 1 и отрабатывается следующий кадр программы, .при этом блок 1 по программе выдает уровень логического О, что приводит к обнулению счетчика 9 и измене 5 j-шю адреса информационного входа коммутатора 5, разрешая прохождение информации с блока 4 считываьщя. Если же по каким-либо причинам не произош ло правильной установки собираемых
Q деталей на свои места с помощью определенного количества импульсов, поступающих на привод б с генератора 8, то счетчик 9 вьщает сигнал на блок
10сигнализации, вызывая оператора, /j и прекращает поступление импульсов
на привод 6 путем изменения адреса информационного входа коммутатора 5, устанавливая на его выходе постоянный уровень.
.
Формула изобретения Устройство для программного управления манипулятором, содержащее последовательно соединенные элемент И, первый коммутатор, программоноситель и блок считывания, а также по каждой транспортирующей координате - привод, связанный с датчиком положения, выход каждого из которых подключен к соответствующему входу элемента И, отличающееся тем, что, с целью повьшения надежности, оно содержит по каждой транспортирующей коРедактор А.Ворович
Составитель Е.Политов
Техред Н.Глущенко Корректор Н.Король
Заказ 2258/17
Тираж 953Подписное
ВНИШй Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
52914
ординате последовательно соединенные элемент задержки.
счетчик и блок сиг
нализации, а также последовательно подключенные генератор импульсов и второй коммутатор, второй вход которого соединен с выходом элемента задержки, третий вход - с выходом счетчика, выход - с вторым входом счетчика и входом привода, а четвертый вход - с соответствующим выходом блока считывания, подключенного также соответствующими выходами к входу каждого элемента задержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Цикловая система программного управления манипулятором | 1976 |
|
SU621569A1 |
| Позиционная система программного управления промышленным роботом | 1977 |
|
SU732819A1 |
| Устройство для программного управления | 1981 |
|
SU1003020A1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Устройство для программного управления манипулятором | 1985 |
|
SU1324010A1 |
| Цикловая система программного управления манипулятором | 1990 |
|
SU1812100A1 |
| Шаговая система программного управления манипулятором | 1978 |
|
SU746433A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
Изобретение относится к робототехнике и может быть использовано при создании сборочных роботов-манипуляторов. Целью изобретения .является повышение надежности устройства путем формирования дополнительных управляющих воздействий на приводы манипулятора, обеспечивающих колебательные движения исполнительного ор- гака с заданной амплитудой. Устройство содержит элемент И, первый коммутатор, программоноситель и блок счи- тыва1шя, а также по каждой транспортирующей координате - элемент задержки, второй коммутатор, счетчик, генератор импульсов, блок сигнализации, привод и датчик положения. 1 ил. с (Л
| Цикловая система программного управления манипулятором | 1978 |
|
SU723512A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Цикловая система программного управления манипулятором | 1976 |
|
SU621569A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
