Изобретение относится к захватным устройствам промышленных роботов и может быть использовано для манипулирования ферромагнитными изделиями с низкими прочностными характеристиками, в частности выводными рамками полупроводниковых приборов.
Целью изобретения является расширение технологических возможностей за счет манипулирования с изделиями, имеющими низкие прочностные характеристики.
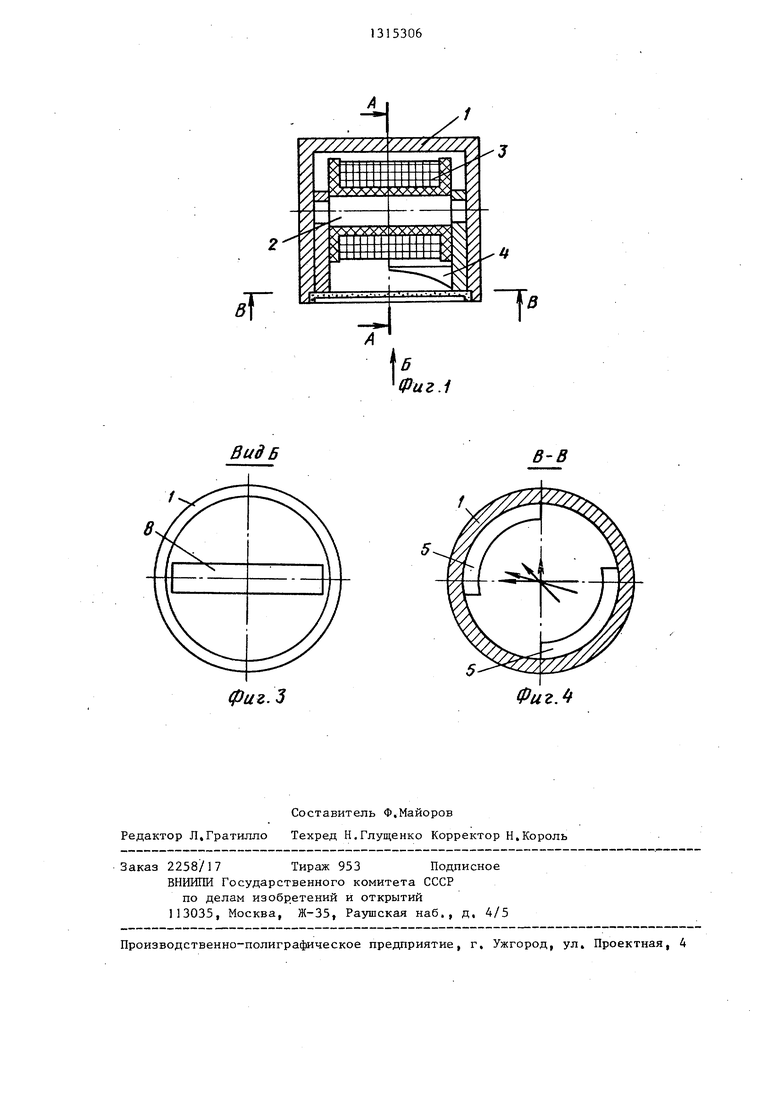
На фиг,1 изображен схват, разрез; на фиг,2 - сечение А-А на фиг.1; на фиг.3 - вид Б на фиг,1; на фиг.4 - сечение на фиг.1.
Электромагнитный схват содержит полый корпус 1 (фиг.1), в котором закреплен магнитопровод 2 с обмоткой 3 и полюсными наконечниками 4(фиг.1 и 2), имеющими форму секторов цилинд ра со скошенной торцовой поверхностью 5, причем полюсные наконечники расположены симметрично относительно оси цилиндра 6, а их вершины диаметрально противоположно, Схват также содержит центрирующий элемент, вьтолненный в виде пластины 7 с пазом 8, изготовленной из микропористого немагнитопроводного материала (например, спеченный бронзовый порошок с размером пор 60-100 мкм и общей пористостью до 40% ), которая образует с корпусом 1 камеру 9, подключенную к источнику избыточного давления (не-показан) через отверстие 10
Схват работает следующим образом
Камера 9 постоянно подключена к источнику избыточного давления, при этом через микропоры пластины 7 проходит сжатый воздух, образуя на наружной поверхности его воздушную пленку, т.е. трение объекта манипулирования фактически исключается.
В момент выхода манипулятора на позицию захвата подается напряжение на обмотку 3 электромагнита. Форма полюсных наконечников обеспечивает
характер градиента напряженности поля, под действием которого изделие перемещается в зону его максимальной напряженности. В результате изделие поворачивается в направлении вершин
полюсных наконечников 4. Заняв ориентированное положение, объект манипулирования западает в паз 8, что фиксирует его от смещений в процессе дальнейшей работы манипулятора. Давление, подаваемое в камеру 9, и напряжение на катушке электромагнита подбирают таким, чтобы деталь плавала под поверхностью пластины 7.
