1
Изобретение относится к робототехнике и может быть использовано при создании позиционньк систем управления промышлешшгми роботами.
Известны позиционные системы программного управления промьшшеннымроботом, содержащие программоноситель, комм)ггатор кадров, пртенциометрический накопитель, блок команд, компаратор, сервопривод и датчик положения, имеющие низкие надежность и быстродействие, обусловленные применением в качестве программонакопителя штекерного барабана {1.
Наиболее близким техническим решением к изобретению является система, содержащая последовательно соединенные коммзтатор кадров и программоноситель, последовательно соединенные дешифратор, коммутатор накопителя и потек1щометрический накопитель, выход которого подключен к первым входам компаратора и сервопривода, связанного с датчиком положения, выход которого соединен со вторыми входами сервопривода и компаратора, выход которого подключен к первому входу блока управления, вьпсод которого соединен
со входом первого элемента задержки, второй выход дешифратора соединен через коммутатор команд, соответствующие входы которого подключены к выходам датчика команд, и через последовательно соеднне1шые блок команд и инвертор со вторым входом блока управления {2.
Недостаток системы - низкая надежность вызванная использованием в качестве программоносителя штекерных панелей н барабанов
10 с контактным считыванием программы. В случае использования в качестве программоносителя штекерного барабана сигнал на его разворот подается только после вьшолнения работы предыдущего шага программы, что С1Ш15жает быстродействие системы.
Цель изобретения - повыиюние надежности и быстродействия системы.
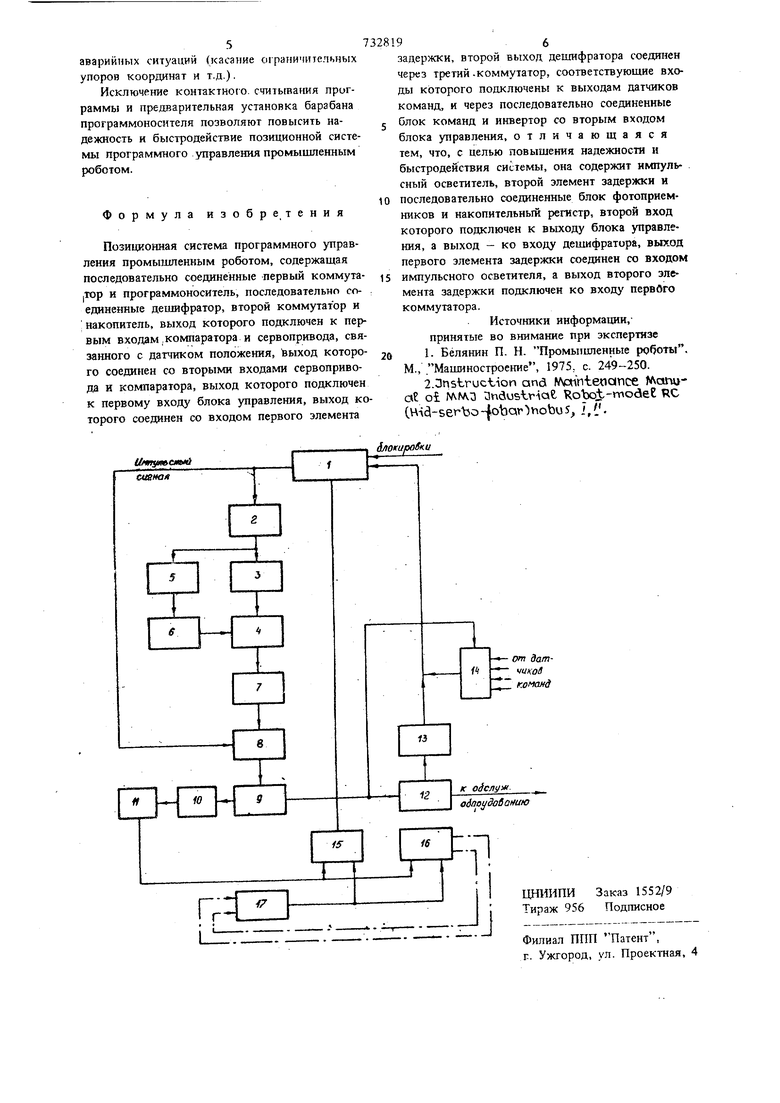
Поставленная цель достигается тем, ITO система содержит импульсный осветитель, вто20рой элемент задержки н последовательно соеданенные блок фотоприемннков и накопительный регнстр, второй вход которого подключен к выходу блока управления, а выход ко входу дешифратора, выход первого элемента .задержки соединен со входом импульсного осветителя, а выход второго элемента задержки подключен ко входу коммутатора кадров. На чертеже представлена функциональная схема системы. Система включает блок 1 управления, цервый элемент 2 задержки, импульсный осветитель 3, программоноситель 4, второй элемент 5 задержки, первый коммутатор 6, блок 7 фотоприемников, накопительный регистр 8, дешифратор 9 кадра, второй коммутатор 10, нако- , питель 11, блок 12 команд, инвертор 13, третий коммутатор 14, компаратор 15, сервопривод 16 координат, датчик 17 положения. Система работает следующим образом. Считывание кадра программы, записанной на программоносителе 4 происходит в момент подачи сигнала, сформированного в блоке 1 уп равления, через первый элемент 2 задержки на вход импульсного осветителя 3. Световой поток, создаваемый импульсньгм осветителем, про ходя через отверстие в строке программоносителя 4, преобразуется в электрические сигналы на выходе блока 7 фотоприемников. Мощность электрических сигналив зависит от величины светового потока и чувствительности фотоприемников, длительность сигналов пропорциональна длительности светового потока. С выхода блока 7 фотоприемников импульсные сигналы поступают в накопительный регистр 8, на выходе которого образуется код кадра программы в виде уровневых сигналов. Начальная установка накопительного регистра 8 осуществляется сигналом, поступающим с выхода блока 1 управления на управляющий вход регистра 8. Элемент 2 задержки на входе импульсного осветителя 3 обеспечивает необхо;димый сдвиг между фазами начальной установ.ки и записью программы в накопительном регистре 8. Установка последующего кадра программы осуществляется сигналом, поступающим с выхода первого коммутатора 6, который сдв нут по времени относительно сигнала, поступающего на вход импульсного осветителя 3. Необходимая величина сдвига зависит от времени считывания установленного кадра и обеспечивается вторым элементом5 задержки. Выполнение считанного кадра программы осуществляется параллельно: отрабатьгеаются перемещения по координатам манипулятора и технологические команды. Для этого на выходе накопительного регистра 8 включен дешиф ратор 9 кадра, на одном из выходов которого образуется единичный код, соответствующий номерам потенциометров, которые должны быт включены в потенциометрическом накопителе 11 посредством второго коммутатора 10. На другом выходе дешифратора 9 кадра образует94ся единичный код, соответствующий номеру технологической команды, которая должна быть включена в блоке 12 команд. Любой кадр программы должен содержать информацию о перемещениях по всем коорди.натам манипулятора, включая те, перемещение по которым в данном кадре не происходит. По этим координатам програмлотруется номер потенциометра, записанного в предыдущем кадре. Отсутствие такой информации воспринимается как ошибка программирования. В момент включения потенциометров в накопителе 11 на входе компаратора 15 и сервопривода 16 координат образуется разность сигналов, поступающих с выходов потенциометров и соответствующих датчиков 17 Положения. : При этом на выходе компаратора 15 разрешающий сигнал на считывание очередного кадра отсутствует до тех пор, пока на его входе не будет достигнуто совпадение указанных сигналов по всем подвижнь1м координатам. В зтот MONteHTперемещение по всем координатам отсутствует. Если в данном кадре запрограммирован номер технологической команды, то по сигналу с дешифратора 9 кадра в блоке 12 команд включается один из тиристорных ключей, соответствующий номеру команды. Сигнал с его выхода поступает на обслуживаемое оборудование или манипулятор для управления релейной электроавтоматики последних. Выполнение каждой команды контролируется соответствующими датчиками, установленными на оборудовании. Для этого одновременно с включением команды в блоке 12 команд пропадает разрещающии сигнал на входе устройства управления, а коммутатор 14 команд на вход которого подается Сигнал с выхода дешифратора 9, подключает к этому входу блока 1 управления выход с датчика, соответствующего номеру команды. Таким образом, разрещающии сигнал на вход блока 1 управления подается с выхода указанного датчика команд в тот момент, когда команда вьшолнена. В противном случае сигнал на считьшание очередного кадра не формируется. При отсутствии технологических команд в программе сигнал с выхода деишфратора 9 на блок 12 команд отсутствует, датчики команд отключены и разрешающий сигнал на вход блока 1 управления поступает с выхода инвертора 13. Считывание очередного кадра и установка последующего происходит при наличии разрешающих сигналов на всех входах блока 1 управления, включая вход блокировки, на котором исчезает разрешающий уровень в могикит
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления считыванием и вводом информации | 1990 |
|
SU1751786A1 |
| Устройство для программного управления | 1981 |
|
SU1003020A1 |
| Система программного управленияпРОМышлЕННыМ РОбОТОМ | 1978 |
|
SU807213A1 |
| Цикловая система программного управления промышленным роботом | 1980 |
|
SU935877A2 |
| Цикловая система программного управления манипулятором | 1976 |
|
SU621569A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Система контурного программного управления манипулятором | 1977 |
|
SU620368A1 |
| Устройство для программного управления манипулятором | 1985 |
|
SU1315291A1 |