20
25
30
Формула изобретения;
I
Электромагнитный схват, содержа- . щий установленную в корпусе обмотку, расположенную на магнитопроводе, имеющем полюсные наконечники, и закрепленный на корпусе центрирующий элемент, о тлич ающий-ся тем, что, с целью расширения технологических возможностей, он снабжен источником избыточного давления, а центрирующий элемент выполнен в виде пластины из микропористого немагнитопроводного материала, имеющей
35 на ее рабочей поверхности паз и образующей с корпусом камеру, связанную с источником высокого давления, при этом полюсные наконечники выполнены в виде секторов цилиндра со ско40 шенными торцовыми поверхностями и расположены симметрично относительно оси цилиндра, а вершины скосов полюсных наконечников расположены диаметрально противоположно.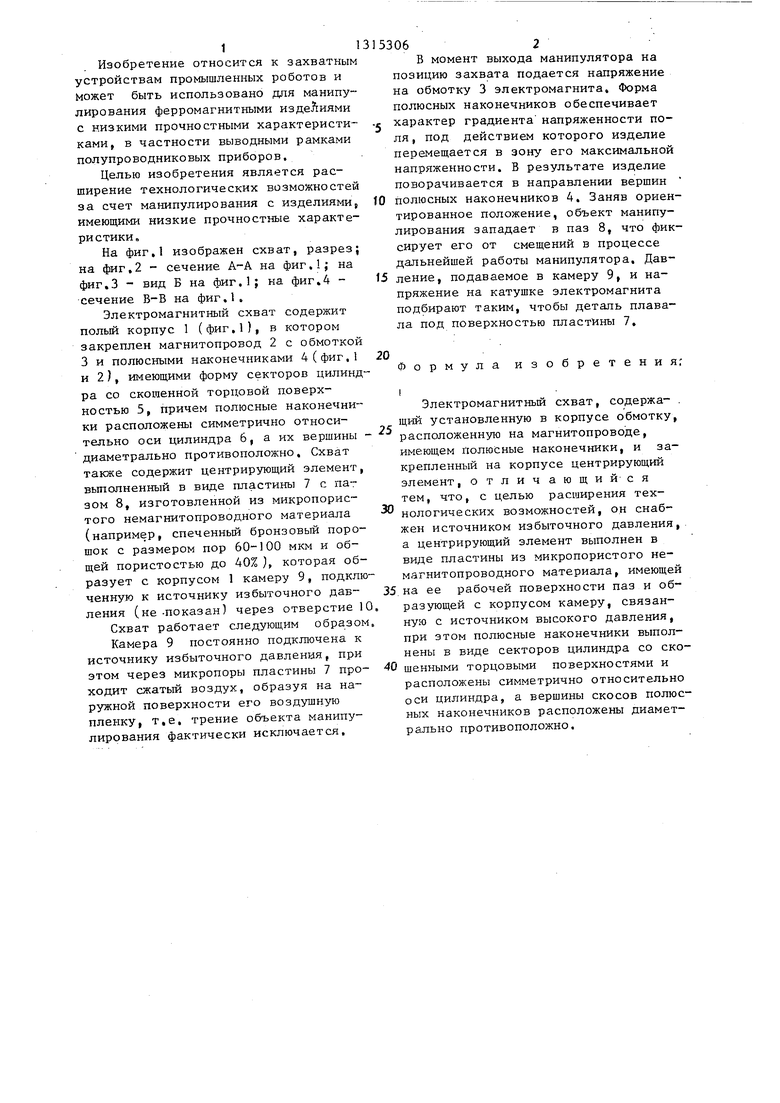
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| Схват промышленного робота | 1986 |
|
SU1316817A1 |
| Магнитный схват | 1990 |
|
SU1812103A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Схват манипулятора | 1985 |
|
SU1284832A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| Манипулятор | 1984 |
|
SU1269990A1 |
Изобретение относится к захватным устройствам промышленных роботов и может быть использовано для манипулирования- ферромагнитными изделиями с низкими прочностными характеристиками, в частности выводными роликами полупроводниковых приборов. Целью изобретения является расширение технологических возможностей за счет манипулирования изделиями, имеющими низкие прочностные характерис- тики. Камера 9, образованная корпусом 1 и микропористой пластиной 7 с пазом 8, постоянно подключена к источнику избыточного давления, при этом через микропоры проходит сжатый воздух, образуя на наружной поверхности пластины 7 воздушную-пленку, исключая тем самым трение между объектом манипулирования и пластиной. В момент выхода манипулятора на позицию захвата подается напряжение на обмотку 3 электромагнита. За счет того что полюсные наконечники 5 выполнены со скосом, электромагнит обеспечивает характер градиента напряженности поля, под действием которого объект манипулирования перемещается в зону его максимальной напряженности и попадает в паз 8. 4 ил. I /4-/J §-5 с ю (Л 00 ел СА:) о 05 . е 9 Фиг. 2
В ид Б
фиг.З
В-В
ФигЛ
Составитель Ф.Майоров Редактор Л.Гратилло Техред Н.Глущенко Корректор Н.Король
Заказ 2258/17 Тираж 953 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Иванов А.А | |||
| Проектирование сис- тем автоматического манипулирования миниатюрными изделиями | |||
| М.: Машиностроение, 1981, с | |||
| Крутильный аппарат | 1922 |
|
SU233A1 |
| I | |||
